|
���F(xi��n)��������Փ��ԇ�� 1. �\�����ʔ�(sh��)�Wģ���c���ѿ���Ҏ(gu��)�ɵ����ü������g���Pϵ�� �����Ԅӿ��Ƶ�ϵ�y(t��ng)�У�����ʹ�҂��OӋ���Ԅӿ���ϵ�y(t��ng)�ķ�(w��n)���Ժ͕��B(t��i)���ܝM���҂���Ҫ���҂��ͱ��Ҫ��ϵ�y(t��ng)�ĕ��B(t��i)�^���M�ж�������Փ���������������(n��i)�ڵĿ���Ҏ(gu��)�ɡ� �Á�����ϵ�y(t��ng)������֮�g����Pϵ�Ĕ�(sh��)�W���_ʽ����ϵ�y(t��ng)�Ĕ�(sh��)�Wģ�ͣ����������������������Ԍ�һ�����w��ϵ�y(t��ng)����(j��)���(n��i)���Y(ji��)��(g��u)�D(zhu��n)׃���҂���Ϥ�Ĕ�(sh��)�W���_ʽ����Փ�dž�ݔ���ݔ��ϵ�y(t��ng)���ַ��̡����f����(sh��)߀�Ƕ�ݔ���ݔ���µĠ�B(t��i)���̡� ��ϵ�y(t��ng)�Ŀ���Ҏ(gu��)�ɣ����Ծ��w�����緀(w��n)�B(t��i)�`��{(di��o)��(ji��)�r�g�����{(di��o)�����ɿ��Ե��@Щָ�ˣ�ͨ�^�@Щָ�˿��Զ���������ϵ�y(t��ng)�������_�������ܲ��ܰ����҂���Ҫ���M�п��ƣ����Ƶ�Ч����Ρ� ÿһ���_���Ŀ���ϵ�y(t��ng)�������г���Ψһ�Ķ�����(sh��)�Wģ�ͣ��ڲ�ͬ�Ĕ�(sh��)�Wģ�����҂���ϵ�y(t��ng)����Ҏ(gu��)�ɷ����Ă�(c��)���c���M��ͬ���������о�ϵ�y(t��ng)�ɿ��ԕr�����һ�_ʼ��ģ�҂��͜ʴ_���г�����˜��ԣ��@�͌��҂�֮��ķ��������˷���Ϳ�ݡ����Ҳ�ͬ��͵Ŀ���ϵ�y(t��ng)Ҳ���������m�õ�ģ�ͣ��ڶ�ݔ���ݔ����ϵ�y(t��ng)���҂�?n��i)��߀������̖���D���߂��f����(sh��)��ģ�ͣ���ô������ģ���y߀���ܕ���ϵ�y(t��ng)Ҏ(gu��)�ɵķ������F(xi��n)�^���ƫ��C�����������ʵĔ�(sh��)�Wģ�Ϳ��Ԝʴ_����������ϵ�y(t��ng)������Ҏ(gu��)�ɣ�ͨ�^��ģ�͵ķ����҂����Ԝʴ_���լF(xi��n)�еĿ���Ҏ(gu��)�ɣ��Ķ�����(j��)��Ҫ��ϵ�y(t��ng)�M�и��ƣ�ʹϵ�y(t��ng)���õ���ɿ���Ҫ�� 2. �������殐����׃�Q�ڿ���ϵ�y(t��ng)�����е����ã� ����һ���_���Ŀ���ϵ�y(t��ng)�У��҂������x��ͬ�Ġ�B(t��i)׃���Ͳ�ͬ����ʽ���M������������ͬһ������ϵ�y(t��ng)���Ԍ�����ͬ�ľ�ꇣ����殐����׃�Q���nj�ԭ��B(t��i)ʸ��������׃�Q���Ķ��ó���һ��B(t��i)ʸ������ϵ�y(t��ng)�Ġ�B(t��i)���g���_ʽ׃���µ���ʽ�����殐����׃�Qֻ�nj�����ϵ�y(t��ng)�ķ���׃���ˣ�ϵ�y(t��ng)������ֵ��ϵ�y(t��ng)�������]��׃������Ӱ��䷀(w��n)���ԡ��ܿ����^�ԡ����殐����׃�Q������ϵ�y(t��ng)�ķ���׃��һ�N�����҂���ֱ�^����ϵ�y(t��ng)����ʽ�����猦�ǘ˜��Ϳ����҂�ֱ�^�õ�ϵ�y(t��ng)�ķ�(w��n)���ԣ������ؘܿ˜��ͺ����^�˜��̈́t�����҂����õķ������ܿغ����^�ԡ� 3.�\����B(t��i)�����c��B(t��i)�^�y���ژO�c���Õr�ķ��x���ԣ� �����S�����ϵ�y(t��ng)�У��҂����F(xi��n)����Ȇ��}�r��Ҫ��Ҫ��B(t��i)�����������S���B(t��i)׃���o��ֱ�әz�y������B(t��i)�^�y�����Ԍ��F(xi��n)��B(t��i)�������������]�h(hu��n)ϵ�y(t��ng)�У��O�c����ֱ�Ӡ�B(t��i)����ϵ�y(t��ng)�ĘO�c���^�y�������ĘO�c�ɂ����֣������@���ߪ���������x�����^�y����(g��u)�ɵķ����]�h(hu��n)ϵ�y(t��ng)��ֻҪϵ�y(t��ng)�܉��^�y�����B(t��i)������ꇺ��^�y�������e�C���Ӱ푣����֪��������Էքe�OӋ���@�����|(zh��)�Q���]�h(hu��n)�O�c�OӋ�ķ��x�ԡ� 4. ʲô�ǽ�����ƣ� ������һ���ȡʲô������ ���ڶ�ݔ���ݔ���Ŀ���ϵ�y(t��ng)�У�ÿ��ݔ��֮�g����ã�ÿ��ݔ�����յ�����ݔ��Ŀ��ƣ��@�o�҂���ϵ�y(t��ng)�ķ�������˺ܴ����y��������ƾ���ʹϵ�y(t��ng)�е�ÿһ��ݔ����ֻ�܆�ݔ��Ŀ��ơ��ڹ�����һ���Ѓ��з�����ǰ���a��������͠�B(t��i)������� - ��������ϵ�y(t��ng)��(w��n)���Ե���ҪӰ����ؼ������ж�������
�𣺮��_�����Õr��ݔ������ƫ�xԭ���ķ�(w��n)��ֵ���@�r���ڷ���������ͨ�^ϵ�y(t��ng)��(n��i)�����Ԅ��{(di��o)��(ji��)��ϵ�y(t��ng)���Իص�ԭ���ķ�(w��n)��ֵ��(w��n)�������˕rϵ�y(t��ng)ʹ��(w��n)���ģ���ϵ�y(t��ng)��һ����(w��n)�B(t��i)�^�ȵ���һ����(w��n)�B(t��i)�r����Ҫ��(j��ng)�vһ���^���^�̣������@���^���^�����ܵ�ָ�˽������B(t��i)����ָ�ˡ��������{(di��o)���������r�g���{(di��o)��(ji��)�r�g����ʎ�Δ�(sh��)�ȡ��ڌ��H������ֻ���ж���(w��n)��߀�����҂�߀Ҫ֪��ϵ�y(t��ng)�����жව(w��n)�����˕r�҂����]ϵ�y(t��ng)�ķ�(w��n)��ԣ���Ƕ��١� �����ڃ�(n��i)��������ã�ʹϵ�y(t��ng)���F(xi��n)�l(f��)ɢ��̎�ڲ���(w��n)���Ġ�B(t��i)���@�rϵ�y(t��ng)�Dz���(w��n)���ġ������κο���ϵ�y(t��ng)���f����Ҫ�ėl������ϵ�y(t��ng)�܉�(w��n)���� - �����B�m(x��)ϵ�y(t��ng)���䷀(w��n)����ֻȡ�Q��ϵ�y(t��ng)�����Ĺ������ԣ�ϵ�y(t��ng)�Y(ji��)��(g��u)�����ǽY(ji��)��(g��u)����(sh��)�ȣ��͔_������ݔ�����]���Pϵ����ȡ�Q�ڔ_����ʧ�B(t��i)�����Ƿ��˥�p������ȫ�Q����ϵ�y(t��ng)�]�h(hu��n)���f����(sh��)�ĘO�c�ֲ��������еĘO�c����s�S��ؓ��ƽ��tϵ�y(t��ng)��(w��n)���������������Q��ϵ�y(t��ng)�ķ�(w��n)���ԣ��]�h(hu��n)��O�c�Q��ϵ�y(t��ng)��Ʒ�|(zh��)
1����һ����(w��n)���Г�(j��)���r���µķ�(w��n)���Г�(j��)���m���ڵ��Aϵ�y(t��ng)��������(sh��)��(w��n)���Г�(j��)����˹��(w��n)���Г�(j��)���ՠ��SƝ�Г�(j��)�ȡ�����ԭ��߀��������ֵ��ȡֵ���Дࡣ�Ԅ�˹�Г�(j��)���������г���˹������(j��)���еķ�̖�����Д��䷀(w��n)���ԣ��ڴ_����(w��n)ԣ�ȕr���Ԍ�ԭ�]�h(hu��n)�����е�sʹ��s=z-�Ĵ�������(w��n)�cԣ�Ȧġ� 2���ڶ�����(w��n)���Г�(j��)���m���ڸ��Aϵ�y(t��ng)���д�������(sh��)��ϵ�y(t��ng)������܉�E������܉�E����sƽ�����������������B�����ڈD�п��Կ��������������ķֲ�����ϵ�y(t��ng)�Ă��f����(sh��)����δ֪�ą���(sh��)K�r���҂����Ը���(j��)��܉�E���L��Ҏ(gu��)�t����������Kֵ�µ���������ֵ�ķֲ���ÿ�_��һ��Kֵ���Ϳ��Եȵ�ϵ�y(t��ng)��һ�M����ֵ���Ķ�����(j��)����ֵ����sƽ��ķֲ��Д�ϵ�y(t��ng)�Ƿ�(w��n)���� 3����������(w��n)���Г�(j��)���l�������µķ�(w��n)���Г�(j��)������ʽ��(w��n)���Г�(j��)�����D����(sh��)��(w��n)���Г�(j��)����ʽ��(w��n)���Г�(j��)�nj�sƽ��ӳ�䵽��ƽ���ϡ���ʽ�����@��-1��j0���c��r����D(zhu��n)���ܔ�(sh��)N����sƽ���ϵ��_�h(hu��n)�O�c����(sh��)P���]�h(hu��n)�O�c����(sh��)Z���M��Z=P-N���tϵ�y(t��ng)�Ƿ�(w��n)���ġ����l��������λԣ�Ⱥ�����ԣ�ȁ��Д���������(w��n)���ԡ� �ڲ��D����(sh��)��(w��n)���Г�(j��)���������؈D�����ֱ�^�Ŀ���ϵ�y(t��ng)�Ƿ�(w��n)���ͷ�(w��n)��ԣ�ȵĴ�С�� 4�����Ă��Г�(j��)�������ڶ�ݔ���ݔ������ϵ�y(t��ng)�����������Z��(w��n)���Г�(j��)���c��(j��ng)����Ʋ�ͬ���������Z�����x�µķ�(w��n)�������Ă����棺��(w��n)�����u����(w��n)�������u����(w��n)���Ͳ���(w��n)�����������Z���һ�����g�ӷ����@��ͨ�^��B(t��i)���̽���������Д�ġ��䷀(w��n)���ij�Ҫ�l���Ǡ�B(t��i)���̵�����ֵС�ڵ����㡣���ڶ����t��ͨ�^��(g��u)�����Ϻ���(sh��)���ж��ġ�һ����r��ݔ���ݔ������ϵ�y(t��ng)���Г�(j��)�^�����Ҳ�ܷ����ݣ�ֻ���ڶ�ݔ���ݔ���ĕr�������Г�(j��)�õ��^�࣬�����Г�(j��)�����ă�(y��u)���w�F(xi��n)�ڷǾ���ϵ�y(t��ng)���ж��С� - �����xɢϵ�y(t��ng)��������ϵ�y(t��ng)�е���̖�H���x���xɢ�r�g�ϣ��@�ӵ�ϵ�y(t��ng)�Q�龀��ϵ�y(t��ng)������B�m(x��)ϵ�y(t��ng)��������֮̎���҂�ʹ��z׃�Q��������䷀(w��n)���ԡ�
1����һ���Г�(j��)����sƽ��ӳ�䵽zƽ���ϣ�ֻҪϵ�y(t��ng)������ֵ��zƽ��Ć�λ�A��(n��i)��ϵ�y(t��ng)��(w��n)����ʹ�Ô�(sh��)�W�Pϵ��z׃�Q����ʽ׃�Q�D(zhu��n)�Q֮�����(sh��)��(w��n)���Г�(j��)ͬ���m�á� 2���ڶ����Г�(j��)����ʽ��(w��n)���Г�(j��)�����D��һ����r�²��D�õ��^�� - �Ǿ���ϵ�y(t��ng)��ԓϵ�y(t��ng)�ķ�(w��n)���Բ����Q����ϵ�y(t��ng)������������߀ȡ�Q�ڔ_������ݔ������һ������Ǿ���ϵ�y(t��ng)�Ĺ��̷����ЃɷN��һ����ƽ�淨���m��һ���A��������������(sh��)�����m�ϸ��A��
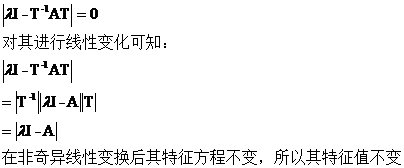
1����һ���Г�(j��)����ƽ�淨�����ؓ��������(sh��) ����ϵ�y(t��ng)���Բ��ֵķ���������������ԓ����(sh��)�tϵ�y(t��ng)����(w��n)�����������tϵ�y(t��ng)��(w��n)���� ����ϵ�y(t��ng)���Բ��ֵķ���������������ԓ����(sh��)�tϵ�y(t��ng)����(w��n)�����������tϵ�y(t��ng)��(w��n)���� 2���ڶ����Г�(j��)���������Z���Г�(j��)���ڷǾ���ϵ�y(t��ng)�з�(w��n)����������ϵ�y(t��ng)��ƽ��B(t��i)���Եģ���ͬ��ƽ��B(t��i)������ͬ�ķ�(w��n)���ԣ�����ֻ�ܷքeӑՓ����ƽ��B(t��i)�����ķ�(w��n)���ԡ������н�B�������Г�(j��)�Ļ��������� ���ϵ�һ���У��ڷǾ���ϵ�y(t��ng)�У�����(j��)���B(t��i)���̿��������������(sh��)���ſ˱Ⱦ�ꇣ��ٌ��侀�Ի����˕r�õ��ľ��Ի����̵�����ֵ�Ϳ�������ϵ�y(t��ng)һ���ж����С��С�ڵ�����rϵ�y(t��ng)�Ƿ�(w��n)���ġ� ���ϵڶ����У��������Z���������̓��(g��u)һ����������(sh��)��������Q���������Z��(sh��)����һ�����c������B(t��i)׃��x��t���P��ӛ��V��x��t���������@��t���tӛ��V��x��������һ����������(sh��)�����]����������(sh��)���Ǵ����㣬�ʞ���������(sh��)������˥�p������), ��ʾ���������Z��ڶ�������V�� ��ʾ���������Z��ڶ�������V�� �ķ�̖������ֱ�ӌ�ƽ���B(t��i)��(w��n)���������Д࣬�o�����ϵ�y(t��ng)��̡����w���£��Oϵ�y(t��ng)�Ġ�B(t��i)���̞� �ķ�̖������ֱ�ӌ�ƽ���B(t��i)��(w��n)���������Д࣬�o�����ϵ�y(t��ng)��̡����w���£��Oϵ�y(t��ng)�Ġ�B(t��i)���̞� ���������һ����������(sh��))V��x�������B�m(x��)��һ�Aƫ����(sh��)�����ҝM�㣺��1�� ���������һ����������(sh��))V��x�������B�m(x��)��һ�Aƫ����(sh��)�����ҝM�㣺��1�� V��x���������ģ���2�� ��ؓ���ģ��tϵ�y(t��ng)��ԭ�c̎��ƽ���B(t��i)�ǝu����(w��n)���ġ� ��ؓ���ģ��tϵ�y(t��ng)��ԭ�c̎��ƽ���B(t��i)�ǝu����(w��n)���ġ� ���F(xi��n)��������Փ��ԇ�� 
1.ϵ�y(t��ng)�Ġ�B(t��i)���g���_ʽ�� �⣺ ��matlab�ɵã� A=[0 1;-2 -3]; >> [v,d]=eig(A) v = 0.7071 -0.4472 -0.7071 0.8944 d = -1 0 0 -2 ������ֵ��-1��-2������������v��ꇵăɂ��������������������� - �C����ϵ�y(t��ng)��(j��ng)����׃�Q��������ֵ��׃��
�C���� ϵ�y(t��ng)�����������ǣ� ϵ�y(t��ng)��(j��ng)�^���殐׃�Q�� �����������ǣ�  ��matlab�ɵã� ��matlab�ɵã�T=[2.8284 1.4142;2.2361 2.2361]; B=[1;1]; T*B ans = 4.2426 4.4722 CT��matlab�ɵã� C*v ans = 0.7071 -0.4472 
2.��֪ϵ�y(t��ng) ԇ����ݔ���ܿ��Ժ͠�B(t��i)�ܿ��ԡ� �⣺ ��B(t��i)�ܿأ� ��matlab��֪�� a=[-4 5;1 0]; b=[-5;1]; c=[1 -1]; M=ctrb(a,b) M = -5 25 1 -5 ��֪M��ꇲ��M�ȣ�����ԓϵ�y(t��ng)��B(t��i)���ܿء� ݔ���ܿأ� Rank��cb cab��=rank[-6 30]=1 ԓ��ꇝM�ȣ�����ԓϵ�y(t��ng)ݔ���ܿ� 
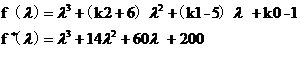
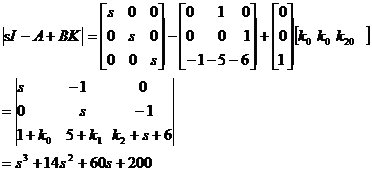
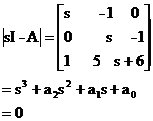
3. ��ϵ�y(t��ng)�Ġ�B(t��i)���g���_ʽ�� ԓϵ�y(t��ng)�Ƿ����^�y�������^�y��ԇ������^�y�˜��͡� �⣺ ��matlab��֪�� a=[1 -1;0 2]; b=0; c=[-1 -0.5]; N=obsv(a,c) N = -1.0000 -0.5000 -1.0000 0 ԓ�Єe��ꇝM�ȣ�����ԓϵ�y(t��ng)���^�y�� �����^�˜����ǣ� 4. ϵ�y(t��ng)���à�B(t��i)���� ���M���O�c������ ���M���O�c������ �� �� ��ģ������: ��ģ������: ԇ�����N��ͬ�����_����B(t��i)����������K�� �⣺ ����һ��ԓ��ʽ�ѽ�(j��ng)���ؘܿ˜��ͣ������B(t��i)����ꇺ���������ʽ���������������ʽ�ǣ� ���տɵ�k=[199 55 8] �������� ����  �ɵã� K=[199 55 8] �������� ���������������ǣ�
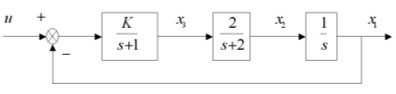
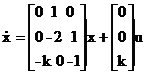
5. ԇ�_���Dʾϵ�y(t��ng)������K�ķ�(w��n)���������������ϵڶ������� �⣺��ϵ�y(t��ng)��D�ɵ����B(t��i)���̣� �t��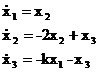 ��ԓʽ����֪����0��0���c��ƽ���B(t��i) ��ԓʽ����֪����0��0���c��ƽ���B(t��i) �O��������� ��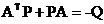 �����Ƴ� �����Ƴ� ���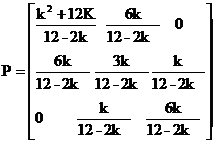 ��p��������ꇄt��һ�A�����A�����A���� ��p��������ꇄt��һ�A�����A�����A���� ʽ��Ҫ�����㼴��  �ⲻ��ʽ�M����֪��k>0��12-2k>0������֪��k��ȡֵ������0<k<6
������Word��ʽ�ęn51�����d��ַ��
 ���F(xi��n)��������Փ��ԇ��.doc
(186.34 KB, ���d��(sh��): 11)
���F(xi��n)��������Փ��ԇ��.doc
(186.34 KB, ���d��(sh��): 11)
2017-12-28 02:31 �ς�
�c���ļ������d����
| 

 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664



 ��
��