|
�l(f��)���r(sh��)�g: 2017-5-6 21:23
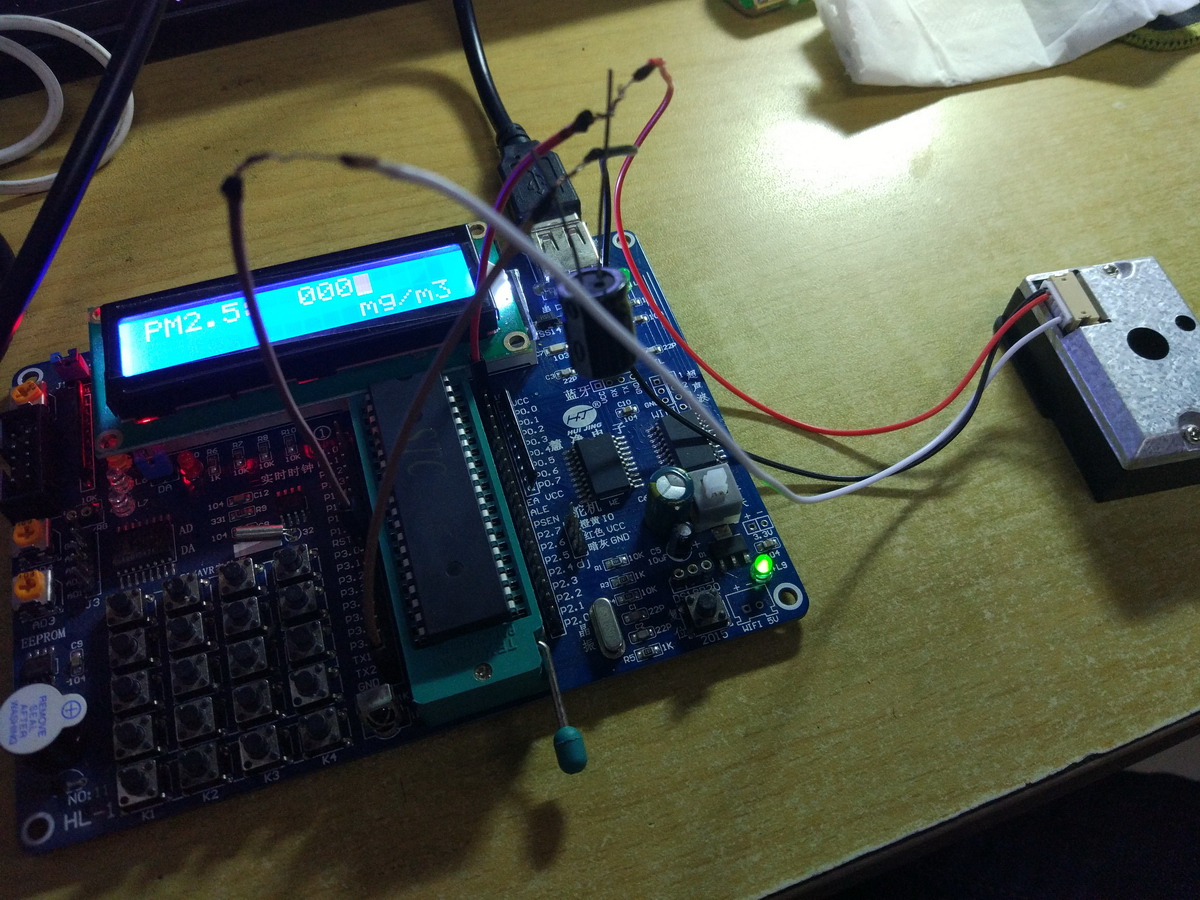
����ժҪ:��������Ƭ�C(j��)����RXD����ֱ���B������ݔ����TXD���D |
| �������ӹ�����x |
| ���ԣ���Ҫע����ƽ�Ƿ�����ͬ߉�ƽ���粻ͬ��Ҫʹ���ƽ�D(zhu��n)�QоƬMAX232�ȡ� |
| һ���ǿ��Ե� ���w����l(f��)һ�ɂ�(g��)����̖(h��o) |
| ok ��Ӌ(j��)�dz���Ć��}�� ���ٿ��� |
|
ݔ����TTL���ƽ����ͬ־���ܿ������@�����Dz�����ʲô���}�� #include<reg52.h> #define uchar unsigned char #define uint unsigned int void senddata(uchar dat); uchar cal [7]= {0};// cal[0]:��ʼλ 0xAA // cal[1] : Vout(H) // cal[2] : Vout(L) // cal[3] : Vref(H) // cal[4] : Vref(L) // cal[5] : У�(y��n)λ // cal[6] : �Y(ji��)��λ OxFF float Vo; int i=0; sbit rs=P1^0; sbit lcden=P2^5; sbit rw=P1^1; sbit voice=P2^3; sbit light=P2^2; uchar buf,sum,count; uchar num,TV,a,b,c; void delay(uint z) { uint x,y; for(x=z;x>0;x--) for(y=110;y>0;y--); } void write_com(uchar com) { rs=0; rw=0; P0=com; delay(5); lcden=1; delay(5); lcden=0; } void write_data(uchar date) { rs=1; rw=0; P0=date; delay(5); lcden=1; delay(5); lcden=0; } void init() { lcden=0; //ʹ�ܶ˞���ƽ write_com(0x38); /*�@ʾģʽ�O(sh��)�� 00111000 �O(sh��)��16*2�@ʾ 5*7�c(di��n)� 8λ��(sh��)��(j��)�ӿ�*/ write_com(0x0f); /*�@ʾ�_�P(gu��n)�����(bi��o)�O(sh��)�� 00001DCB D=1���_�@ʾ D=0�� �P(gu��n)�@ʾ C=1���@ʾ���(bi��o) C=0�����@ʾ���(bi��o) B=1�����(bi��o)�W�q B=0�����(bi��o)���W�q*/ write_com(0x06);//��ַָ��Ԅ�(d��ng)+1�ҹ��(bi��o)+1�����ַ���Ļ����(hu��)�Ƅ�(d��ng) write_com(0x01); write_com(0x80); write_data ('P'); write_com (0x81); write_data ('M'); write_com (0x82); write_data ('2'); write_com (0x83); write_data ('.'); write_com (0x84); write_data ('5'); write_com (0x85); write_data (':'); write_com (0xcb); write_data ('m'); write_com (0xcc); write_data ('g'); write_com (0xcd); write_data ('/'); write_com (0xce); write_data ('m'); write_com (0xcf); write_data ('3'); } void warn() { if (num>=200) { voice=0; light=0; } } void main() { init(); SCON=0x50; //�O(sh��)�����ڹ�����ʽ PCON=0x00; //�����²����� TMOD=0x20; //���r(sh��)��1������8λ�Ԅ�(d��ng)���d�Mʽ�����ڮa(ch��n)�������� EA=1; ES = 1; //���S�����Д� TL0=0x80; TH0=0xFB; TR0=1; num=TV; a= TV /100+0x30; TV %=100; b= TV /10+0x30; TV %=10; c= TV +0x30; write_com (0x88); write_data (a); write_com (0x89); write_data (b); write_com (0x8a); write_data (c); //warn(); while(1); } void serial() interrupt 4 { ES = 0; //�P(gu��n)�]�����Д� RI = 0; //������н��ܘ�(bi��o)־λ buf = SBUF; //�Ĵ��ھ��_�^(q��)ȡ�Ô�(sh��)��(j��) senddata(buf); ES = 1; //���S�����Д� } void senddata(uchar dat) {if(dat==170) //�Д���ʼλ OxAA, (0xAA==l70�� { i=0; cal[i]=dat; } else { i=i+1; cal[i]=dat; } if(i==6) { sum= cal[1]+cal[2]+cal[3]+cal[4];//sum=Vout(M)+Vout(L)+Vref(M)+Vref(L) } if (sum == cal [5] && cal[6]==255) //sum�cУ�(y��n) ��ͬ &&���һλ�� OxFF �Y(ji��)��λ { for (i=0; i <=6; i++) //��̎forѭ�h(hu��n)���@ʾ�����Д�(sh��)��(j��)����cal [7]�еĔ�(sh��)��(j��) { SBUF=cal[i]; while(!TI); TI=0; } Vo=(cal[1]*256+cal[2])/2048*5; TV=3000* Vo; } } |
|
��������TTL���ƽ�ţ����y�������@�������e(cu��)�`�����?gu��)�æ�����?br />
#include<reg52.h> #define uchar unsigned char #define uint unsigned int void senddata(uchar dat); uchar cal [7]= {0};// cal[0]:��ʼλ 0xAA // cal[1] : Vout(H) // cal[2] : Vout(L) // cal[3] : Vref(H) // cal[4] : Vref(L) // cal[5] : У�(y��n)λ // cal[6] : �Y(ji��)��λ OxFF float Vo; int i=0; sbit rs=P1^0; sbit lcden=P2^5; sbit rw=P1^1; sbit voice=P2^3; sbit light=P2^2; uchar buf,sum,count; uchar num,TV,a,b,c; void delay(uint z) { uint x,y; for(x=z;x>0;x--) for(y=110;y>0;y--); } void write_com(uchar com) { rs=0; rw=0; P0=com; delay(5); lcden=1; delay(5); lcden=0; } void write_data(uchar date) { rs=1; rw=0; P0=date; delay(5); lcden=1; delay(5); lcden=0; } void init() { lcden=0; //ʹ�ܶ˞���ƽ write_com(0x38); /*�@ʾģʽ�O(sh��)�� 00111000 �O(sh��)��16*2�@ʾ 5*7�c(di��n)� 8λ��(sh��)��(j��)�ӿ�*/ write_com(0x0f); /*�@ʾ�_�P(gu��n)�����(bi��o)�O(sh��)�� 00001DCB D=1���_�@ʾ D=0�� �P(gu��n)�@ʾ C=1���@ʾ���(bi��o) C=0�����@ʾ���(bi��o) B=1�����(bi��o)�W�q B=0�����(bi��o)���W�q*/ write_com(0x06);//��ַָ��Ԅ�(d��ng)+1�ҹ��(bi��o)+1�����ַ���Ļ����(hu��)�Ƅ�(d��ng) write_com(0x01); write_com(0x80); write_data ('P'); write_com (0x81); write_data ('M'); write_com (0x82); write_data ('2'); write_com (0x83); write_data ('.'); write_com (0x84); write_data ('5'); write_com (0x85); write_data (':'); write_com (0xcb); write_data ('m'); write_com (0xcc); write_data ('g'); write_com (0xcd); write_data ('/'); write_com (0xce); write_data ('m'); write_com (0xcf); write_data ('3'); } void warn() { if (num>=200) { voice=0; light=0; } } void main() { init(); SCON=0x50; //�O(sh��)�����ڹ�����ʽ PCON=0x00; //�����²����� TMOD=0x20; //���r(sh��)��1������8λ�Ԅ�(d��ng)���d�Mʽ�����ڮa(ch��n)�������� EA=1; ES = 1; //���S�����Д� TL0=0x80; TH0=0xFB; TR0=1; num=TV; a= TV /100+0x30; TV %=100; b= TV /10+0x30; TV %=10; c= TV +0x30; write_com (0x88); write_data (a); write_com (0x89); write_data (b); write_com (0x8a); write_data (c); //warn(); while(1); } void serial() interrupt 4 { ES = 0; //�P(gu��n)�]�����Д� RI = 0; //������н��ܘ�(bi��o)־λ buf = SBUF; //�Ĵ��ھ��_�^(q��)ȡ�Ô�(sh��)��(j��) senddata(buf); ES = 1; //���S�����Д� } void senddata(uchar dat) {if(dat==170) //�Д���ʼλ OxAA, (0xAA==l70�� { i=0; cal[i]=dat; } else { i=i+1; cal[i]=dat; } if(i==6) { sum= cal[1]+cal[2]+cal[3]+cal[4];//sum=Vout(M)+Vout(L)+Vref(M)+Vref(L) } if (sum == cal [5] && cal[6]==255) //sum�cУ�(y��n) ��ͬ &&���һλ�� OxFF �Y(ji��)��λ { for (i=0; i <=6; i++) //��̎forѭ�h(hu��n)���@ʾ�����Д�(sh��)��(j��)����cal [7]�еĔ�(sh��)��(j��) { SBUF=cal[i]; while(!TI); TI=0; } Vo=(cal[1]*256+cal[2])/2048*5; TV=3000* Vo; } } |
| �����������TTL�ƽ�ľͿ��� |
| ��֪������ʲô��������ݔ��ݔ���ƽ�Ƕ��٣� |
| �ƽһ�ӿ���ѽ |
С����|51�����Փ��
|
 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664
Powered by ��Ƭ�C(j��)�̳̾W(w��ng)

 �ղ�
�ղ� �
� ��
��