���}: Atmega128��Ƭ�C���Ƶ�����С܇�O(sh��)ӋՓ�� [��ӡ���]
����: wang1262123 �r�g: 2018-5-23 14:40
���}: Atmega128��Ƭ�C���Ƶ�����С܇�O(sh��)ӋՓ��
ժҪ
�S���҇��ƌW(xu��)���g(sh��)���M�������ܻ����Ԅӻ����g(sh��)Խ��Խ�ռ������N�߿Ƽ�Ҳ�V����(y��ng)��������С܇�͙C������������I(l��ng)��ʹ���ܙC����Խ��Խ���ӻ�������С܇��һ����N��н���g(sh��)�ļ����w�����ں��˙Cе����ӡ���������Ӌ��CӲ����ܛ�����˹����ܵ��S���W(xu��)�Ƶ�֪�R�������漰����(d��ng)���S��ǰ���I(l��ng)��ļ��g(sh��)��
��ϵ�y(t��ng)����2ƬAVR Atmega128��Ƭ�C��������С܇�ęz�y�Ϳ��ƺ��ġ�һƬ������С܇�ϣ�ؓ؟(z��)����ѭ�E���o����늙C�(q��)�ӹ��ܣ�һƬ�ڿ��ƶ��ϣ�ؓ؟(z��)�����Z�����o���l(f��)�͡�Һ���@ʾ�Ͱ��I���ܡ�ͨ�^���ƶ˵�Һ���@ʾ�Ͱ��Iݔ���O(sh��)��ģʽ��Ϣ����ͨ�^�o���l(f��)�ͽo܇�d��������܇�d����������(j��)���յ��IJ�ͬ�o����Ϣ������С܇�M�벻ͬ��ģʽ�����F(xi��n)��ͬ�Ĺ��ܡ�
��ϵ�y(t��ng)�еğo����ݔ���x���Օ�؞�100�����ң��҃�(n��i)���Ը���һ�Әǣ����ն����յ��l(f��)��˰l(f��)��ğo����̖��
Ŀ���1�� �wՓ
1.1 �x�}���������x
1.2 ����С܇�l(f��)չ�śr
1.2.1 ��������С܇�l(f��)չ�śr
1.2.2 ����(n��i)����С܇�l(f��)չ�śr
1.3 �о��O(sh��)Ӌ��Ŀ��
1.4 �����x��
1.4.1�������x�����
1.4.2 �Դģ�K�x�����
1.4.3 늙C�(q��)��ģ�K�x�����
1.4.4 ѭ�Eģ�K�x�����
1.4.5�o��ģ�K�x�����
1.4.6�Z��ģ�K�x�����
1.4.7�@ʾģ�K�x�����
1.4.8���Iģ�K�x�����
1.5 �����Է���
��2�� ϵ�y(t��ng)���w�O(sh��)Ӌ
2.1 ϵ�y(t��ng)�Y(ji��)��(g��u)��D
2.1.1 ܇�d����������
2.1.2 ���ƶ˿���������
��3�� ϵ�y(t��ng)Ӳ���O(sh��)Ӌ
3.1 ��Ƭ�C��Сϵ�y(t��ng)
3.1.1 �Դ�·
3.1.2 ��(f��)�
3.1.3 �r��·
3.2 �Դģ�K
3.3 늙C�(q��)��ģ�K
3.4 ѭ�Eģ�K
3.5 �o��ģ�K
3.6 �Z��ģ�K
3.7 �@ʾģ�K
3.10 ���Iģ�K
��4�� ϵ�y(t��ng)ܛ���O(sh��)Ӌ
4.1 �������O(sh��)Ӌ
4.1.1܇�d�������������O(sh��)Ӌ
4.1.2���ƶ˿������������O(sh��)Ӌ
4.2 늙C�(q��)���ӳ����O(sh��)Ӌ
4.3 ѭ�E�ӳ����O(sh��)Ӌ
4.4 �Z���ӳ����O(sh��)Ӌ
4.4.1����ӳ����O(sh��)Ӌ
4.4.2�����ӳ����O(sh��)Ӌ
4.5 �o�������O(sh��)Ӌ
4.5.1 �o���l(f��)���ӳ����O(sh��)Ӌ
4.5.2 �o�������ӳ����O(sh��)Ӌ
4.6 �@ʾ�ӳ����O(sh��)Ӌ
4.7 ���I�ӳ����O(sh��)Ӌ
��5�� ϵ�y(t��ng)�{(di��o)ԇ
5.1 Ӳ���{(di��o)ԇ
5.2 ܛ���{(di��o)ԇ
�Y(ji��) Փ
�� �x
�����īI
�� � һ
�� � ��
��1�� �wՓ1.1 �x�}���������x�Ե�һ�_���I(y��)�C�����Q���ԁ����C���˵���չ�ѽ�(j��ng)�鼰�Cе����ӡ�ұ�𡢽�ͨ������������I(l��ng)�����C���˵�����ˮƽ������ߣ�����Ѹ�ٵظ�׃���˂������ʽ���˂��ڲ���̽ӑ�����졢�J�R��Ȼ���^���У�����������˹����ęC��һֱ����ĉ��롣��������С܇��������C���˵ĵ��ʹ���������Ҫ���F(xi��n)�Ԅӌ�(d��o)�����ܺͱ��Ϲ��ܾͱ��Ҫ��֪��(d��o)�������ϵK����F(xi��n)�Ԅ��R�e·�����x�����_�����M·����ʹ�Â�������֪·���������Д������(y��ng)�Ĉ�(zh��)�Є���������С܇�O(sh��)Ӌ�c�_�l(f��)�漰���ơ�ģʽ�R�e�����м��g(sh��)����܇��ӡ�늚⡢Ӌ��C���Cе�ȶ����W(xu��)�ơ������Է֞����֣��������z�y���֣���(zh��)�в��֣�CPU���F(xi��n)����С܇�l(f��)չ�ܿ죬��������ߵ����ИI(y��)���Ќ��|(zh��)�ɹ���������Ɍ��F(xi��n)ѭ�E�����ϡ��z�y�NƬ��������졢���µȻ������ܣ�������ϵ�y(t��ng)�l(f��)չ��څ�ݡ�
1.2 ����С܇�l(f��)չ�śr1.2.1 ��������С܇�l(f��)չ�śr���������С܇�l(f��)չ��Ҳ�ܻ��@����Ҫ��(sh��)�n��������С܇�l(f��)չ���Ѹ�١��n���hꖴ�W(xu��)��܇���ƌ�������w˼�����댧(d��o)�w��˾�Y���£���HCS12�w˼������Ƭ�C����Ę�(g��u)�������С܇ϵ�y(t��ng)��ԓ����С܇ϵ�y(t��ng)��Ҫ���ܞ錤�E�����üt�⡢늴š�CCD�z���^���O(sh��)���M�У��@�����Д�(sh��)CCD�z���^��鳣Ҋ������ٶȿ죬�^���`���������㷨�ϴ�����PID�㷨�M���]�h(hu��n)���ơ�
1.2.2 ����(n��i)����С܇�l(f��)չ�śr����(n��i)����С܇ϵ�y(t��ng)���ı��^������б�������(chu��ng)�Ƽ�����˾���S��ȫ���緶����(n��i)��܇ը���u���¼��IJ������࣬��˰�ȫ�z�鲿�T���ش��ӵ���܇�z��Ҳ�����������^ȥ�H�z��܇��(n��i)��܇�䣬�����錦����܇��ȫ��λ�z�顣��ȫ���ɕ����������в����˱�������(chu��ng)�Ƽ���UP_UVSR����С܇�C���ˡ�UP_UVSR����һ��ᘌ�܇�יz���΄�(w��)�аl(f��)�ęC����ϵ�y(t��ng)��ԓ�a(ch��n)Ʒ�w�eС�������p�����ڔy�������I(y��)Ч�ʸߣ������?c��)�܇���M�Йz�飬Ҳ���Թ̶����b�c܇�vͨ���ڌ��^��܇�v�M�Йz�顣
1.3 �о��O(sh��)Ӌ��Ŀ���O(sh��)Ӌһ���������С܇ϵ�y(t��ng)��ͨ�^���ƶ˵Ć�Ƭ�C�z�y���I��ݔ�룬����(j��)ݔ��IJ�ͬģʽ�����Ɵo��ģ�K�l(f��)�Ͳ�ͬ�����С܇�ϵ�܇�d���������յ��o����̖��Ȼ���Д���յ��ğo����̖��������С܇�M�벻ͬ��ģʽ�����ƶ˵Ć�Ƭ�Cͨ�^LCD���Z��ģ�K�M�Ѕ���(sh��)��Ϣ���@ʾ�Ͳ���
1.4 �����x��1.4.1�������x�������������Ҫ���ڸ�����������̖�Ľ��պͱ��J������С܇��늙C�Ą���������������܇ϵ�y(t��ng)�����K�����]����Ҫ���F(xi��n)�������ܵ�Ҫ����ģ�K���_�Ĕ�(sh��)Ŀ���г����·��������������Փ�C���x��
����һ������ATMEL��˾��AT89S52��AT89S52��Ƭ�C֧���ھ����̣����ڲ������r����ˣ����g(sh��)���죬��(y��ng)�ÏV�������ǹ��܆�һ�����ϵ�y(t��ng)늙C�(q��)����Ҫ����Ӳ����ܛ�����F(xi��n)�^���(f��)�s������AT89S52 ��Ƭ�C���_��(sh��)�^�٣��_��������ģ�K�˿ڵ�Ҫ��
������������ATMEL��˾��ATmega128��ATmega128��һ�����AVR��(n��i)�ˣ�����RISC�Y(ji��)��(g��u)�������ܣ�����CMOS��8λ��Ƭ�C��32��ͨ�ù����Ĵ�����53��ͨ��I/O�ڣ����r�r�Ӌ��(sh��)����RTC��,4�����б��^ģʽ�`��Ķ��r��/Ӌ��(sh��)����2���ɾ��̵�USART�ӿڣ�1��8λ�����ֹ�(ji��)��TWI(IIC)�����ӿڣ�8ͨ���ζ˻���ݔ���10λADC������һ�����ͨ����������{(di��o)�ģ����ɾ��̎���(n��i)����ʎ���Ŀ��T�����r����һ��SPI�ӿڣ�һ������IEEE1149.1�˜ʵ�JTAG�ӿڣ������ھ������{(di��o)ԇ�ͳ������d����6�N��ͨ�^ܛ���x��Ĺ�(ji��)�ģʽ���ɂ������A(y��)���l�������^���ܺͲ����ܵ�16 λ���r�� /Ӌ��(sh��)������·8 λPWM��6·�ֱ��ʿɾ��� ��2 ��16 λ���� PWM��
�����������ø��Ӹ߶˵�̎����S3C2410��S3C2410��һ��A(y��)RM��(n��i)�˵�̎�������mȻ�߂���AVR���YԴ�����Ǹ���(j��)���O(sh��)Ӌ�Č��H��r���ɱ����^�ߣ������y���^��
�C���������N���������]��ϵ�y(t��ng)�Ŀ����ԣ������ģ����ܣ�Ӳܛ���ijɱ������x������
1.4.2 �Դģ�K�x���������һ�����Â��y(t��ng)��7805���˷�(w��n)���·��С܇�늳�(7.4V)��(j��ng)�^7805��(w��n)���oС܇늙C�(q��)���·�͆�Ƭ�C������������늡�����С܇늙C����˲�g��Ҫ���Ĵ���������L�r�g��ʹ��7805оƬ�������@�İl(f��)�C�F(xi��n)����Ч��Ҳ�ܵͣ�늳س�Mһ��늺�С܇���]��ã��͵��ٴγ�늡�
������������LM2596�_�P(gu��n)�ͷ�(w��n)��оƬ�����늸к���ݣ�һ����䘋(g��u)�����w���Դ�·��Ч�ʸ��ߣ�����Ҳ���ӷ�(w��n)����
�C�����σɷN���������]��ϵ�y(t��ng)�����ܺͷ�(w��n)���Է��棬�x������
1.4.3 늙C�(q��)��ģ�K�x�����늙C���(q��)���·��Ҫͨ�^늙C�����D(zhu��n)�ͷ��D(zhu��n)���F(xi��n)С܇��ǰ��������ҷ����������늙C�(q��)��ģ�K������ĎN������
����һ��ʹ�ù������O�����鹦�ʷŴ�����ݔ������ֱ��늙C���������(q��)�ӵ��·�Y(ji��)��(g��u)��ԭ�����Σ��ɱ��ͣ������������������ʓp�Ĵ��e�ǵ��ٴ��D(zhu��n)���\�Еr��ͨ�^���R������l(f��)�ᅖ�����p�Ĵ���С܇���L�r�g�\�в�����
�������������^�����늙C���_���P(gu��n)�M�п���,ͨ�^�_�P(gu��n)���ГQ��С܇���ٶ��M���{(di��o)�����˷����ă�(y��u)�c���·�^�麆��,ȱ�c���^�����푑�(y��ng)�r�g��,�דp��,�����^��,�ɿ��Բ��ߡ�
�����������Ì���늙C�(q��)��оƬL298N�����F(xi��n)��D��D1-1��ʾ��ԓоƬ���ɶȸߣ�ռ�ÿ��gС����Ҫ��(y��ng)����늙C�{(di��o)�و��ϡ�L298N�Ǻ㉺�����pH��늙CоƬ����ͬ�r���ƃɂ�늙C����ݔ��������_��2A��L298N�Ĕ�(sh��)��(j��)�ڷքe�c��Ƭ�C��I/O�����B�������{(di��o)����̖���@�Ӿ��ȸ߲��ҷ�(w��n)���������Ժã�����ͨ�^�����܌��F(xi��n)�˙C���x�������{(di��o)ԇ��
�C���������N���������]��AVR��Ƭ�C�Ԏ���PWM����,�܌��F(xi��n)ֱ���p��늙C���ʿ��ƣ��x������
1.4.4 ѭ�Eģ�K�x�����ѭ�Eģ�K�_����С܇�ں�ɫ߅�羀�ą^(q��)���(n��i)�����]��߅�羀�Ǻ�ɫ�ģ����Կ��]���Â��������Jِ܇���غڰ׃ɷN��ͬ��B(t��i)�������������x�������·�����
����һ�����ß�̽�y������̽�y�������������յ��ļt��ݗ�������ضȵ�׃�����ضȵ�׃���������̖��ͬ��ݔ������ݔ�������̖�c�ضȵ�׃���ɱ�������(d��ng)�t�⾀����ɫ�����Օr���ضȕ����ͣ�늉�׃�ͣ����t�⾀�]�б����Օr��늉���׃����Ƭ�C���Ը���(j��)늉���׃�����Д�С܇�@ʾ����r�����ڜض��ܭh(hu��n)����Ӱ푺ܴ�(d��ng)�ض�׃�ߕr����ʹ��ɫ�������˼t�⾀������Ҳ���кܸߵ�늉�����(d��o)��Ƭ�C�Д���e��
�����������üt�⌦��ܡ��t��l(f��)����չܜy�����x����������(y��ng)�`�����ʴ_�����ڜy���ĸ߶��x���H1 cm�����x�ܽ������������c����ȟ�̽�y������,���w�e�^С,�r���,���b�^���ס�
�C�����σɷN���������]��ϵ�y(t��ng)�ķ�(w��n)���ԺͰ��b�ĺ����ԣ��x������
1.4.5�o��ģ�K�x������o��ģ�K���Á��M�п��ƶ˺�С܇֮�g��ͨ�ţ�����С܇�M�벻ͬ�Ĺ���ģʽ��
����һ������Ŀǰ���е�WiFi�o��ģʽ��WiFi���w��V����ݔ���h��������Ӳ���_�N�ɱ�̫�ߣ���Ҫ��������Փ֪�R���A(ch��)���̕r�g��(n��i)���F(xi��n)��һ�����y�ȡ�
������������TI��CC1101�o����ݔ��������Ч��ݔ���x��100�ף������l�ʞ�387��464MHZ������һ�w���ȿ�������l(f��)�Ͷˣ�Ҳ����������նˣ�ܛ�������`����Ρ���ģ�K���`���ȣ�1.2kbps��-110dDm��0.1����(sh��)��(j��)���`�a�ʣ�����(n��i)��Ӳ��CRC �z�e���c�����cͨ�ŵ�ַ���ơ��^�͵�������ģ�RX�У�15.6mA��2.4kbps,433MHz���ɾ��̿��Ƶ�ݔ�����ʣ����ݔ������+10dBm���o�����ѹ��ܣ�֧�ֵ���늴Ų�����ܣ��o�����ѵ���˯�ߠ�B(t��i)���O(sh��)��ȃ�(y��u)�c��
�C�����σɷN���������]��ϵ�y(t��ng)�_�l(f��)�ɱ����_�l(f��)�r�g���x������
1.4.6�Z��ģ�K�x������Z��ģ�K���Á��M����С܇�M�벻ͬ�Ĺ���ģʽ��С܇�D(zhu��n)��r���M���Z������ʹ����ϵ�y(t��ng)�������Ի�Щ��
����һ������555���r�����l(f��)���ض��l�ʵ�����ȱ�c��ֻ�ܰl(f��)��һ���l�ʵIJ����y�l(f��)���������
������������ISD1760���I(y��)�Z��䛷�оƬ��ISD1760��䛡�����ʮ�f�Σ��惦��(n��i)�ݿ��Ԕ�늱���һ���ꡣ�ɷN䛷�ģʽ���������I䛷�ģʽ��SPI��������䛷�ģʽ����̎�����_ 255 ����Ϣ�������(sh��)��(j��)�惦��оƬ�� FLASH ��(n��i)���]�н�(j��ng)�^�κΉ��s���������^�õ����|(zh��)�͔�늴惦����N�ɘ��l�ʌ���(y��ng)��N䛷ŕr�g������늉���2.4V-5.5V���o�B(t��i)�����0.5 - 1 ��A�����������20mA
�C�����σɷN���������]��ϵ�y(t��ng)�Ĺ���Ҫ��Ϳ��Ƶ��`���ԣ��x������
1.4.7�@ʾģ�K�x���������һ������LCD 1602Һ���M��С܇����(sh��)����Ϣ�@ʾ��1602��2��16��ʽ��Һ���������@ʾһЩ��(sh��)�ֺ�Ӣ����ĸ�Լ�һЩ���εĈD��������1602��(n��i)���o�֎죬Ҫ���@ʾ�h�־͵��Լ������h�ִa�ˣ�ܛ���_�l(f��)������
������������LCD 12864 �ַ�ʽҺ��������12864Һ����(n��i)�����֎죬���܉��@ʾ����ϢҲ���࣬LCD1284��LCD1602�����ڕr������ϲ�e����ܛ��һֱ�����ס�
�C�����σɷN���������]��ϵ�y(t��ng)��Ҫ���x������
1.4.8���Iģ�K�x���������һ������4*4����I�P����Ӌ��Ҫ16���������I��ռ�Æ�Ƭ�C8��IO�˿ڡ�
�����������ê����İ��I���Y(ji��)�ϱ�ϵ�y(t��ng)��ֻ��Ҫ6���������I���ɝM��Ҫ��Ƭ�CֻҪ�z�y����(y��ng)�����_�ƽ�ׂ��Д���һ���I�����¡�
�C�����σɷN���������]��Ӳ�����_�l(f��)�ɱ���ܛ�������ϵĺ����ԣ��x������
1.5 �����Է�������ATmega128A��Ƭ�C������ƺ��ģ���˜ʹ����l�ʞ�8MHz,���Ԟ鱾ϵ�y(t��ng)�ṩ���ٵ�Ӌ�������͌��r�����������W(xu��)У��Ӳ�����A(ch��)����ҿ����ṩ���Ӻ��{(di��o)ԇ���أ��{(di��o)ԇ�O(sh��)��ֻ��Ҫ����F���f�ñ���ʾ�����ȳ����O(sh��)�伴�ɡ�
����W(xu��)�_�O(sh��)�ġ�C�Z�Ծ��̡�������Ƭ�C���g(sh��)������ģ�M��Ӽ��g(sh��)������Protel��(y��ng)�ü��g(sh��)�������P(gu��n)�n�̵ČW(xu��)��(x��)�����Ԟ�ԓϵ�y(t��ng)���O(sh��)Ӌ�c���F(xi��n)�ṩ��Փ֪�R��
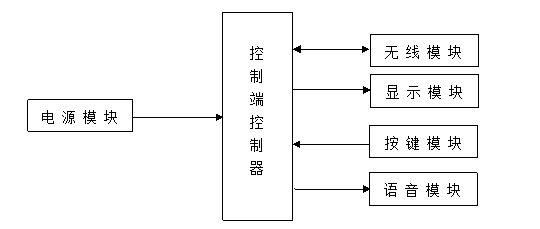
��2�� ϵ�y(t��ng)���w�O(sh��)Ӌ2.1 ϵ�y(t��ng)�Y(ji��)��(g��u)��D��ϵ�y(t��ng)��Ҫ�֞�ɂ���ģ�K��܇�d������ģ�K�Ϳ��ƶ˵Ŀ�����ģ�K��
2.1.1 ܇�d����������܇�d������ģ�K��D2-1��ʾ��
�D 2-1 ܇�d������ģ�K�Y(ji��)��(g��u)��D
�ĈD2-1�п��Կ�����܇�d���ֵĿ�����ģ�K��Ҫ�����Դģ�K��늙C�(q��)��ģ�K��ѭ�Eģ�K������ģ�K���o��ģ�K������ģ�K�Ĺ��ܽ�B���¡�
1���Դģ�K��
����7.4V���늳أ���(j��ng)�^�����·������5V�o����ϵ�y(t��ng)��
2��늙C�(q��)��ģ�K��
ʹ�Ã�ƬL298N�(q��)��С܇��늙C�����Æ�Ƭ�C��PWM���ܣ������(q��)��оƬ���(q��)��оƬ�ٿ���늙C�����F(xi��n)С܇������D(zhu��n)���ܡ�
3��ѭ�Eģ�K��
����7���t�⌦��������Ƭ�Cݔ�룬��z�y��ɫѭ�E��·��
4���o��ģ�K��
܇�d���������Ɵo��ģ�K�����տ��ƶ˵ğo����̖��Ȼ�����(j��)�����յ��ğo����̖��܇�d����������С܇��(zh��)�в�ͬ�Ĺ��ܡ�
2.1.2 ���ƶ�����������܇�d������ģ�K��D2-2��ʾ��
�D 2-2���ƶ˿������Y(ji��)��(g��u)��D
�ĈD2-2�п��Կ�����܇�d��������Ҫ�����Դģ�K���o��ģ�K���@ʾģ�K�����Iģ�K���Z��ģ�K������ģ�K�Ĺ������¡�
1���Դģ�K
����4��(ji��)5̖��늳ؽ�(j��ng)�^7805��(w��n)����5V�o���ƶ˵�ϵ�y(t��ng)ʹ�á�
2���Z��ģ�K��
ʹ��ISD1760оƬ�惦����Ϣ����ӓP������(d��ng)���I�O(sh��)��С܇�M�벻ͬ�Ĺ���ģʽ�r�����F(xi��n)�������ܡ�
3�����I�·��
��ʹ��6���������I��4�������I��һ���ˆ��I��һ���_���I��ؓ؟(z��)�O(sh��)��С܇�M�벻ͬ�Ĺ���ģʽ��
4���@ʾģ�K��
ʹ��LCD12864����(d��ng)���I�O(sh��)��С܇�Ĺ���ģʽ�r�������ֵ���ʽ�@ʾģʽ�O(sh��)�������M��o��ģʽ�r��ؓ؟(z��)�@ʾС܇�IJٿv����
��3�� ϵ�y(t��ng)Ӳ���O(sh��)Ӌ����Ӳ��ϵ�y(t��ng)���O(sh��)Ӌ��Ƭ�C��Сϵ�y(t��ng)ģ�K���Դģ�K��늙C�(q��)��ģ�K��ѭ�Eģ�K���o��ģ�K���Z��ģ�K���@ʾģ�K�����Iģ�K��
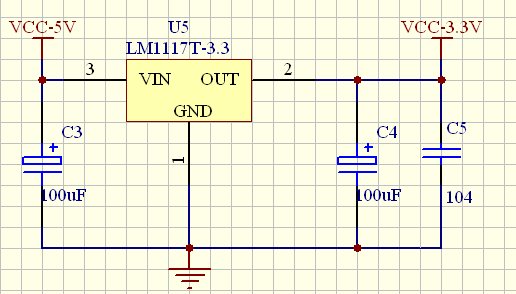
3.1 ��Ƭ�C��Сϵ�y(t��ng)3.1.1 �Դ�·�Դ�·��ֱ��5Vݔ��o����оƬLM117��Ȼ����3.3V�o��Ƭ�C������3.3Vģ�Kʹ�á��Դ�·��D3-1��ʾ��
�D 3-1 �Դ�·
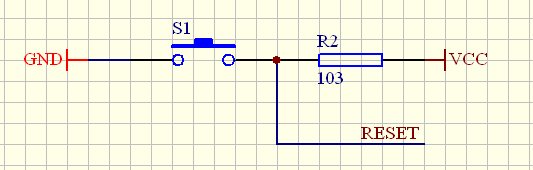
3.1.2 ��(f��)λ�·��Ƭ�C�ď�(f��)λ��ʽ������Կ���(f��)λ���ֹ���(f��)λ�ɷN�����O(sh��)Ӌ�Џ�(f��)λ�·���õ����ֹ���(f��)λ�·����D3-2��ʾ��
�D 3-2 ��(f��)�
��Ƭ�C��REST���_�����C�ṩһ���ⲿ��(f��)λ��̖ݔ��˿ڡ���(f��)λ��̖�ǵ��ƽ��Ч�����ƽ��Ч�ij��m(x��)�r�g������С�}�_����(1.5us)�r���|�l(f��)��(f��)λ�^�̡���(f��)λ��Ƭ�C��(n��i)���������֏�(f��)����ʼ��B(t��i)����Ƭ�C��ROM��ַ��0000H�_ʼ��(zh��)�г���
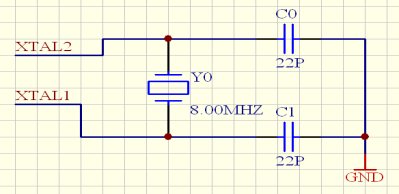
3.1.3 �r��·�r��·��D3-3��ʾ��
���հ�̎�a�ϣ�
�D 3-3 �r��·
��Ƭ�C�Ĺ����r�g�������ɕr��·�ṩ�ģ��چ�Ƭ�C��XTAL1��XTAL2�ăɂ����_�g������һ��8MHz���ɂ�22pF��ݼ���(g��u)���ˆ�Ƭ�C��Сϵ�y(t��ng)�ĕr��·��
�r��·�е��������ԏ�ATmega128��оƬ�Y���ϴ_����Ҳ���ԅ���һЩ��Ҋ���·�ą���(sh��)��
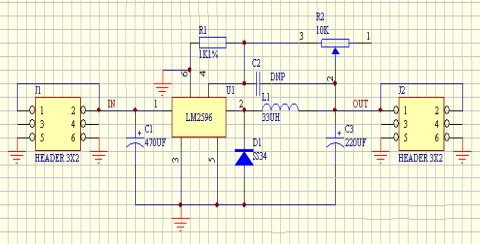
3.2 �Դģ�K�Դģ�K���õ���LM2596�_�P(gu��n)�ͷ�(w��n)��оƬ��7.4V���늳ؽ�(j��ng)�^LM2596��(w��n)����5V�o����ϵ�y(t��ng)���Դģ�K�·�D��D3-4��ʾ��
���հ�̎�a�ϣ�
�D3-4�Դģ�K�·�D
�늳�늉���J1ݔ��oLM2596�����·��5V��J2ݔ�������o����ϵ�y(t��ng)��R2����{(di��o)��裬�����{(di��o)��(ji��)ݔ��늉���D1��SS34Ф�ػ����O�ܣ������_�P(gu��n)�ٶȿ죬�����͵����c�����·�����L1늸У���(g��u)�ɻ�·�����m(x��)�������á�
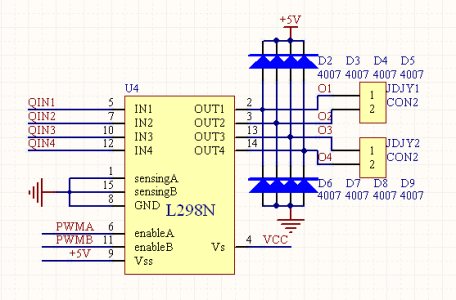
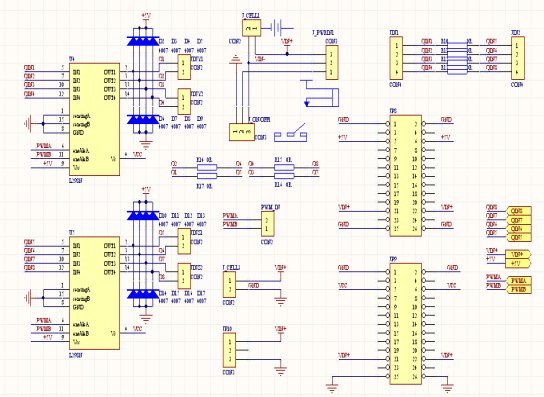
3.3 늙C�(q��)��ģ�K늙C�(q��)��ģ�K������2ƬL298NоƬ���M�Ќ�С܇��4��늙C�Ŀ��ơ�����һƬL298N늙C�(q��)���·�D��D3-5��ʾ��
���հ�̎�a�ϣ�
�D3-5늙C�(q��)��ģ�K�·�D
�D��QIN1��QIN4��оƬݔ��ˣ��ӆ�Ƭ�CPD4��PD5��PD6��PD7�ڣ�O1��O4��оƬݔ���ˣ���늙C��JDY1��JDJY2��늙C��������PWA��PWMB��PWMݔ���_����܇�d��������PB5(OC1A)��PB6(OC1B)PWMݔ�����_��D2��D9��1N4007���O�ܣ����·�����oL98NоƬ�����ã���ֹ늙C�������D(zhu��n)��˲�g���a(ch��n)����늄ӄݓ���L298NоƬ��
3.4 ѭ�Eģ�Kѭ�Eģ�K�����˹�Ӌ7���t�⌦��ܣ�7·ѭ�E��܇�d��������PA0~PA7�ڡ�����һ���t�⌦��ܵ��·��D3-6��ʾ��
���հ�̎�a�ϣ�
�D3-6 ѭ�Eģ�K�·�D
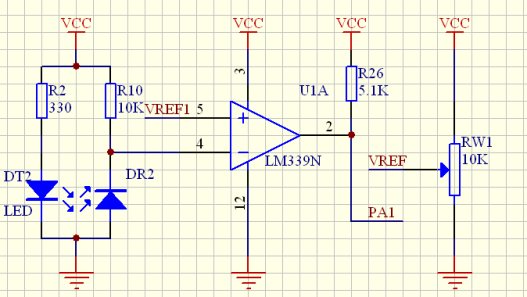
�t�⌦��ܞ�DT2��DR2��LM339N����^��,RW1��10K�Ŀ��{(di��o)��衣��(d��ng)DR2���յ�DT2�l(f��)��ļt���r��(d��o)ͨ���˕r339�ķ���ݔ��˞�߉0������ݔ���VREF�ƽ���ڷ���ݔ����ƽ������(j��)���^�������ԣ����^��ݔ���˞���ƽ��܇�d��������PA1��Ҳ����ƽ����(d��ng)DR2δ���յ��t����ǽ�ֹ���˕r339�ķ���ݔ��˞���ƽ�Ҹ�������ݔ���VREF��늉�ֵ�����^��ݔ���˞���ƽ��܇�d��������PA1��Ҳ����ƽ��
3.5 �o��ģ�K�o��ģ�K���ÏľW(w��ng)��ُ�I��CC1101ģ�K���o��ģ�K����D��D3-7��ʾ��
�D3-7 �o��ģ�K����D
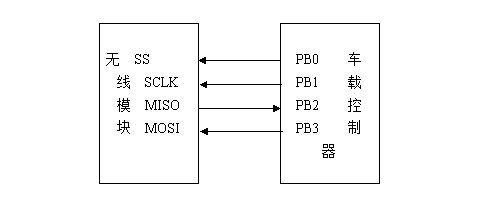
CC1101����늉���1.8V~3.6V����߲����^3.8V����ϵ�y(t��ng)�o��ģ�K����늉����o����3.3V��܇�d������ͨ�^IOģ�MSPI���п����ķ�ʽ�͟o��ģ�K�M�����B�ӡ��o��ģ�K��܇�d���������B�ӈD��
�D3-8��ʾ��
܇�d������ATmega128A��PB0��CC1101��Ƭ�x���_/SS,����CC1101�Ƿ��xͨ��܇�d������ATmega128A��PB1��CC1101�Ĵ��Еr�ݔ���_SCLK������ͬ��MOSI��MISO�Ĕ�(sh��)��(j��)��ݔ��܇�d������ATmega128A��PB2��CC1101�Ĵ��Д�(sh��)��(j��)ݔ���_MOSI��CC1101��ԓ���_�x��l(f��)��/���������֣�܇�d������ATmega128A��PB3��CC1101�Ĵ��Д�(sh��)��(j��)ݔ���_MISO, ܇�d��������ԓ���_���Ձ��ԟo��ģ�K��������̖��
�D3-8 �o��ģ�K��܇�d���������B�ӈD
3.6 �Z��ģ�K�Z��ģ�K�DZ�ϵ�y(t��ng)�е���Ҫ����ģ�K����(d��ng)���I�O(sh��)��С܇�M�벻ͬ�Ĺ���ģʽ�r���Z��ģ�K�܉�����(y��ng)��ģʽ��Ϣ����ֹ�O(sh��)���M���e�`��ģʽ��
�Z��ģ�K����D��D3-9��ʾ��
�D��MIC�����ݔ�����ˣ����IҲ�Ɍ��F(xi��n)����ͷ����IJ�����
���հ�̎�a�ϣ�
�D3-9 �Z��ģ�K����D
�Z��ģ�K�Ϳ��ƶ˵Ŀ������B�ӈD��D3-10��ʾ��
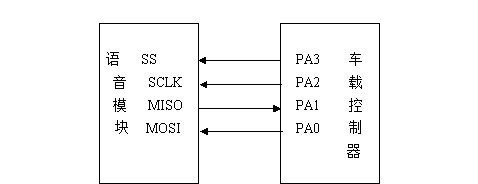
ISD1760�cATmega128A�ӿڞ�SPI���п����ӿڣ���Ƭ�Cͨ�^Ƭ�x��SS(SS=0�r���SISD1760����)�����Д�(sh��)��(j��)ݔ��MISO�����Д�(sh��)��(j��)ݔ��MOSI�ʹ��Еr�SCLK��ISD1760�M���B�ӡ�
��Ƭ�CB ATmega128A��PA3��ISD��Ƭ�x���_/SS,����ISD1760�Ƿ��xͨ��ATmega128A��PA2��ISD�Ĵ��Еr�ݔ���_SCLK������ͬ��MOSI��MISO�Ĕ�(sh��)��(j��)��ݔ��ATmega128A��PA1��ISD�Ĵ��Д�(sh��)��(j��)ݔ���_MOSI��ISD��ԓ���_�x��䛡������ĵ�ַ��Tmega128A��PA0��ISD�Ĵ��Д�(sh��)��(j��)ݔ���_MISO,��Ƭ�CB��ԓ���_���Ձ����Z��оƬ��������̖��
���հ�̎�a�ϣ�
�D3-10 �Z��ģ�K��܇�d���������B�ӈD
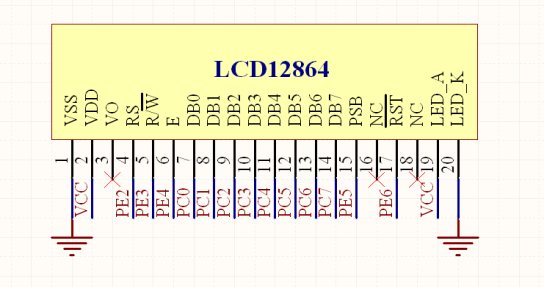
3.7 �@ʾģ�K�@ʾģ�K��Ӳ��ԭ��D��D3-11��ʾ��
VSS��LED_K�ӵأ�VDD��/RST��+5V�Դ��Һ����(sh��)��(j��)��DB0~DB7�B��AVR128��PC�ڡ�RS�ӆ�Ƭ�CPE2����(d��ng)����ƽ�r����ʾDB0~DB7���@ʾ��(sh��)��(j��)������ƽ�r����ʾDB0~DB7���@ʾָ�(sh��)��(j��)��R/W�ӆ�Ƭ�CPE3�ڣ�ʹ����̖E�ӆ�Ƭ�CPE4�ڣ�R/W����ƽ��E����ƽ����(sh��)��(j��)���x��DB0~DB7��R/W����ƽ��E�ĸ��ƽ�D(zhu��n)�Q�����ƽ��DB0~DB7������Һ����(n��i)����DDRAM�
���հ�̎�a�ϣ�
�D3-11 �@ʾģ�K�·�D
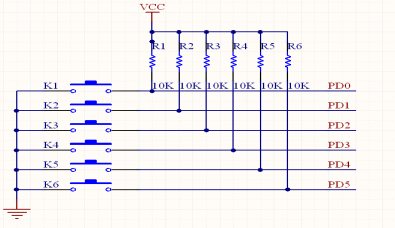
3.10 ���Iģ�K���Iģ�K�·�D��D3-12��ʾ��
�D3-12 ���Iģ�K�·�D
6�����I����ݔ�뷽ʽ����������˿�������PD0��PD5 IO�ڡ���(d��ng)�а��I���r������(y��ng)�Ķ˿��ƽ׃?y��u)���ƽ���?d��ng)���I̧��r������(y��ng)���ƽ׃?y��u)���ƽ�?/font>
K1��K4�քe��Up��Down��Left��Right�I����(d��ng)С܇�M��o���b��ģʽ�r��ؓ؟(z��)С܇��ǰ�M�����ˡ����D(zhu��n)�����D(zhu��n)���ܡ�
K5��ˆ��I��ؓ؟(z��)С܇�M��ηNģʽ�ˆε��O(sh��)���@ʾ����(d��ng)K�����r��K1��K3�քe����(y��ng)�o��ģʽ��ѭ�Eģʽ�ͱ���ģʽ��
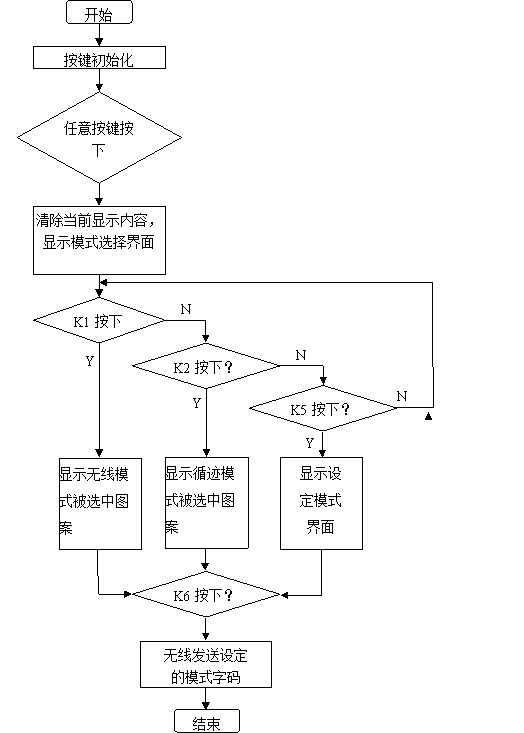
K6��_���I����(d��ng)K5���£�K1��K3�O(sh��)��ij�Nģʽ����K6��Ȼ��ͨ�^�o��ģ�K��ģʽ�ִa�l(f��)�ͽo܇�d��������
��4�� ϵ�y(t��ng)ܛ���O(sh��)Ӌϵ�y(t��ng)��ܛ���O(sh��)Ӌ����C�Z�ԣ�����Ƭ�C�M�о��̌��F(xi��n)��헹��ܡ�
��������Windows XP�h(hu��n)���²���CodeVisionAVR C Complilerܛ�����g�ġ�
4.1 �������O(sh��)Ӌ��ϵ�y(t��ng)��Ҫ�֞�ɂ�������܇�d�������ϵ�������Ϳ��ƶ˿�������������
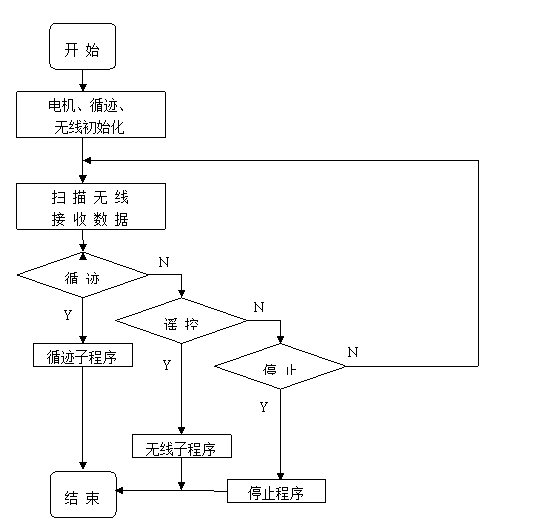
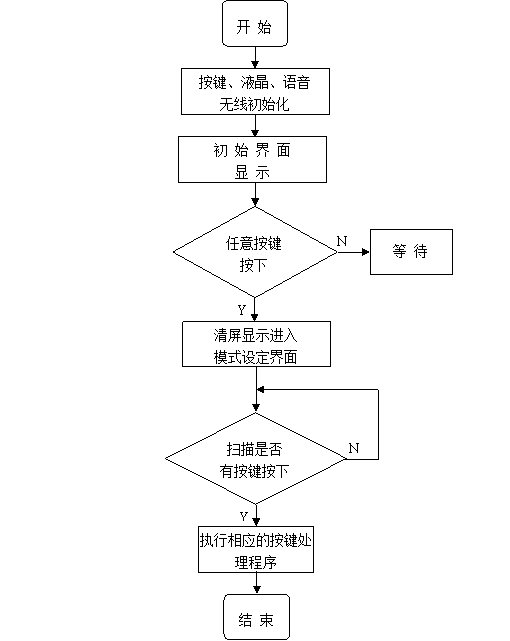
4.1.1܇�d�������������O(sh��)Ӌ���������ģ�K����˼���O(sh��)Ӌ��܇�d�����������������̈D��D4-1��ʾ��
�ĈD4-1�п��Կ�����܇�d�տ����������M�Ќ�늙Cģ�K��ѭ�Eģ�K�͟o��ģ�K�ij�ʼ������ʼ����Ҫ��������ģ�K�Ϳ��������B�ӵ�IO�˿ڵ�ݔ��/ݔ����ʼ�����Լ�һЩ���ܼĴ����ij�ʼ����
��ʼ����ɺ����M��whileѭ�h(hu��n)���_ʼ�Д��o�����յ��Ĕ�(sh��)��(j��)������o�����յ��Ĕ�(sh��)��(j��)��ѭ�Eģʽ�ִa(0xa0)���t�M��ѭ�E�ӳ���С܇�_ʼѭ�E;����o�����յ��Ĕ�(sh��)��(j��)�ǟo���b��ģʽ�ִa(0xa1)���t�M��o���b��ģʽ���_ʼС܇�ğo���b�����ܡ�����]�н��յ��κ�ģʽ�ִa���߽��յ��IJ����@���Nģʽ�ִa������һ�����tС܇ֹͣ��
�D4-1 ܇�d���������������̈D
4.1.2���ƶ˿������������O(sh��)Ӌ���ƶ˿����������������̈D��D4-2��ʾ��
�D4-2 ���ƶ˿��������������̈D
�ĈD4-2�п��Կ��������ƶ˿տ����������M�Ќ����Iģ�K��Һ��ģ�K���Z��ģ�K�͟o��ģ�K�ij�ʼ������ʼ����Ҫ��������ģ�K�Ϳ��������B�ӵ�IO�˿ڵ�ݔ��/ݔ����ʼ�����Լ�һЩ���ܼĴ����ij�ʼ����
��ʼ����ɺ��@ʾһ��ʼ������Ϣ��Ȼ���Д��Ƿ������ⰴ�I���£��������ⰴ�I���£��t�����@ʾ��Ϣ���@ʾģʽ�O(sh��)����Ϣ��Ȼ���������_ʼ�_ʼ̎�����I����
4.2 늙C�(q��)���������O(sh��)Ӌ����(j��)늙C�(q��)��оƬL298���ęn�Y�ϣ�IN1��5����IN2��7����IN3��10����IN4��12���քe����(y��ng)OUT1��2����OUT2��3����OUT3��13����OUT4��14������ݔ��ߵ��ƽ����(y��ng)��������IN1��߄tOUT1��ߣ�����(d��ng)Ȼ�@Ҫ�ǽ�����ʹ�ܶ˝M�����r�²ſ��ԣ� ENA��6����ENB��11����ʹ�ܶˣ�ENA����OUT1��OUT2��ENB����OUT3��OUT4�����ƽ��Ч�����ڵ��ƽ��r�£��oՓݔ������̖��ݔ��������ƽ��
�F(xi��n)��IN1��IN2��OUT1��OUT2��������늙C���D(zhu��n)��ԔҊ��4-1��
��4-1늙C�D(zhu��n)�Ӡ�B(t��i)��ֵ��
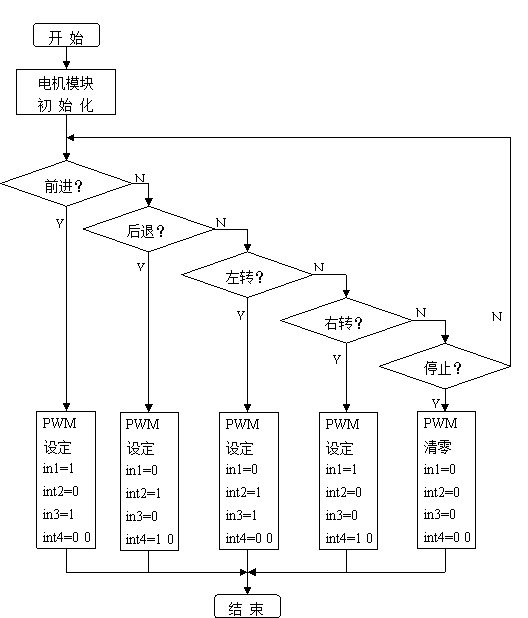
늙C�(q��)���ӳ�������̈D��D4-3��ʾ��
�D4-3 늙C�(q��)���ӳ������̈D
�ĈD4-3�п��Կ�����늙C�(q��)�ӄӳ�������Ҫ��늙Cģ�K��ʼ������ʼ����Ҫ����늙C�(q��)��оƬ��ݔ��˿�PORTD.4~PORTD.7�Ķ˿�ݔ�������ʼ����PWMݔ��ͨ�� PORTB.5��PORTB.6��ݔ�������ʼ�������r��1��PWMݔ���l�ʼ�PWMӋ��(sh��)��픶�ֵ�ij�ʼ����Ȼ���M���������_ʼ�Д������־λ�������ǰ�M��־���t�{(di��o)��ǰ�M����(sh��)�����O(sh��)��PWMռ�ձȣ�Ȼ����늙C�(q��)��оƬ��ݔ���in1=1��in2=0(��݆���D(zhu��n))��in3=1,in4=0(��݆���D(zhu��n))��С܇����ǰ����������D(zhu��n)��־���t�{(di��o)�����D(zhu��n)����(sh��)�����O(sh��)��PWMռ�ձȣ�Ȼ����늙C�(q��)��оƬ��ݔ���in1=����in2=��(��݆���D(zhu��n))��in3=1,in4=0(��݆���D(zhu��n))��С܇���_ʼ���D(zhu��n)�������ĺ��ˡ����D(zhu��n)��ֹͣ����(sh��)��ǰ�����v��ƣ��ڴ˲���٘����
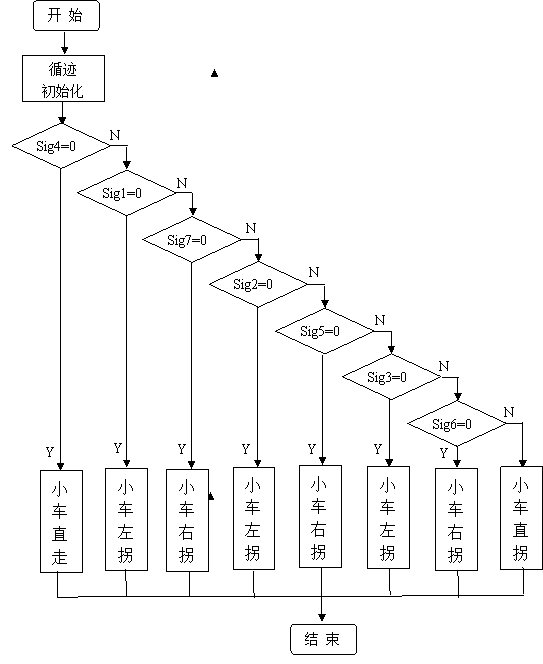
4.3 ѭ�E�������O(sh��)Ӌ��ϵ�y(t��ng)߅��z�yģ�K���õ��Ǽt�⌦��ģ�K����С܇����ǰ��λ�ð��b��7֧�t�⌦��ܣ��@Щ�t�⌦������Á�z�y��֪̽��ɫѭ�E��·�ġ�
С܇ѭ�E��ͨ�^7���t�⌦��܁�z�y�ģ���4-2�г���С܇�ĸ�����B(t��i)��
��4-2�t�⌦��ܠ�B(t��i)��ֵ��
���w����ɸ���(j��)ѭ�E���̈D4-4��ʾ�M�г�����
�ĈD4-4�п��Կ�����ѭ�E�ӳ�������Ҫ��ѭ�Eģ�K��ʼ������ʼ����Ҫ������ѭ�Eģ�K��܇�d�������Ľӿ�PORTA.0~PORTA.6�Ķ˿�ݔ�뷽���ʼ����
��ʼ���ꮅ���������_ʼ�Д�ѭ�Eģ�K�����gһ��������Sig4��ݔ����B(t��i)�Ƿ��0(���ƽ)�����Sig4��0���t�f��С܇�˕r̎�ں�ɫѭ�E��·�����gλ�ã�܇�d�������{(di��o)��С܇ֱ�ߺ���(sh��)������С܇ֱ���ɣ����Sig4����0���t�����M��ѭ�Eģ�K����߅�Ă�����Sig1�Ġ�B(t��i)�M���Дࡣ���Sig1��ݔ����B(t��i)��0(���ƽ)���t�f��С܇܇���F(xi��n)��̎�ںھ�����߅λ�ã�܇�d���������{(di��o)��С܇���D(zhu��n)����(sh��)�����Sig1��ݔ����B(t��i)����0,�t�M����һ����������ݔ����B(t��i)�Дࡣ���7����������ݔ����B(t��i)������0��܇�d�������t����С܇ֱ�ߡ�
�D4-4 ѭ�E�ӳ������̈D
4.4 �Z���������O(sh��)Ӌ���ƶ˵Ŀ�����ͨ�^SPI�����ķ�ʽ�������Z��ģ�K��䛷���������SPI��Ӣ�����Q��Serial Peripheral Interface���������O(sh��)�ӿ�SPI����Freescale��˾��ԭMotoroal��˾�댧(d��o)�w���������һ�N���ô���ͬ����ʽ��3����4��ͨӍ�ӿڣ�ʹ����̖��ʹ����̖��SS����ͬ���r犣�SCK����ͬ����(sh��)��(j��)ݔ���ݔ����MOSI��MISO������ SPI ģʽ�£���оƬ�M�и���ܲ������猦����惦��ַ�M��䛷ţ���ģ�Mͨ�����üĴ����M���x���ȡ�
ͨ�Ņf(xi��)�h
MOSI �Ĕ�(sh��)��(j��)�� SCLK���������M�����оƬ��MISO �Ĕ�(sh��)��(j��)�� SCLK���½����M������оƬ��8λ��һ�ֹ�(ji��)���Ȱl(f��)��λ��
4.4.1����ӳ����O(sh��)ӋISD����ӳ������̈D��D4-5��ʾ��
�D4-5 �Z������ӳ������̈D
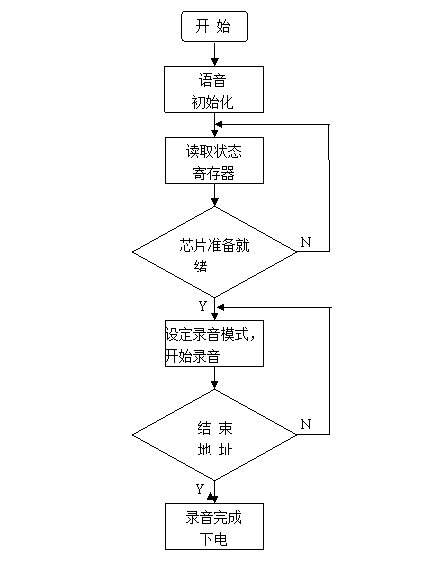
�ĈD4-5�п��Կ�����ISD����ӳ�������Ҫ���Z��ģ�K�M�г�ʼ���������Z��ģ�K�͆�Ƭ�C���B�ӵ�IO��PORTA.0~PORTA.3��ݔ��ݔ�������ʼ�����Z��ģ�K�ď�(f��)λ������Z��ģ�K��(n��i)�����Дࡣ
��ʼ����ɺ��_ʼ�xȡ��B(t��i)�Ĵ���������Z��оƬ�ʂ�;w���t�l(f��)�����ģʽָ�����ʼ��ַ�_ʼ����������Y(ji��)����ַ�Y(ji��)���������Ƭ�C�l(f��)�����ָ��o�Z��ģ�K������Z��оƬ�]�Мʂ��^�m(x��)���t������һֱ�xȡ�Z��оƬ��(n��i)���Ġ�B(t��i)��
4.4.2�����ӳ����O(sh��)Ӌ
�D4-6 �Z�������ӳ������̈D
�ĈD4-6�п��Կ�����ISD�����ӳ�������Ҫ���Z��ģ�K�M�г�ʼ���������Z��ģ�K�͆�Ƭ�C���B�ӵ�IO��PORTA.0~PORTA.3��ݔ��ݔ�������ʼ�����Z��ģ�K�ď�(f��)λ������Z��ģ�K��(n��i)�����Дࡣ
��ʼ����ɺ��_ʼ�xȡ��B(t��i)�Ĵ���������Z��оƬ�ʂ�;w���t�l(f��)�ͷ���ģʽָ�����ʼ��ַ�_ʼ�����������Y(ji��)����ַ�Y(ji��)����������Ƭ�C�l(f��)�����ָ��o�Z��ģ�K������Z��оƬ�]�Мʂ��^�m(x��)���t������һֱ�xȡ�Z��оƬ��(n��i)���Ġ�B(t��i)��
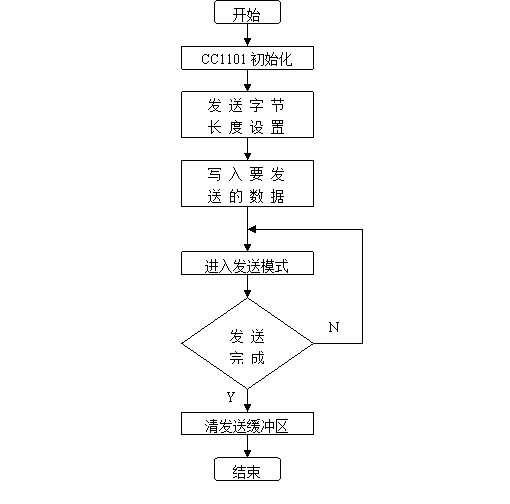
4.5 �o�������O(sh��)Ӌ4.5.1 �o���l(f��)���������O(sh��)Ӌ�o���l(f��)���ӳ������̈D��D4-7��ʾ��
�ĈD4-7�п��Կ������o���l(f��)���ӳ������Ȍ��o��ģ�KCC1101�M�г�ʼ���������o��ģ�K�Ϳ��ƶ˿������ӿڵ�PORTB.0~PORTB.3�Ķ˿�ݔ��ݔ����ʽ��ʼ����SPI��B(t��i)��ʼ�����o��ģ�K��늏�(f��)λ��ʼ��������CC1101��(n��i)�����Ĵ������o��ģ�K�l(f��)�书���O(sh��)�ó�ʼ����
��ʼ����ɺ� �O(sh��)���l(f��)���ֹ�(ji��)�L�ȣ�Ȼ����Ҫ�l(f��)�͵Ĕ�(sh��)��(j��)���M��l(f��)��ģʽ�l(f��)�͔�(sh��)��(j��)��Ȼ��z��l(f��)�͘�־λ�����Ƿ�l(f��)����ɣ�����l(f��)����ɣ��t��l(f��)�;��_�^(q��)������]�аl(f��)����ɣ��t���_ʼ�l(f��)�͔�(sh��)��(j��)��
�D4-7 �o���l(f��)���ӳ������̈D
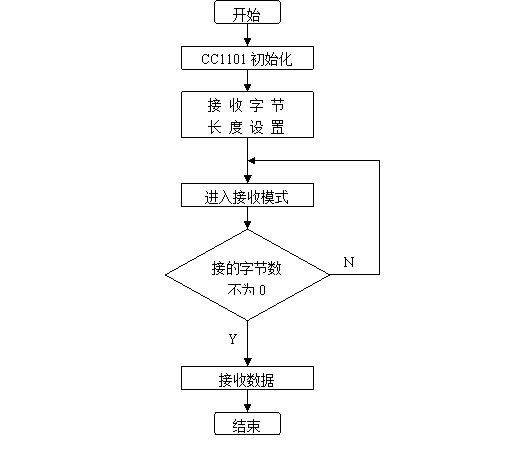
4.5.2 �o�������ӳ����O(sh��)Ӌ�o�������ӳ������̈D��D4-8��ʾ��
�D4-8 �o�������ӳ������̈D
�ĈD4-8�п��Կ������o���l(f��)���ӳ������Ȍ��o��ģ�KCC1101�M�г�ʼ���������o��ģ�K�Ϳ��ƶ˿������ӿڵ�PORTB.0~PORTB.3�Ķ˿�ݔ��ݔ����ʽ��ʼ����SPI��B(t��i)��ʼ�����o��ģ�K��늏�(f��)λ��ʼ��������CC1101��(n��i)�����Ĵ������o��ģ�K�l(f��)�书���O(sh��)�ó�ʼ����
��ʼ����ɺ� �O(sh��)�������ֹ�(ji��)�L�ȣ�Ȼ���M�����ģʽ��������յ��ֹ�(ji��)��0���tһֱ�ڽ���ģʽ�¡�������յ��ֹ�(ji��)��(sh��)����0���t�_ʼ���Ք�(sh��)��(j��)��������ɻ����վ��_�^(q��)��
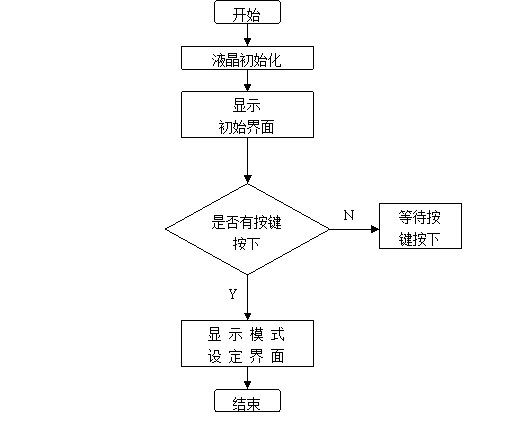
4.6 �@ʾ�ӳ����O(sh��)Ӌ�@ʾ�ӳ������̈D��D4-9��ʾ��
�D4-9 �@ʾ�ӳ������̈D
�ĈD4-10���Կ�����Һ���@ʾ�ӳ�������Ҫ��Һ��ģ�K�M�г�ʼ��������Һ�����ƶ˿ڡ�Һ����(sh��)��(j��)�˿ںͿ��������B�ӵ�IO��PE2~PE6��PC�ڵĶ˿�ݔ��ݔ�������ʼ����
��ʼ���ꮅ��Һ�����@ʾ��ʼ������Ϣ���@�r����������һ�����I���£��tҺ�����������Ϣ��Ȼ���@ʾģʽ�O(sh��)����Ϣ�����Iݔ������(y��ng)ģʽ������]�а��I���£��tҺ��һֱ�@ʾ��ʼ������Ϣ��
4.7 ���I�������O(sh��)Ӌ���I�ӳ�����D4-10��ʾ��
�ĈD4-10���Կ��������I�@ʾ�ӳ�������Ҫ���Iģ�K�M�г�ʼ���������I�Ϳ��ƶ˵Ŀ������Ľӿ�PD0~PD5�˿�ݔ��/ݔ�������ʼ����
��ʼ���ꮅ���_ʼ̎�����I�����Д��Пo���I���£�����(zh��)������(y��ng)�İ��I̎������
�D4-10 ���I�ӳ������̈D
��5�� ϵ�y(t��ng)�{(di��o)ԇ ��ϵ�y(t��ng)��(j��ng)�^���w�O(sh��)Ӌ�������Ӳ���_�l(f��)��ܛ���_�l(f��)��ͨ�^Ӳ����ܛ�������ϣ�ʹ������ϵ�y(t��ng)�����\�С�����һ�������Ŀ����һ��ϵ�y(t��ng)����K�_�l(f��)�ɹ������g��Ȼ�������ö��e�`������Ӳ�������ϵ��e�`��ܛ�������ϵ��e�`�ȣ��@����Ҫͨ�^�{(di��o)ԇ���l(f��)�F(xi��n)�e�`�����r�ĸ����e�`��ϵ�y(t��ng)�{(di��o)ԇ�֞�Ӳ���{(di��o)ԇ��ܛ���{(di��o)ԇ�ɂ����֡�
5.1 Ӳ���{(di��o)ԇӲ���{(di��o)ԇ�õ��Ĺ�����ʾ�������f�ñ���
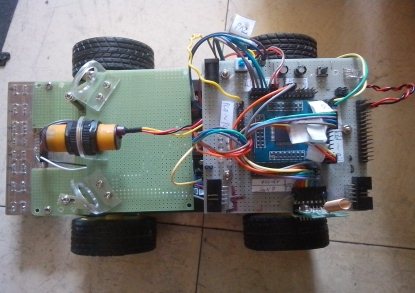
܇�d���ֵ�Ӳ������D�Ϳ��ƶ˵�Ӳ������D�քe��D5-1��5-2��ʾ��
�D5-1 ܇�dӲ������D
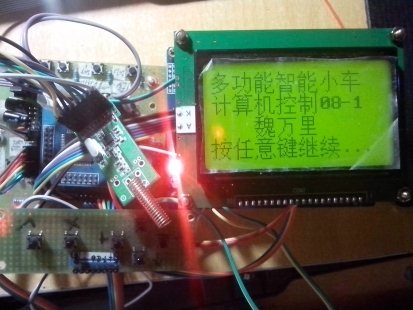
�D5-2 ���ƶ�Ӳ������D
Ӳ���{(di��o)ԇ��(y��ng)������4�����E�_ʼ��
1���鿴��·
����(j��)Ӳ���O(sh��)Ӌԭ��D���м��z�����·�����Ƿ����_�����`̓�����߶�·���}��
2���z����ϸ�Ԫ����
�z�����оƬ������Пo�������_���ПoоƬ��������r���F(xi��n)��
3���z���Դ�͵�
�Դ�͵���һ��ϵ�y(t��ng)�бز����ٵĽM�ɲ��֣�ͨ�֮ǰ������Ҫ���f�ñ��_�P(gu��n)�{(di��o)���yԇ���O�ܓ�λ��Ȼ��z���Դ�͵�֮�g���`��·���z�����ģ�K���Դ�͵��Ƿ��B��������
4����늙z��
�ڱ��C�Դ�͵ص��·�]�І��}����r�£���ͨ�Դ���z�����ģ�K�Ƿ����������`�l(f��)�ᡢ�l(f��)�C�F(xi��n)��l(f��)������Ҫ�r���������f�ñ�y��ϵ�y(t��ng)�·�е����������y������ܴt�f��ϵ�y(t��ng)�·���ж�·���߹��ϣ��˕r��(y��ng)�������_�Դ��Ȼ���м��z���·��
5��ϵ�y(t��ng)���w�z��
��늺z��ϵ�y(t��ng)�и���ģ�K��늉��Ƿ���������Ƭ�C����(y��ng)�����_ݔ��ݔ���ƽ�Ƿ������ȡ�
5.2 ܛ���{(di��o)ԇ���ڱ�ϵ�y(t��ng)���ԣ�ܛ������r��DҪ��̫�࣬����ܛ��������{(di��o)ԇ�@���ஔ(d��ng)?sh��)ğ���������������ʹ��C�Z�ԡ�
ܛ���{(di��o)ԇ�֞�����2�����E��
��1������ģ�K������{(di��o)ԇ
�ڱ�ϵ�y(t��ng)�O(sh��)Ӌ�в���CodeVisionAVR ܛ���������M�о��g���ġ�����AVRStudio4����ܛ����JTAG���ߌ������M�з����{(di��o)ԇ���z����Ĵ�����(n��i)ֵ�Ƿ��������ї���ַ�Ƿ�����ȡ�
2�����w�����{(di��o)ԇ������ģ�K�����{(di��o)ԇ�ꮅ����Ҫ�Ѹ���ģ�K���������B���������M��ϵ�y(t��ng)�����w�{(di��o)ԇ�������Ƿ��܌��F(xi��n)ϵ�y(t��ng)���A(y��)�ڹ��ܡ��ڴ��A�γ��F(xi��n)�Ć��}���Բ�ȡ�ڳ��F(xi��n)���}��ǰ���c��LED���ķ�ʽ�����_�����IJ��ֳ��F(xi��n)�Ć��}��
�Y(ji��)Փ���O(sh��)Ӌ���F(xi��n)�˶������С܇ϵ�y(t��ng)�Ĺ��ܡ���(d��ng)���Iݔ���O(sh��)���õ�ģʽ�r���M���Z����ʾ�����@ʾͬ���l(f��)����Ȼ��(j��ng)�^�o����ݔ��ģʽ�ִa�l(f��)�ͽo܇�d�������ˣ�Ȼ��܇�d����������(j��)���յ���ģʽ�ִa������С܇�����F(xi��n)ѭ�E���o���b�ع��ܡ�����]���յ��o����̖�����յ��ğo����̖��ֹͣģʽ�ִa���t܇�d����������С܇̎��ֹͣ�ȴ���B(t��i)��
����С܇ϵ�y(t��ng)��Ҫ��(y��ng)���c�h(hu��n)���O(ji��n)�غ͙z�y��܇�w�h(hu��n)���ęz�顢܊���ϵ��ű����ȡ���һ���漰���I(l��ng)���W(xu��)�ƵĹ��̡�
��ϵ�y(t��ng)�����c�ǣ����ßo����ݔ?sh��)�ģʽ��ͨ�^���ƶ˿���܇�d���������^��ͨ�^܇�d����������С܇���������˺�܇�w��ֱ�ӽ��|�������˿��Ƶ��`���ԣ�ͻ���˿��g�����ơ�����ϵ�y(t��ng)Ҳ�о����ԣ����ڲ��õ��ǟo����ݔ?sh��)ķ�ʽ���κΟo���O(sh��)�䣬�䷀(w��n)���Ժ͂�ݔ���x�϶���һ�������ƣ����o���O(sh��)����Ч��ݔ���x�ڿՕ�؎���100�����ң����⣬�S�����x�����ӣ���ϵ�y(t��ng)�Č��r�Կ��Ʒ��棬Ҳ����һ���̶ȵ��t���F(xi��n)����F(xi��n)��
�ڮ��I(y��)�O(sh��)Ӌ�^���У�얹����ڴ�W(xu��)4���(n��i)�W(xu��)�^��֪�R�������dž�Ƭ�C��ģ�M��ӷ����֪�R��ͬ�rͨ�^�@�ή��O(sh��)����ˆ�Ƭ�C���̵������������ǫ@�õ�ܛ���{(di��o)ԇ��(j��ng)ͬ�r�ӏ����ҵČ��H����������ͬ�rҲ�Լ����ӵ�֪�����Լ�֪�R�I(l��ng)����IJ����ȱ�ݡ�
���ڕr�g̫�}�٣���(j��ng)�㣬��Փ����Ҳ����(y��ng)�Ĵ��ڲ��㣬���ϗl�����ޣ��Դ�����һЩ�O(sh��)Ӌ����Ć��}�����˼���Ҳ�д���ߡ���Փ֪�R߀Ҫ얹̼ӏ���
�� �x���n�}���x�}���о��^���еõ��T�ώ���Ϥ��ָ��(d��o)���T�ώ����ԃ���о��M�̣�������ָ�c�Խ������_���о�˼·�������c�ܡ�����Ą�T�ώ�һ�z��ƈ�����L(f��ng)����֔�đB(t��i)�ȣ�̤̤�����ľ����H�������ģ����ҽ������ˣ��m�v�r���꣬�s�o�ԽK������o�F֮�������T�ώ��ĸм�֮���ǟo�������Z���_�ġ�
��Փ�ļ������֮�H���ҵ�����o��ƽ�o�����_ʼ�M���n�}��Փ�ĵ������ɣ��ж��ٿɾ��Ď��L��ͬ�W(xu��)�����ѽo���ҟo�ԵĎ��������@��Ո�������\�����x�⣡
�� � һ�� � ��늙C�(q��)���^�ļ���C�ļ����a
������Word��ʽ�ęn51�����d��ַ����Դ�a����
 ����С܇���I(y��)�O(sh��)Ӌ.doc
(3.98 MB, ���d��(sh��): 53)
����С܇���I(y��)�O(sh��)Ӌ.doc
(3.98 MB, ���d��(sh��): 53)
2018-5-23 14:40 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
����: chendaying �r�g: 2021-6-27 18:47
�x�x�������Ѱ��x��

����: sh-fluke �r�g: 2021-8-9 06:36
�x�x���������d���x��
| �gӭ���R (http://m.zg4o1577.cn/bbs/) |
Powered by Discuz! X3.1 |
��վ֩���ģ�壺
亚洲成人一区二区
|
99视频免费|
日韩精品久久久久
|
欧美精品v
|
国产高清精品一区二区三区
|
国产精品久久久久久久久久久久久
|
欧美伊人久久久久久久久影院
|
99在线播放
|
91亚洲国产成人久久精品网站
|
久久99精品久久久久久
|
欧美男人天堂
|
日韩久久中文字幕
|
毛片久久久
|
久久久久久免费毛片精品
|
草草草网站
|
成人一区av|
成人小视频在线观看
|
久久免费视频在线
|
国产免费xxx
|
国产探花在线精品一区二区
|
国产乱码精品1区2区3区
|
日韩一区二区福利
|
久久久久久毛片免费观看
|
91精品国产91久久久久久密臀
|
四虎影
|
久久高清|
欧洲精品码一区二区三区免费看
|
97精品国产手机
|
天天操夜夜骑
|
国产一级在线
|
日日夜夜草
|
粉嫩一区二区三区国产精品
|
亚洲国产一区二区视频
|
奇米视频777
|
亚洲精品短视频
|
蜜桃臀av一区二区三区
|
www亚洲免费国内精品
|
一区二区三区四区免费在线观看
|
欧美色影院
|
日韩福利
|
欧美一区二区在线播放
|