標(biāo)題: 雙足機器人走路步態(tài)說明 [打印本頁]
作者: augestclown 時間: 2018-7-16 17:53
標(biāo)題: 雙足機器人走路步態(tài)說明

0.png (40.07 KB, 下載次數(shù): 132)
下載附件
2018-7-17 01:47 上傳
機器人走路步態(tài)說明
3.1 人形機器人關(guān)鍵步態(tài)確認(rèn) ;重心左移:機器人由原先站立狀態(tài)重心做移,使機器人的中心在左腳板上,左腳受力支撐全身,右腳離地。實現(xiàn)方法:通過調(diào)節(jié)雙腳的腰部舵機1和足舵機2使機器人達到如下圖所示位置。其原理類似正方形變成平行四邊形的過程。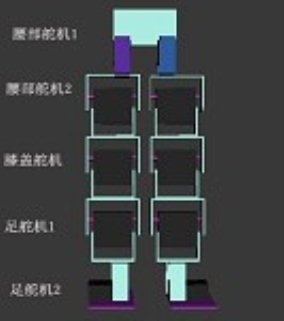
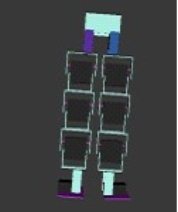

②右腳腳跨出:在重心落在左腳的情況下,右腳向前跨出。實現(xiàn)方法調(diào)節(jié)要不舵機2和足舵機1.出于對步態(tài)平滑性的考慮注意右腳腳板與地面的平行,這樣能是步態(tài)更看起來更簡單;
右腳著地:同坐左腳腰部舵機2與舵機1的調(diào)節(jié)使機器人達到如下圖所示位置,使機器人右腳著地,實現(xiàn)第一步的跨出。跨出步長不是越大越好,步長太大容易造成前進過程中重心移動太遠造成不穩(wěn)定。也不宜太小,沒有效率。所以我在調(diào)試過程中得到的最佳步長為二分之一的腳6CM。
(圖15)④中心左偏:通過腰部舵機1足舵機2 的調(diào)試使機器人重心右偏,將機器人重心落在機器人左腳。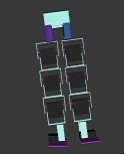
⑤跨出左腳:在上一圖的基礎(chǔ)上調(diào)節(jié)左腳的腰部舵機2足舵機1使機器人左腳跨出。
(圖17)&左腳著地:原理同右腳著地。
重心左移右腳收回:通過腳步舵機1足舵機2實現(xiàn)重心的左移,然后收回右腳,使其與圖13位置一樣,這樣就實現(xiàn)了連續(xù)前進,而不是每一步都從立正開始立正結(jié)束,使機器人的行走更擬人更自然。這里其實只要做到重心左移這個動作就已經(jīng)完成了,只要循環(huán)這個動作組他就能循環(huán)到動作圖13的位置實現(xiàn),雙足的循環(huán)前進這一過程。 這里要說明下為什么動作組要從重心偏移開始,因為機器人原先是站立的,從重心偏移開始行走能更自然的開始行走這是完全仿人的行走方式。
說明:
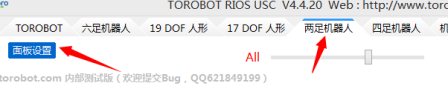
安裝驅(qū)動- 打開電腦軟件,聯(lián)機
- “面板設(shè)置”
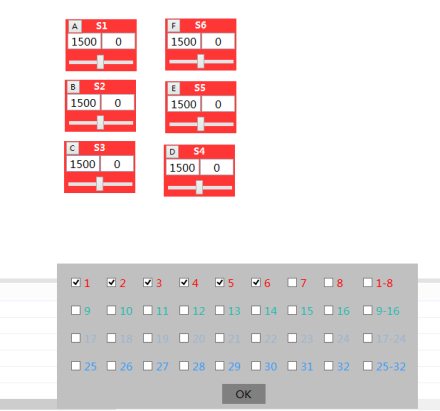
去掉不要的舵機面板,并且移動面板,使得形狀排列和機器人相似。
拖動每個舵機面板的滑條,使得機器人處于站立的姿態(tài)。(雙腳是直的,沒有彎曲,腳板完全接觸地面)
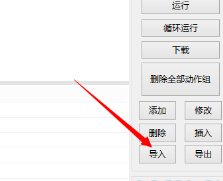
調(diào)整完機器人的狀態(tài)之后,將該狀態(tài)設(shè)置為初始位置
(每一個機器人的初始狀態(tài)是不一樣的,所以需要調(diào)整一下)
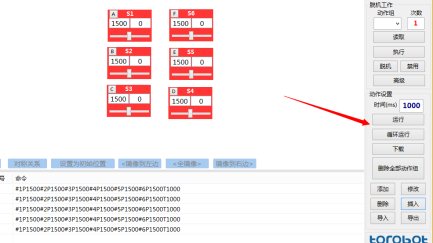
導(dǎo)入之后,點擊右側(cè)的“運行”,是運行一次
點擊“循環(huán)運行”,是循環(huán)運行,直到點擊“停止”才會停止。
在第六步中,如果在線調(diào)試動作,測試動作完全正確之后,可以下載動作組到舵機控制板中了。
點擊右側(cè)的“下載”,開始下載動作組。
下載完了會提示下載成功,并且提示一個編號如 NO.1,意思就是說剛才下載的是動作組編號是1。
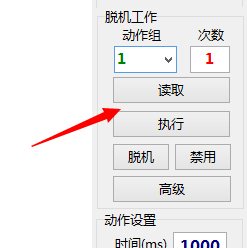
下載完成之后,執(zhí)行指定的動作組。
首先點擊“讀取”,然后選擇需要執(zhí)行的動作組編號,然后輸入執(zhí)行次數(shù),然后點“執(zhí)行”,就會執(zhí)行你設(shè)置的動作組。
脫機的意思是脫離電腦,執(zhí)行動作組
設(shè)置方法如下:
首先點擊“讀取”,然后選擇需要執(zhí)行的動作組編號,然后輸入執(zhí)行次數(shù),然后點“脫機”,就會把你選擇的動作組設(shè)置為脫機自動執(zhí)行(就是說舵機控制板上電的時候自動執(zhí)行)
注意:執(zhí)行次數(shù)不宜太長,否則會影響電腦軟件聯(lián)機,因為脫機執(zhí)行的過程中,電腦是無法聯(lián)機使用的,必須要等執(zhí)行完畢才可以聯(lián)機
全部資料51hei下載地址:
 雙足機器人 程序.zip
(170.4 KB, 下載次數(shù): 109)
雙足機器人 程序.zip
(170.4 KB, 下載次數(shù): 109)
2018-7-16 17:52 上傳
點擊文件名下載附件
程序
下載積分: 黑幣 -5
 部分程序.rar
(2.25 KB, 下載次數(shù): 59)
部分程序.rar
(2.25 KB, 下載次數(shù): 59)
2018-7-17 01:51 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
作者: 無限1417 時間: 2018-9-9 12:29
請問這個軟件叫什么名字啊?
作者: 快樂眼淚 時間: 2018-10-5 19:51
什么時候才能學(xué)到樓主的水平啊!
作者: rockshadowa 時間: 2018-10-22 23:05
還是通過上位機調(diào)參數(shù),步態(tài)平衡的問題還是沒有解決,還是開環(huán)的系統(tǒng)
作者: ye3ye3ye3 時間: 2018-12-5 11:56
感謝分享
作者: ziw 時間: 2019-2-27 09:21
你好,你這個指令中的正負(fù)數(shù)是什么意思啊??
作者: 18943319219 時間: 2019-3-31 16:54
你好,請問你這個機器人的結(jié)構(gòu)可以告訴一下嗎
作者: hzmdqllf 時間: 2019-9-13 16:42
加油加油!!!
作者: iwfcy51hei 時間: 2019-10-9 13:20
舵機一直抖怎么辦?
作者: beisheng 時間: 2019-11-21 16:50
加油加油,多多支持
作者: jambillking 時間: 2019-12-4 14:38
是arduino的么???
作者: jambillking 時間: 2019-12-4 14:39
上位機的,串行總線舵機么、???什么型號??
作者: pengpai 時間: 2019-12-11 16:34
感謝分享
作者: 3233635736 時間: 2020-9-23 21:45
為啥里面都是亂碼呀
作者: 李die 時間: 2023-5-20 23:49
這是什么軟件
作者: haide1998 時間: 2024-5-5 09:03
路過學(xué)習(xí),謝謝分享!
| 歡迎光臨 (http://m.zg4o1577.cn/bbs/) |
Powered by Discuz! X3.1 |
主站蜘蛛池模板:
欧美成人精品欧美一级
|
欧美日本在线
|
午夜久久av
|
色综合天天综合网国产成人网
|
欧美一区二区三区在线观看
|
午夜电影网
|
91精品国产综合久久久动漫日韩
|
欧美精品一二三
|
四虎永久免费在线
|
欧美a级成人淫片免费看
|
久久成人精品视频
|
人人看人人搞
|
日韩精品免费一区二区在线观看
|
毛片大全
|
аⅴ资源新版在线天堂
|
三级在线免费观看
|
免费a网
|
美女在线视频一区二区三区
|
91av在线看|
亚洲精选久久
|
成人综合一区
|
毛片在线看片
|
91久久|
伊人网综合在线
|
大伊人久久
|
欧美成人精品一区二区男人看
|
最新免费视频
|
男人天堂免费在线
|
91大神在线看
|
国产不卡视频
|
久久精品国产精品青草
|
一区二区成人
|
日韩欧美国产不卡
|
成人久久18免费网站麻豆
|
男女在线网站
|
国产精品久久久久久久久免费桃花
|
国产在线中文字幕
|
亚洲精品一区二区三区蜜桃久
|
wwwxxx国产|
成人福利在线
|
国产免费av在线
|