|
�l���r�g: 2017-11-23 19:36
����ժҪ:ܛ�����ܿ��Ԍ��F�ˣ�����Ҳ���Ԍ��F������555����r���F���}�������ܽ�Qһ��555�a���ӕr��̖Ӳ���OӋ���}ô���҈DƬ�е���ݣ����ֵ�϶��І��}���l���Խ�Qһ��ô |
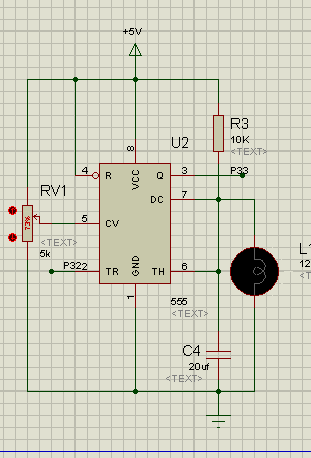
by64214 �l���� 2017-11-28 22:23 �ǂ�L1��ʲô�|�������� |
| ��ô�ӡ��ɹ���ô�����OӋ�˛]�ð� |
|
�W�ϳ��� ���g�ɹ� #include<reg52.h> #include <intrins.h> #define uint unsigned int #define uchar unsigned char sbit rs=P2^0; //1602�Ĕ���/ָ���x����ƾ� sbit rw=P2^1; //1602���x�����ƾ� sbit en=P2^2; //1602��ʹ�ܿ��ƾ� sbit trig=P2^5; //�����y��ģ�KTrig sbit echo=P3^2; //�����y��ģ�KEcho bit flag1; //�|�l��̖��־λ// uchar count; //�Д��ۼ�׃�� long int distance; //�y�����þ��x unsigned char code table[ ]={"0123456789"}; //���x�ַ����M�@ʾ���� /*------------------------------------------------ �ӕr���� ------------------------------------------------*/ void delay(uint n) { uint x,y; for(x=n;x>0;x--) for(y=110;y>0;y--); } /*------------------------------------------------ �ӕr���� ------------------------------------------------*/ void delayt(uint x) { uchar j; while(x-- > 0) { for(j = 0;j < 125;j++) { ; } } } /*------------------------------------------------ 1602������� ------------------------------------------------*/ void lcd_wcom(uchar com) { rs=0; //�x��ָ��Ĵ��� rw=0; //�x�� P0=com; //������������P0 delay(5); //�ӕrһС������1602�ʂ���Ք��� en=1; //ʹ�ܾ��ƽ׃������������1602��8λ������,�@�c�dz���Ҫ en=0; } /*------------------------------------------------ 1602���������� ------------------------------------------------*/ void lcd_wdat(uchar dat) { rs=1; //�x���Ĵ��� rw=0; //�x�� P0=dat; //��Ҫ�@ʾ�Ĕ�������P0 delay(5); //�ӕrһС������1602�ʂ���Ք���,Ҳ���Ǚz�yæ��̖���@�c�dz���Ҫ�� en=1; //ʹ�ܾ��ƽ׃������������1602��8λ������ en=0; } /*------------------------------------------------ 1602��ʼ������ ------------------------------------------------*/ void lcd_init() { lcd_wcom(0x38); //8λ�������p�У�5*7���� ���õ������O��ָ�� lcd_wcom(0x0c); //�_���@ʾ�����P��ˣ���˲��W�q���õ��@ʾ�_�P����ָ�� lcd_wcom(0x06); //�@ʾ��ַ�f��������һ���������@ʾλ������һλ���õ��ˌ���ģʽ�O��ָ�� lcd_wcom(0x01); //�������õ�������ָ�� } /*------------------------------------------------ 1602�@ʾ�̶��ַ����� ------------------------------------------------*/ void lcd_xianshi() { lcd_wcom(0x80+0x40); lcd_wdat('D'); lcd_wdat('i'); lcd_wdat('s'); lcd_wdat('t'); lcd_wdat('a'); lcd_wdat('n'); lcd_wdat('c'); lcd_wdat('e'); lcd_wdat(':'); lcd_wcom(0x80+0x4c); lcd_wdat('.'); lcd_wcom(0x80+0x4e);//��λ������// lcd_wdat('c'); lcd_wdat('m'); } /*------------------------------------------------ ���������r��0��ʼ��������Ӌ��푑���̖�r�g ------------------------------------------------*/ void init_t0() { TMOD=0x01; TL0=0x66; TH0=0xfc; //1ms ET0=1; EA=1; } /*------------------------------------------------ ������ ����ģ�K�|�l��̖ ------------------------------------------------*/ void trigger() { trig=0; _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); _nop_(); trig=1; } /*------------------------------------------------ ������ ����ģ�K�����˿ڳ�ʼ������ ------------------------------------------------*/ void init_measuring() { trig=1; echo=1; count=0; } /*------------------------------------------------ ������ ����ģ�K���x�yԇ���� ------------------------------------------------*/ void measuring() { uchar l; uint h,y; TR0 = 1; while(echo==1) { ; } TR0 = 0; l = TL0; h = TH0; y = (h << 8) + l; y = y - 0xfc66;//us���� distance = y + 1000 * count;//Ӌ�㿂�r�g,��λ���� TL0 = 0x66; TH0 = 0xfc; delayt(30); distance = 3400* distance / 20000;//ԭʼ�飺��0.34����/us��*�r�g/2// } /*------------------------------------------------ ������ ����ģ�K�y���Y���@ʾ���� ------------------------------------------------*/ void display(uint x) { uchar qian,bai,shi,ge; qian=x/1000; bai=(x/100)%10; shi=(x/10)%10; ge=x%10; lcd_wcom(0x80+0x49);//��λ������// lcd_wdat(table[qian]); lcd_wdat(table[bai]); lcd_wdat(table[shi]); lcd_wcom(0x80+0x4d); lcd_wdat(table[ge]); } /*------------------------------------------------ ������ ������ ------------------------------------------------*/ void main() { lcd_init(); //Һ����ʼ�� init_t0(); //���r��0��ʼ�� init_measuring(); //���������˿ڳ�ʼ�� while(1) { lcd_xianshi(); //Һ���@ʾ�ض��ַ� trigger(); //�|�l�������� while(echo==0) //�ȴ��� { ; } measuring(); //�M�о��x�y�� display(distance); //���y���Y���M���@ʾ init_measuring(); //���������˿ڳ�ʼ�� delayt(600); //ÿ�Μy���g��60ms } } //�����������������������������������Д���պ�����������������������������������������// void T_0()interrupt 1 { TF0 = 0; TL0 = 0x66; TH0 = 0xfc; count++; if(count==18) { TR0 =0; TL0 = 0x66; TH0 = 0xfc; count = 0; } } |

|
|
|
Dushu �l���� 2017-11-23 21:19 �]��߀���������кõĽ��hô |
| ���F�@������sr04�ɹ��ˆ� |
С����|51�����Փ��
|
 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664
Powered by ��Ƭ�C�̳̾W

 �ղ�
�ղ� �
� ��
��