|
發布時間: 2016-4-10 02:43
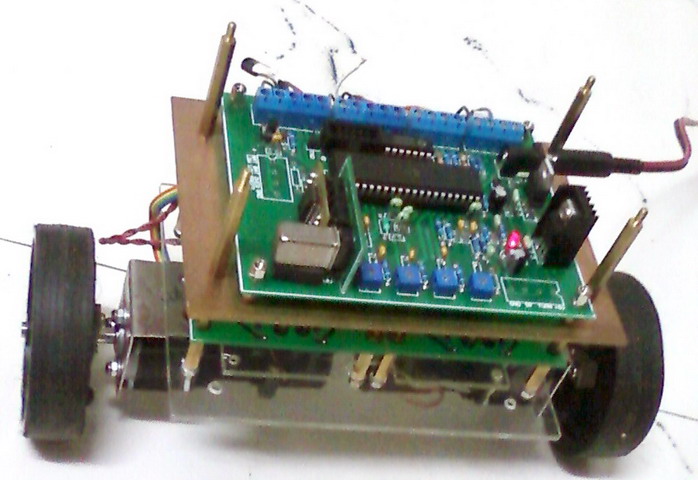
正文摘要:控制器:ATmega16;8MHz; 加速度傳感器:MMA2260;陀螺儀:EWTS82; 傳感器的融合:卡爾曼濾波; 馬達:EN_2342CR(速比64)+雙路12脈沖編碼器+CD40106對信號整形; 驅動板芯片:CD4001+IR2111+IRF1404(驅動電 ... |
常用計算方法有兩種:互補濾波和卡爾曼濾波;都可以輸出校正后的角度與角速度;我采用的是卡爾曼濾波,考慮到單片機的運算能力,是經過精簡的,當然這些都是老外做的,關于卡爾曼濾波,我找了很多資料,較好的如下: Kalman Filter Tutorial for Balancing Robot.pdf
(76.47 KB, 下載次數: 15)
kalman_intro_chinese.pdf
(539.84 KB, 下載次數: 10)
Kalman Filter Tutorial for Balancing Robot.pdf
(76.47 KB, 下載次數: 15)
kalman_intro_chinese.pdf
(539.84 KB, 下載次數: 10)
互補濾波如下:點擊此處下載  filter.rar
(1.22 MB, 下載次數: 12)
filter.rar
(1.22 MB, 下載次數: 12)
我覺得卡爾曼的效果很好,但是初期有較大波動,要經過一段時間才能穩定; http://www.docin.com/p-52169676.html 這個地方的可供參考; |
 收藏
收藏 頂
頂 踩
踩

