��(bi��o)�}: С܇���E�E���O(sh��)Ӌ���(�O(sh��)Ӌ˼·�cӲ��������?q��)��F(xi��n)Ԕ��) [��ӡ���]
����: zzp2066970838 �r�g: 2018-10-24 00:04
��(bi��o)�}: С܇���E�E���O(sh��)Ӌ���(�O(sh��)Ӌ˼·�cӲ��������?q��)��F(xi��n)Ԕ��)
С܇���E�E���O(sh��)Ӌ���
һ���O(sh��)Ӌ˼·��
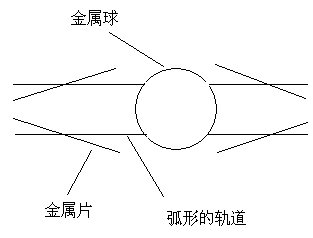
�����}ĿҪ������Ҫ�����������ڽǶȵĂ��������҂��]��ʹ���Ј����ṩ��ˮ�y��������߸����ĽǶȂ���������������С��܉���Լ����F(xi��n)��һ������ƽ��x��
ƽ��x��ԭ��������С��đT�ԣ���(d��ng)С܇��(g��u)��ij���ǶȵăAб�ĕr��С�����T���_(d��)��܉��һ�ˣ���ʹ���m��(d��ng)?sh��)�λ�Â��������D(zhu��n)�Q�����̖ݔ���o��Ƭ�C(j��)��
��Ƭ�C(j��)�յ���̖�����_�J(r��n)���{(di��o)��늙C(j��)��С܇λ���M(j��n)���{(di��o)������С܇���E�E���Ϸ���(f��)�{(di��o)��λ�ã��ƽ�ƽ���c��ֱ��܉������ˮƽ����С܇���_(d��)ƽ���c��
���w�C(j��)е�͂����������F(xi��n)����Ҋ����С��(ji��)��
�����C(j��)е���֣�
�C(j��)е��늲��֣��@������2���������քe��С܇�ṩƽ�����Ϣ����ֱ������Ϣ��
- ƽ��x���@���@�ι������P(gu��n)�I���֣����O(sh��)Ӌ�����Č��F(xi��n)�����S���r�g���O(sh��)Ӌ��Ŀ��(bi��o)��ƽ��x�ṩǰ�A����A��ƽ��3�Nλ����Ϣ��ͨ�^���Ʒ���2�N�O(sh��)Ӌ��������������ƽ��x��������
����1�����҈D��ʾ�����ý�����ʹ�Ãɂ�����Ƭֱ�ӌ�(d��o)ͨ���������o���·���F(xi��n)��̖�Ă��f����(j��ng)�^�����Č��@һ�����ͱ���Q���ˣ�ԭ���ж���1���յ���(d��o)܉�����ƣ�С����yͬ�r���|���ɂ�����Ƭ��2���o������С��ͽ���Ƭֱ�ӵķǏ�����ײ����̖����(w��n)�������˽�Q�@�ɂ����}���҂��O(sh��)Ӌ�˵ڶ��N������
����2��܉��������4Ƭ����Ƭ�M�ɣ���܉�����g����Ϳ�Ͻ^����Ϳ�ӣ��zˮ������(d��ng)С������߅����߅�ĕr���Ƭ���پ�̎�ڷ�(w��n)���Č�(d��o)ͨ��B(t��i)���@�Ӿͽ�Q�˷���1�ăɂ����}���ڌ��H�����в��õ��ǿɘ���Ƥ�����yԇ�r�l(f��)�F(xi��n)�Ї�(y��n)�صĽ��|�����Ć��}���y���X�����ӵ��P(gu��n)ϵ��������FƬ��Ԓ��(y��ng)ԓ�Ϳ����ˣ������ѽ�(j��ng)��܉���Ļ��A(ch��)�ϣ��҂��O(sh��)Ӌ�˵����N������
����3�����ðl(f��)����O�ܺ������O�܌�����fС���λ����̖����(d��ng)С���ס�⾀�r���������O�ܞ���裬�]��ס�r����裬�����ЛQ�·�����̖���D(zhu��n)�Q�͂��f����F(xi��n)�����@��������
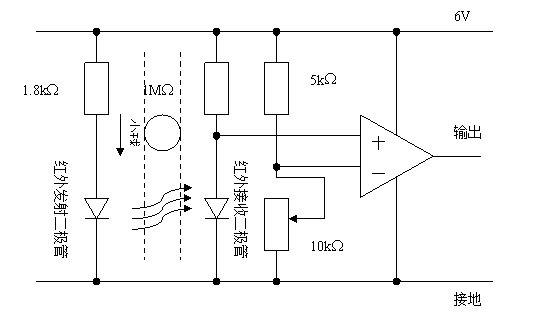
 ܇ǰ�����ɃɽM�l(f��)�⡢�������O�ܽM�����Y(ji��)��(g��u)���҈D��ʾ���ɂ����O�ܳ�һ���ĽǶ��������R�淴��⾀�Ľ��գ��ɂ����ָ��^��Ȼ���Լ�ֱ�����䡣�ɽM���c���Ϻھ���ϣ��������յ��ھ��t��ʾ܇��ƫ����֮�t��ƫ������(j��)�������O����ֵ׃���������ЛQ�·�����̖���D(zhu��n)�Q�͂��f����y�аl(f��)�F(xi��n)С܇�ęC(j��)е��(w��n)������o��܇ǰ��У��(zh��n)��
܇ǰ�����ɃɽM�l(f��)�⡢�������O�ܽM�����Y(ji��)��(g��u)���҈D��ʾ���ɂ����O�ܳ�һ���ĽǶ��������R�淴��⾀�Ľ��գ��ɂ����ָ��^��Ȼ���Լ�ֱ�����䡣�ɽM���c���Ϻھ���ϣ��������յ��ھ��t��ʾ܇��ƫ����֮�t��ƫ������(j��)�������O����ֵ׃���������ЛQ�·�����̖���D(zhu��n)�Q�͂��f����y�аl(f��)�F(xi��n)С܇�ęC(j��)е��(w��n)������o��܇ǰ��У��(zh��n)��
����Ӳ�����֣�
��ԇ��Ӳ��������Ҫ���������֣�
��늲��ֵ��Դ��8V��ֱ�ӹ��o늙C(j��)���衣��һ���ֽ�(j��ng)�^�։����o����T����늉���
����(j��)����T���ԣ������Ҫ6V���ɣ��ʸ���(j��)���Y(ji��)������(li��n)�l(f��)����O�ܣ����Է։�2V��ͬ�r�ṩ����T�������ָʾ����
2������T�·���֣�
����T������Ҫ�·���ṩһ���T��늉��ЛQ�T�������С��(j��ng)�^����T������(j��)늉�׃��ݔ����̖��������Ƭ�C(j��)��
���w�·���D��ʾ��
- �ɂ�����T��ݔ���B�ӵ���Ƭ�C(j��)��P0��P1�_����D��ʾ��

�D01Ƭ1.png (566.88 KB, ���d�Δ�(sh��): 72)
���d����
2018-10-24 00:04 �ς�
�ġ����֣�
1������С܇���E�E��IJ������£�
����ǰ�_��ֱ���^ƽ���c���������õ��Ġ�B(t��i)��̖�l(f��)����׃��Ȼ��С܇��׃���M(j��n)���Ğ�����_�������ٶ���������ֱ����������B(t��i)�ٴθ�׃���f�����^��ƽ���c���˕rС܇�ٴθ�׃���p�١��؏�(f��)������^��ֱ��С܇������١��@�����Ǵ��¶�λ��
���С܇�������������(j��)�������Ġ�B(t��i)�Q�����M(j��n)�����{(di��o)��λ�ã�ÿ���M(j��n)һ���r�g��ͣһ�£�ʹ�����������_��ʾС܇��B(t��i)����(j��ng)�^�״��{(di��o)����ͣ�£����F(xi��n)���_��λ��
2��С܇����ľ��w���F(xi��n)��
����?q��)�С܇�R�_(d��)�Ŀ������ɕr�g�Д��팍�F(xi��n)�ġ�С܇���ٶ��c������{(di��o)��(ji��)�����{(di��o)��(ji��)ݔ����pwm�����F(xi��n)����ÿ���r��Д࣬ݔ��pwm�������R�_(d��)������(j��)С܇��(y��ng)���ٶ��c����Q��ݔ��pwm��̖�ĸߵͣ�ʹ�R�_(d��)��һ���ĕr�g��(n��i)����һ�Εr�g��ͣһ�Εr�g��
����Ă���������Ҳ���ɕr�g�Д����F(xi��n)��ÿ��һ���r�g������?q��)��������ɘ�һ�Ρ����ڂ������ǙC(j��)е�Y(ji��)��(g��u)����(d��o)����������̖ë���^�࣬�ʳ�����ýy(t��ng)Ӌ�k����ë�̡��y(t��ng)Ӌһ���r�g��(n��i)�IJɘ���̖��ͻ���T��ֵ�Ġ�B(t��i)���鮔(d��ng)ǰ��B(t��i)�����]��ͻ���T��ֵ�Ġ�B(t��i)���t����ԭ��B(t��i)��׃��
����IJ��Բ����ڸ���(j��)�������{(di��o)��(ji��)�ٶȵIJ����F(xi��n)��ͨ�^С܇��̎��B(t��i)��Q������IJ��ԣ��{(di��o)���ٶ��c����
�塢��Ʒ���Y(ji��)����
�C�������������֣��҂����С܇��Ʒ��
���Y(ji��)����С܇���������E�E���ϣ����܉�������һ���ҵ�ƽ���c���҂��{(di��o)����С܇���ȣ�С܇�܉���������ƽ�ƽ���cλ�á�
�ڟo�����E�E���ϣ�С܇Ҳ�����Ό���ƽ�⣬�������������ʾ�ҵ�ƽ���c��
���������ڵĆ��}��
1���E�E��]�����ᡣ����E�E����L���������D(zhu��n)�ӑT���e����С܇����ƽ��λ�Õr�����E�E�����������ã������E�E�������ʎ��
���]�����ᣬ���D(zhu��n)�ӑT���e����ʎ���yֹͣ���@���F(xi��n)���ڼ����ؕr�Ȟ����@����ʹС܇���_(d��)ƽ��λ�ã��E�E����Ȼ�����C�����δƽ������`��(d��o)С܇��ʹС܇�o����(zh��n)�_�����Дࡣ
��Q��������ѽ�Q�����Ǟ��E�E��������ᡣ�ڌ���җl���o���M�㣬�҂��ڳ����ϼ�����һ���ı��o(h��)�����@�N��r�������P(gu��n)�Д࣬��ʾС܇������K�{(di��o)���Ք���ƽ���c��
2��С܇���Ӽ��ٶȡ�С܇���Ӽ��ٶȺܴ���Ҫ��ԓ늙C(j��)�c݆�Ӳ�ƥ�䡣݆���D(zhu��n)�Ӵ��ڹ����T�ޣ�ֻ���_(d��)��һ�����ʲ��܆���С܇���@ʹ��С܇�o������ǰ�M(j��n)��������{(di��o)�r���o�����_�ҵ�ƽ��λ�á�ͬ�r���Ӽ��ٶȐ������E�E���D(zhu��n)�ӑT�����}�������ṩ�����ء�
��Q������ʹ�ø��õ�܇݆����ʹ���Ď����X݆�M����F(xi��n)��܇݆�����ڌ���җl���͕r�g���ڱ�����Л]�Ќ��F(xi��n)��
������Word��ʽ�ęn51�����d��ַ��
 С܇���E�E���O(sh��)Ӌ���.doc
(396.5 KB, ���d��(sh��): 8)
С܇���E�E���O(sh��)Ӌ���.doc
(396.5 KB, ���d��(sh��): 8)
2018-10-24 00:04 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
| �gӭ���R (http://m.zg4o1577.cn/bbs/) |
Powered by Discuz! X3.1 |
��վ֩���ģ�壺
亚洲欧美激情精品一区二区
|
免费h视频|
久久精品|
亚洲一区二区视频在线播放
|
亚洲国产成人精品久久
|
国产成视频在线观看
|
国产福利资源在线
|
欧美久久久久久久久
|
欧美在线一区二区三区四区
|
一级a性色生活片久久毛片
一级特黄a大片
|
欧美精品一区二区在线观看
|
国产精品久久久久久久久久免费看
|
a在线观看免费
|
成人免费观看网站
|
日韩视频国产
|
亚洲成人综合网站
|
色网站在线
|
亚洲欧美日韩国产综合
|
中文字幕乱码一区二区三区
|
91一区
|
99国内精品|
91在线免费视频
|
国产三级
|
欧美日韩一区在线播放
|
www.国产91|
99精品国自产在线观看
|
91免费观看国产
|
久久久久亚洲av毛片大全
|
黄色骚片|
国产精品一区二区久久
|
国产精品久久久久久久久久久久久
|
一级片免费在线观看
|
精品国产一区探花在线观看
|
亚洲精品www久久久久久广东
|
国产高清在线观看
|
久久国产精品一区二区三区
|
国产不卡视频
|
亚洲激情视频在线
|
免费一级欧美在线观看视频
|
午夜免费小视频
|
av 一区二区三区
|