��1��
�wՓ1.1�n�}�����c�о����x��ӳ�����һ�NӋ(j��)���ֶΣ��V����(y��ng)���ڹ��r(n��ng)�I(y��)�����С���ͨ����(n��i)���Q(m��o)�ȸ���(g��)�I(l��ng)���c���������o�����B����ӳ�����Ӻ����е�һ�N�������LJ�(gu��)�ҷ���Ӌ(j��)�����ߣ��LJ�(gu��)Ӌ(j��)��������(gu��)�����O(sh��)���ƌW(xu��)�о�����(n��i)���Q(m��o)�ײ���ȱ�ٵ�Ӌ(j��)���O(sh��)�䣬�����a(ch��n)Ʒ���g(sh��)ˮƽ�ĸߵͣ���ֱ��Ӱ푸��и��I(y��)�ĬF(xi��n)����ˮƽ�����(hu��)��(j��ng)��(j��)Ч�����ߡ��Q(ch��ng)���b�ò��H���ṩ������(sh��)��(j��)�Ć��w�x�����������鹤�I(y��)����ϵ�y(t��ng)���̘I(y��)����ϵ�y(t��ng)��һ��(g��)�M�ɲ��֣����M(j��n)�˹��I(y��)���a(ch��n)���Ԅ�(d��ng)�������ĬF(xi��n)�����������˿s�����I(y��)�r(sh��)�g�����Ʋ����l����������Դ�Ͳ��ϵ����ġ���߮a(ch��n)Ʒ�|(zh��)���Լ��ӏ�(qi��ng)��I(y��)���������ƽ�(j��ng)�I(y��ng)�����ȶ������á��Q(ch��ng)���b�õđ�(y��ng)���ѱ鼰����(gu��)��(j��ng)��(j��)���I(l��ng)��ȡ�����@���Ľ�(j��ng)��(j��)Ч�档
��ӳ��ǷQ(ch��ng)�ؼ��g(sh��)�е�һ�N���̓x�����V����(y��ng)���ڸ��N��(ch��ng)�ϡ���ӳ��c�C(j��)е�ӱ��^���w�eС�������p���Y(ji��)��(g��u)��(ji��n)�Ρ��r(ji��)��͡���(sh��)�Ãr(ji��)ֵ��(qi��ng)���S�o(h��)��������c(di��n)�����ڸ��N�h(hu��n)��������������̖(h��o)���h(yu��n)�������ڌ�(sh��)�F(xi��n)�����@ʾ��(sh��)�ֻ��������cӋ(j��)��C(j��)(li��n)�W(w��ng)����(sh��)�F(xi��n)���a(ch��n)�^(gu��)���Ԅ�(d��ng)������߄ڄ�(d��ng)���a(ch��n)�ʡ�������ˮƽ�����������g(sh��)�ѽ�(j��ng)��(j��ng)�v���Ă�(g��)�A�Σ��Ă��y(t��ng)��ȫ���əC(j��)еԪ�����M�ɵęC(j��)е�Q(ch��ng)������Ӿ�·���沿�֙C(j��)еԪ�����ęC(j��)늽Y(ji��)�ϳӣ���?g��u)ļ����·ʽ��Ŀǰ�Ć�Ƭ�C(j��)ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����Ӌ(j��)�r(ji��)�ӡ��҇�(gu��)��Ӻ���������ęC(j��)늽Y(ji��)���Ͱl(f��)չ���F(xi��n)�ڵ�ȫ����ͺ͔�(sh��)�������͡��F(xi��n)����Ӻ������켼�g(sh��)����(y��ng)�õõ����°l(f��)չ����ӷQ(ch��ng)�ؼ��g(sh��)���o�B(t��i)�Q(ch��ng)�����(d��ng)�B(t��i)�Q(ch��ng)�ذl(f��)չ��Ӌ(j��)��������ģ�M�y(c��)����(sh��)�֜y(c��)���l(f��)չ���y(c��)�����c(di��n)�Ć΅���(sh��)�y(c��)���������(sh��)�y(c��)���l(f��)չ����Ҏ(gu��)�Ĝy(c��)ԇ�x���x���Ϳ����b�ñ������M(j��n)�����܃x����ȡ����ʹ�Â��y(t��ng)����Ӝy(c��)��?j��)x�����h(yu��n)�x�����ܡ����ȼ��Ԅ�(d��ng)��ˮƽ������l(f��)���˾�׃����������(y��ng)�ij��F(xi��n)�˸��N���ӵ����܃x������ϵ�y(t��ng)��ʹ�ÿƌW(xu��)��(sh��)�(y��n)�͑�(y��ng)�ù��̵��Ԅ�(d��ng)���̶ȵ����@����ߡ�
��ӷQ(ch��ng)�صČ�(sh��)�F(xi��n)������ͨ�^(gu��)�����������ɼ������y(c��)���w�������������D(zhu��n)�Q��늉���̖(h��o)��ݔ��늉���̖(h��o)ͨ����С����Ҫͨ�^(gu��)ǰ����̖(h��o)̎���·�M(j��n)�М�(zh��n)�_�ľ��ԷŴŴ���ģ�M늉���̖(h��o)��(j��ng)A/D�D(zhu��n)�Q�·�D(zhu��n)�Q�ɔ�(sh��)���������뵽�����·�Ć�Ƭ�C(j��)�У��ٽ�(j��ng)�^(gu��)��Ƭ�C(j��)�����g�a�@ʾ�����Ķ��@ʾ�����y(c��)���w�������������O(sh��)Ӌ(j��)�Ļ���Ҫ��ϵ�y(t��ng)�ɷ֞�����ģ�K����(sh��)��(j��)�ɼ�ģ�K��������ģ�K���˙C(j��)����Һ���@ʾ����ģ�K�����Д�(sh��)��(j��)�ɼ�ģ�K�ɉ�������������̖(h��o)��ǰ��(j��)̎����A/D�D(zhu��n)�Q���ֽM�ɡ��D(zhu��n)�Q��Ĕ�(sh��)����̖(h��o)�ͽo������̎�����ɿ�������Ɍ�(du��)ԓ��(sh��)������̎�����(q��)��(d��ng)�@ʾģ�K����˙C(j��)�g����Ϣ���Q���˲���(du��)ܛ�����O(sh��)Ӌ(j��)Ҫ����^�ߣ�ϵ�y(t��ng)�Ĵֹ��ܶ���Ҫܛ����(l��i)���ơ��ڔU(ku��)չ�����ϣ����O(sh��)Ӌ(j��)������һ��(g��)�^(gu��)�d��(b��o)����ʾ���ܺ�����՚v����ʹ����ӷQ(ch��ng)���O(sh��)Ӌ(j��)�����Ի����ܻ���
1.2 ϵ�y(t��ng)�O(sh��)Ӌ(j��)Ҫ��һ������Ҫ��
�O(sh��)Ӌ(j��)������һ����چ�Ƭ�C(j��)����ӳ���ϵ�y(t��ng)��
�������wҪ��
���n�}�о��ă�(n��i)�����Ԇ�Ƭ�C(j��)STC89C52RC����ƺ��ģ���(sh��)�F(xi��n)��ӳӵĻ������Լ��r(ji��)��Ӌ(j��)�㹦�ܡ����n�}����ӷQ(ch��ng)�Ļ������ܻ��A(ch��)�ϔU(ku��)չ������՚v���r(sh��)犹��ܡ�ԓϵ�y(t��ng)���Է֞��Ƭ�C(j��)��Сϵ�y(t��ng)����(sh��)��(j��)�ɼ�ϵ�y(t��ng)���˙C(j��)��������ϵ�y(t��ng)���Դϵ�y(t��ng)���r(sh��)犼��Z(y��)���(b��o)��(sh��)���ֽM�ɡ���Ƭ�C(j��)��Сϵ�y(t��ng)������Ҫ����STC89C52RC�ͽ�(j��ng)���(f��)λ�·����(sh��)��(j��)�ɼ������ɷQ(ch��ng)����������̖(h��o)�Ŵ��A/D�D(zhu��n)�Q���ֽM�ɣ���̖(h��o)�Ŵ��A/D�D(zhu��n)�Q������Ҫ�Ɍ�(zhu��n)���߾���24λAD�D(zhu��n)�QоƬHX711��(sh��)�F(xi��n)���˙C(j��)����������I�P(p��n)ݔ����c(di��n)�ʽҺ���@ʾ����Ҫʹ��4*4����I�P(p��n)��1602Һ���@ʾ�������Է����ݔ�딵(sh��)��(j��)��ֱ�^���@ʾ��(sh��)��(j��)���r(sh��)�ģ�K��Ҫ�ɕr(sh��)�оƬDS1302�͕r(sh��)��·�M�ɣ��Z(y��)���(b��o)��(sh��)ģ�K���Z(y��)���(b��o)�x��ӳ�ϵ�y(t��ng)���������r(ji��)�����~���Z(y��)���(n��i)�ݣ���Ҫ��SC1010B��ӷQ(ch��ng)��(zhu��n)���Z(y��)��оƬ��(sh��)�F(xi��n)��
���n�}����Ҫ�O(sh��)Ӌ(j��)�΄�(w��)����������
1��ϵ�y(t��ng)�Ɍ�(sh��)�F(xi��n)��ӷQ(ch��ng)�����ķQ(ch��ng)�ع��ܣ��Q(ch��ng)�ط�����0��5Kg�������`����ڡ�0.005Kg����
2��ϵ�y(t��ng)��(y��ng)�߂�ݔ��r(ji��)��Ӌ(j��)�㿂�r(ji��)���Z(y��)���(b��o)�r(ji��)�Ĺ��ܣ�
3��ϵ�y(t��ng)�������y(c��)������5Kg�r(sh��)��(y��ng)�Ј�(b��o)��ָʾ���ܣ����Q����(b��o)����ʾ����
4��ԓ��ӷQ(ch��ng)�O(sh��)Ӌ(j��)���������՚v���r(sh��)��@ʾ���ܵĔU(ku��)չ����δ�Q(ch��ng)�ؠ�B(t��i)��ϵ�y(t��ng)��(y��ng)�߂��@ʾ�����ա����ڼ��r(sh��)犹��ܡ�
1.3ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����Y(ji��)�����W(xu��)֪�R(sh��)��ͨ�^(gu��)�����Y�Ϻ�Փ�C����ͨ�^(gu��)���·�����(l��i)��(sh��)�F(xi��n)�n�}Ҫ��(sh��)�F(xi��n)��ָ��(bi��o)����������B����������
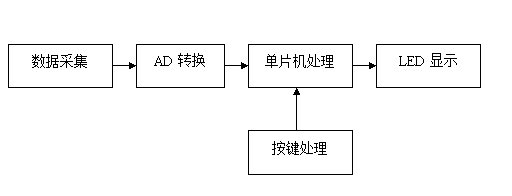
����һ ��(sh��)�a���@ʾ��
�D1-1 ��(sh��)�a���@ʾ����
�˷������Ô�(sh��)�a���@ʾ���w��������(ji��n)�ο��У����Բ��Ã�(n��i)������ģ��(sh��)�D(zhu��n)�Q���ܵĆ�Ƭ�C(j��)���ɴ��O(sh��)Ӌ(j��)������ӳ�ϵ�y(t��ng)��Ӳ�����ֺ�(ji��n)�Σ��ӿ��·���ڌ�(sh��)�F(xi��n)�������ھ��̕r(sh��)���p�ٳ����������·�Y(ji��)��(g��u)��ֻ�к�(ji��n)�ε�ݔ��ݔ���P(gu��n)ϵ��ȱ�c(di��n)�ǣ�Ӳ�����ֺ�(ji��n)�Σ��mȻ���Ԍ�(sh��)�F(xi��n)��ӷQ(ch��ng)�����ķQ(ch��ng)�ع��ܣ����Dz��܌�(sh��)�F(xi��n)�ⲿ��(sh��)��(j��)��ݔ�룬�o(w��)������(j��)��(sh��)�H��r�`����O(sh��)�����N���ƅ���(sh��)�����ڔ�(sh��)�a��ֻ�܌�(sh��)�F(xi��n)��(ji��n)�εĔ�(sh��)�ֺ�Ӣ���ַ����@ʾ�������@ʾ�h���Լ������ď�(f��)�s�ַ��������_(d��)���@ʾُ(g��u)����ε�Ҫ������?y��n)�����˾���ģ�?sh��)�D(zhu��n)�Q���ܵĆ�Ƭ�C(j��)��ϵ�y(t��ng)�·�^(gu��)�ں�(ji��n)�Σ�ϵ�y(t��ng)Ӳ���ĔU(ku��)չ���ܵ����ƣ���ӳӵĹ����^(gu��)�چ�һ���_(d��)�����O(sh��)Ӌ(j��)�Ę�(bi��o)��(zh��n)��
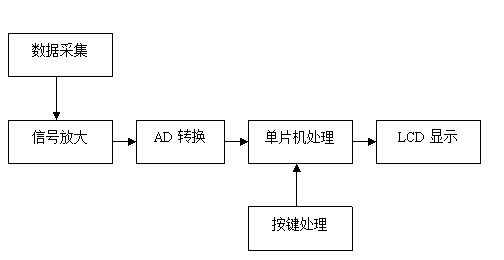
������ ��ǰһ�N�����Ļ��A(ch��)���M(j��n)�ДU(ku��)չ������һ�I�P(p��n)ݔ���b�ã�������猦(du��)��Ƭ�C(j��)��(n��i)���Ĕ�(sh��)��(j��)�O(sh��)����ʹ��ӷQ(ch��ng)��(sh��)�F(xi��n)�Q(ch��ng)��Ӌ(j��)�r(ji��)�Ĺ��ܡ�
�Y(ji��)��(g��u)��(ji��n)�D��D1-2��ʾ��
�D1-2�����I�P(p��n)ݔ��ĽY(ji��)��(g��u)��(ji��n)�D
�˷����O(sh��)Ӌ(j��)����ӳӣ����Ԍ�(sh��)�F(xi��n)�Q(ch��ng)��Ӌ(j��)�r(ji��)���ܣ����Ǿ����ڔ�(sh��)�a�ܵĹ��ܣ����@ʾ�r(sh��)ֻ���@ʾ�r(ji��)��ُ(g��u)�ᅡ�~�Լ���(ji��n)�ε�؛����a�ȡ����@ʾ�����r(sh��)�������(sh��)�a�ܛ](m��i)������λ��(sh��)����ô�Q(ch��ng)�����w�����ľ��ȱ��ܵ����ƣ����Դ˷�����Ҫ�^��Ĕ�(sh��)�a�ܽ����·�С��@����̎��ݔ��ݔ���ӿڕr(sh��)��Ҫ���ДU(ku��)չ�����I/O�ӿڹ���(sh��)�a��ʹ�ã����^�韩��
������ ǰ����̖(h��o)̎��r(sh��)���x�÷Ŵ���̖(h��o)�D(zhu��n)�Q�ȴ�ʩ��(l��i)������̖(h��o)�ɼ���(qi��ng)�ȵ���(hu��)��������(y��ng)���O(sh��)Ӌ(j��)�ɱ����@ʾ������þ����ַ��D���@ʾ���ܵ�LCD�@ʾ�����@�N�������H�ӏ�(qi��ng)���˙C(j��)���Q�����������ҝM���O(sh��)Ӌ(j��)Ҫ�����@ʾُ(g��u)����Ρ����Q(ch��ng)�������w��Ϣ�����P(gu��n)��(n��i)�ݣ���(d��ng)��Ҫ���ӔU(ku��)չ���ܕr(sh��)����ͨ�^(gu��)�ГQҺ���@ʾ����ķ�ʽ��(l��i)��(sh��)�F(xi��n)��
�Y(ji��)��(g��u)��(ji��n)�D���D1-3��ʾ��
�D3�����I�P(p��n)ݔ�뼰Һ���@ʾ�ĽY(ji��)��(g��u)��(ji��n)�D
�b���������N�����ă�(y��u)ȱ�c(di��n)����ϵ�y(t��ng)���O(sh��)Ӌ(j��)�r(sh��)��ֿ��]��ϵ�y(t��ng)�Č�(sh��)���Լ��ɱ��Ŀ����Ե�ǰ���£��O(sh��)Ӌ(j��)�������K����ӷQ(ch��ng)��������K��Ӳ���O(sh��)Ӌ(j��)�����D��D4��ʾ��ԓ��������������՚v���ܣ��Ķ�ʹ��ϵ�y(t��ng)���O(sh��)Ӌ(j��)���ܵõ��˺ܺõĔU(ku��)չ�c��(y��ng)�á�
1.4��ӳӵ���Ҫ�M��1.4.1 ��ӳӵĻ����Y(ji��)��(g��u) ��ӳ����������w���������Á�(l��i)�_�����w�|(zh��)�����������Ĝy(c��)��?j��)x����Ҳ���Á�(l��i)�_���c�|(zh��)�����P(gu��n)����������С������(sh��)�������ԡ����ܸ���(j��)ʲôԭ���Ƴɵ���˳Ӿ������������ֽM�ɣ�
- ���ء�������(f��)λϵ�y(t��ng)
���DZ��Q(ch��ng)���w�c�D(zhu��n)�QԪ��֮�g�ęC(j��)е��������(f��)λϵ�y(t��ng)���ַQ(ch��ng)��ӳӵij��w��һ��������ܱ��Q(ch��ng)���w�d�ɵij��d�����Ә�Y(ji��)��(g��u)�������B�Ӳ�������λ�p��C(j��)��(g��u)�ȡ�
2�� �Q(ch��ng)������
���ɷ�������|(zh��)�����������D(zhu��n)�Q��������D(zhu��n)�QԪ�������ǰ�֧����׃�Q��늵Ļ�������ʽ���m����Ӌ(j��)����ֵ����̖(h��o)���õ�һ�N�o���ֶΡ�
���շQ(ch��ng)�������ĽY(ji��)��(g��u)��ʽ��ͬ�����Է�ֱ��λ�Ƃ����������ʽ��늸�ʽ���λӋ(j��)ʽ������ʽ����ǻ�C����ʽ�ȣ��͑�(y��ng)׃����������葪(y��ng)׃ʽ���R�����C��ʽ���������ôŏ��ԡ���늺͉��������Ч��(y��ng)�Ă�������
��(du��)�Q(ch��ng)�������Ļ���Ҫ���ǣ�ݔ������cݔ���������ֆ�ֵ��(du��)��(y��ng)���������õľ����P(gu��n)ϵ�����^�ߵ��`���ȣ���(du��)���Q(ch��ng)���w�Ġ�B(t��i)��Ӱ�ҪС�������^��Ĺ����l���¹��������^�õ��l����ԣ���(w��n)���ɿ���
3) �y(c��)���@ʾ�͔�(sh��)��(j��)ݔ�����d�ɜy(c��)���b��
��̎���Q(ch��ng)��������̖(h��o)����Ӿ�·��������������ģ��(sh��)�D(zhu��n)�Q�����Դ��늉�Դ���{(di��o)��(ji��)�����a(b��)�LԪ�������o(h��)��·�ȣ���ָʾ���������@ʾ����ӡ����(sh��)��(j��)��ݔ�ʹ��A�����ȣ����@������(x��)�T�ϷQ(ch��ng)�d�ɜy(c��)���b�û���x�����ڔ�(sh��)��ʽ�Ĝy(c��)���·�У�ͨ������ǰ�÷ŴV�V���\(y��n)�㡢׃�Q��Ӌ(j��)��(sh��)���Ĵ桢���ƺ��(q��)��(d��ng)�@ʾ�ȭh(hu��n)��(ji��)��
1.4.2 ��ӳӵĹ���ԭ����(d��ng)���Q(ch��ng)���w�����ڳ��w�ij��_(t��i)�ϕr(sh��)����������ͨ�^(gu��)���w���f���Q(ch��ng)���������������S֮�a(ch��n)����һ�Ч��(y��ng)�������w�������D(zhu��n)�Q���c���Q(ch��ng)���w������һ������(sh��)�P(gu��n)ϵ��һ��������P(gu��n)ϵ�������̖(h��o)��늉�������ȣ�������̖(h��o)�ɷŴ��·�M(j��n)�зŴ�(j��ng)�V��������ģ����(sh��)( A/D)���M(j��n)���D(zhu��n)�Q����(sh��)����̖(h��o)���͵�̎����CPU̎����CPU���������I�P(p��n)�������_(k��i)�P(gu��n)������(j��)�I�P(p��n)ݔ���(n��i)�ݺ��N�����_(k��i)�P(gu��n)�Ġ�B(t��i)�M(j��n)�б�Ҫ���Дࡢ�������Ƀx����ܛ����(l��i)���Ƹ��N�\(y��n)�㡣�\(y��n)��Y(ji��)���͵���(n��i)���A������Ҫ�@ʾ�r(sh��)��CPU�l(f��)��ָ��ă�(n��i)���A�����x���͵��@ʾ���@ʾ�����ʹ�ӡ�C(j��)��ӡ��һ�����̖(h��o)�ķŴV����A/D�D(zhu��n)�Q�Լ���̖(h��o)���N�\(y��n)��̎�����ڃx������ɡ�
1.4.3 ��ӳӵ�Ӌ(j��)��������ӳӵ�Ӌ(j��)�������漰����Ҫ���g(sh��)ָ��(bi��o)�У����̡��ֶ�ֵ���ֶȔ�(sh��)����(zh��n)�_�ȵȼ�(j��)�ȡ�
(1) ���̣���Ӻ��������Q(ch��ng)��Max������ӳ�������������r�£����ܷQ(ch��ng)�������ֵ��
(2) �ֶ�ֵ����ӳӵĜy(c��)���������ֳ����ɵȷݣ�ÿ��ֵ����ֶ�ֵ����e��d��(l��i)��ʾ��
(3) �ֶȔ�(sh��)�������Ĝy(c��)���������ֳ����ɵȷݣ����ݔ�(sh��)����ֶȔ�(sh��)��n��ʾ��
��Ӻ��������Q(ch��ng)��Max�����ÿ��ֶȔ�(sh��)n�c�ֶ�ֵd�ij˷e��(l��i)��ʾ����Max=n��d
(4) ��(zh��n)�_�ȵȼ�(j��)
��(gu��)�H����Ӌ(j��)���M������ӳӰ���ͬ�ķֶȔ�(sh��)�ֳ�T��II��III�������(l��i)�ȼ�(j��)���քe��(du��)��(y��ng)��ͬ��(zh��n)�_�ȵ���ӳӺͷֶȔ�(sh��)n�ķ��������1-1��ʾ��
��1-1 ��ͬ��(zh��n)�_�ȵ���ӳӺͷֶȔ�(sh��)
��2�� ϵ�y(t��ng)Ӳ���O(sh��)Ӌ(j��)
2.1 ��ϵ�y(t��ng)Ԫ�����x�ͼ�����(sh��)��B2.1.1 ϵ�y(t��ng)��Ƭ�C(j��)�x����Ƭ�C(j��)���x��������(g��)ϵ�y(t��ng)�O(sh��)Ӌ(j��)�����P(gu��n)��Ҫ��Ҫ�M����(n��i)�桢�����ʡ�ͨ���ԡ��r(ji��)����˵�Ҫ���n�}�x��AT89S52��������оƬ��
AT89S52��һ��(g��)���ģ�������CMOS 8λ��Ƭ�C(j��)��Ƭ��(n��i)��4k Bytes ISP(In-system programmable)�Ŀɷ���(f��)����(xi��)1000�ε�Flashֻ�x����惦(ch��)������������ATMEL��˾�ĸ��ܶȡ�����ʧ�Դ惦(ch��)���g(sh��)���죬���ݘ�(bi��o)��(zh��n)MCS-51ָ��ϵ�y(t��ng)��80C51���_�Y(ji��)��(g��u)��оƬ��(n��i)������ͨ��8λ����̎������ISP Flash�惦(ch��)��Ԫ������(qi��ng)�����Ӌ(j��)��C(j��)��AT89S52�ɞ��S��Ƕ��ʽ���Ƒ�(y��ng)��ϵ�y(t��ng)�ṩ����?x��n)r(ji��)�ȵĽ�Q������AT89S52оƬ������������[[]4��
��ָ���оƬ���_�cIntel��˾��8051���ݣ�
��4KBƬ��(n��i)��ϵ�y(t��ng)�ɾ���Flash����惦(ch��)����
�ەr(sh��)��l�ʞ�0��33MHz��
��128�ֹ�(ji��)Ƭ��(n��i)�S�C(j��)�x��(xi��)�惦(ch��)����RAM����
��32��(g��)�ɾ���ݔ��/ݔ�����_��
��2��(g��)16λ���r(sh��)/Ӌ(j��)��(sh��)����
��6��(g��)�Д�Դ��2��(j��)��(y��u)�ȼ�(j��)��
��ȫ�p������ͨ�Žӿڣ�
��O(ji��n)ҕ���r(sh��)����
��2��(g��)��(sh��)��(j��)ָᘡ�
AT89S52��Ƭ�C(j��)��40��(g��)���_����2��(g��)��(zhu��n)�������Դ���_��2��(g��)��Ӿ�������_��4��(g��)���ƻ��c�����Դ��(f��)�õ����_���Լ�32�lݔ��ݔ��I/O���_[[]5��
AT89S52��Ƭ�C(j��)���_�D��D2-1��ʾ��
�D2-1 ��Ƭ�C(j��)���_�D
2.1.2 ϵ�y(t��ng)�������x��ϵ�y(t��ng)���É�늂�������һ�N���͵���Դ���������ַQ(ch��ng)�l(f��)�ʽ���������乤��ԭ���ǻ���ijЩ������������������(y��ng)���ض�����a(ch��n)��늺ɵĉ��Ч��(y��ng)��
��늂������w�eС�������p���Y(ji��)��(g��u)��(ji��n)�Ρ������ɿ����m���ڄ�(d��ng)�B(t��i)���W(xu��)���Ĝy(c��)�������m�Ϝy(c��)�l��̫�͵ı��y(c��)���������ܜy(c��)�o�B(t��i)����Ŀǰ�����ڼ��ٶȺ̈́�(d��ng)�B(t��i)�������Ĝy(c��)����������������c(di��n)���߃�(n��i)�衢С���ʡ�����С��ݔ��������������|�ķֲ���ݼ����ɔ_Ӱ�ݔ�����ԣ��@��(du��)����·Ҫ��ܸߡ�
��葪(y��ng)׃ʽ��������һ�N������葪(y��ng)׃Ч��(y��ng)�������N���W(xu��)���D(zhu��n)�Q�����̖(h��o)�ĽY(ji��)��(g��u)�͂���������葪(y��ng)׃Ƭʽ��葪(y��ng)׃ʽ�������ĺ���Ԫ�����乤��ԭ���ǻ��ڲ��ϵ���葪(y��ng)׃Ч��(y��ng)����葪(y��ng)׃Ƭ���ɆΪ�(d��)���������ʹ�ã�������������Ԫ���Y(ji��)�Ϗ���Ԫ����(g��u)�����W(xu��)����������
��(d��o)�w������S���C(j��)е׃�ζ��l(f��)��׃���ĬF(xi��n)�������葪(y��ng)׃Ч��(y��ng)����葪(y��ng)׃Ƭ�љC(j��)е��(y��ng)׃��̖(h��o)�D(zhu��n)�Q���R/R�����ڑ�(y��ng)׃��������(y��ng)���׃��һ�㶼��С���y��ֱ�Ӿ��_�y(c��)�����Ҳ���̎������ˣ�Ҫ�����D(zhu��n)�Q�·�ё�(y��ng)׃Ƭ�ġ�R/R׃���D(zhu��n)�Q��늉������׃�������D(zhu��n)�Q�·���Üy(c��)��늘�
ֱ��늘�����c(di��n)����̖(h��o)����(hu��)�ܸ�Ԫ���͌�(d��o)���ķֲ�늸м���ݵ�Ӱ푣����ɔ_������(qi��ng)������C(j��)е��(y��ng)׃��ݔ����̖(h��o)С��Ҫ���ø�����߷�(w��n)���ԵķŴ����Ŵ�
�D2-2��һֱ����늵�ƽ�����늘� ��ֱ���ԴE��
��ֱ���ԴE��
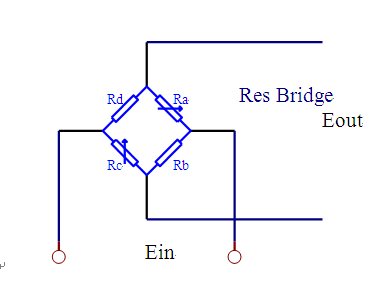
�D2-2 ��������(n��i)���B�ӈD
��(d��ng)늘�ݔ���˽ӟo(w��)�F��ؓ(f��)�d���r(sh��)����ҕݔ���˞��_(k��i)·���˕r(sh��)ֱ��늘�Q(ch��ng)��늉���ֻ��늉�ݔ����
��(d��ng)�����Դ�ă�(n��i)��r(sh��)���ɷ։�ԭ���У�


= ��2.1��
��(d��ng)�M��l��R1R3=R2R4�r(sh��)����

��2.2��
 =0����늘�ƽ�⡣ʽ��2.2���Q(ch��ng)ƽ��l����
=0����늘�ƽ�⡣ʽ��2.2���Q(ch��ng)ƽ��l����
��(y��ng)׃Ƭ�y(c��)��늘��ڜy(c��)��ǰʹ늘�ƽ�⣬�Ķ�ʹ�y(c��)���r(sh��)늘�ݔ��늉�ֻ�c��(y��ng)׃Ƭ���ܵđ�(y��ng)׃����������׃�����P(gu��n)��
�����(d��ng)��������R1=R-��R,R2=R+��R,R3=R-��R��R4=R+��R,��ʽ��2.1�����t늘�ݔ����


 (2.3)
(2.3)
��(y��ng)׃Ƭʽ���������������c(di��n)��
��1����(y��ng)�ú͜y(c��)�������V����(y��ng)׃Ƭ���Ƴɸ��N�C(j��)е����������
��2���ֱ������`���ȸߣ������^�ߡ�
��3���Y(ji��)��(g��u)�pС����(du��)ԇ��Ӱ�С�� ��(du��)��(f��)�s�h(hu��n)���m��(y��ng)�ԏ�(qi��ng)�����ڸߜء��߉�����(qi��ng)�ň�(ch��ng)������h(hu��n)����ʹ�ã��l��푑�(y��ng)�á�
��4����Ʒ����ʹ�÷��㣬���ڌ�(sh��)�F(xi��n)�h(yu��n)���x���Ԅ�(d��ng)���y(c��)��[5]��
ͨ�^(gu��)��(du��)�����������c��葪(y��ng)׃ʽ���������^��������K�x���˵ڶ��N�������}ĿҪ��Q(ch��ng)�ط���0��5Kg,�M�������`����� 0.005Kg�����]�����_(t��i)���ء����(d��ng)�͛_��������߀Ҫ���ⳬ��?f��)p�Ă����������Ԃ��������̱�횴����~���Q(ch��ng)��5Kg���҂��x�������葪(y��ng)׃Ƭ���������������̞�5Kg�����Ȟ�0.01% ���M�㱾ϵ�y(t��ng)�ľ���Ҫ��
0.005Kg�����]�����_(t��i)���ء����(d��ng)�͛_��������߀Ҫ���ⳬ��?f��)p�Ă����������Ԃ��������̱�횴����~���Q(ch��ng)��5Kg���҂��x�������葪(y��ng)׃Ƭ���������������̞�5Kg�����Ȟ�0.01% ���M�㱾ϵ�y(t��ng)�ľ���Ҫ��
2.1.3 ϵ�y(t��ng)AD�D(zhu��n)�QоƬ�x��HX711��һ�(zhu��n)��߾�����ӳӶ��O(sh��)Ӌ(j��)��24λA/D�D(zhu��n)�Q��оƬ���cͬ�(l��i)������оƬ��ȣ�ԓоƬ�����˰�����(w��n)���Դ��Ƭ��(n��i)�r(sh��)���ʎ��������ͬ�(l��i)��оƬ����Ҫ������·�����м��ɶȸߡ�푑�(y��ng)�ٶȿ졢���ɔ_�ԏ�(qi��ng)�ȃ�(y��u)�c(di��n)����������ӳӵ����C(j��)�ɱ�����������C(j��)�����ܺͿɿ��ԡ�ԓоƬ�c���MCU оƬ�Ľӿں;��̷dz���(ji��n)�Σ����п�����̖(h��o)�ɹ��_�(q��)��(d��ng)���o(w��)�茦(du��)оƬ��(n��i)���ļĴ������̡�ݔ���x���_(k��i)�P(gu��n)�������xȡͨ��A ��ͨ��B���c���(n��i)���ĵ����ɾ��̷Ŵ������B��ͨ��A �Ŀɾ��������128 ��64����(du��)��(y��ng)�ĝM�~�Ȳ��ݔ����̖(h��o)��ֵ�քe���20mV���40mV��ͨ��B �t��̶���64 ����[[]9������ϵ�y(t��ng)����(sh��)�z�y(c��)��оƬ��(n��i)�ṩ�ķ�(w��n)���Դ����ֱ�����ⲿ��������оƬ��(n��i)��A/D �D(zhu��n)�Q���ṩ�Դ��ϵ�y(t��ng)���ϟo(w��)�������ģ�M�Դ��оƬ��(n��i)�ĕr(sh��)���ʎ������Ҫ�κ��������������Ԅ�(d��ng)��(f��)λ���ܺ�(ji��n)�����_(k��i)�C(j��)�ij�ʼ���^(gu��)�̡�оƬ���_�D��D2-3��ʾ��
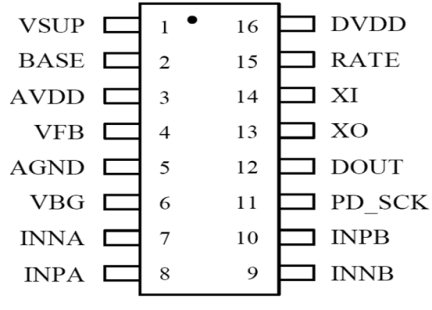
�D2-3 HX711���_���x
HX711���͑�(y��ng)���·��D2-4��ʾ��
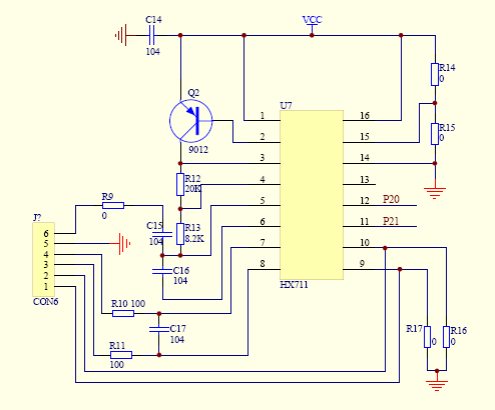
�D2-4 HX711���͑�(y��ng)���·
2.1.4ϵ�y(t��ng)�@ʾ���x������һ ��(sh��)�a���@ʾ
��(sh��)�a����һ�N�댧(d��o)�w�l(f��)���������������Ԫ�ǰl(f��)����O�ܡ���(sh��)�a�ܰ��Δ�(sh��)�֞��߶Δ�(sh��)�a�ܺͰ˶Δ�(sh��)�a�ܣ��˶Δ�(sh��)�a�ܱ��߶Δ�(sh��)�a�ܶ�һ��(g��)�l(f��)����O�܆�Ԫ����һ��(g��)С��(sh��)�c(di��n)�@ʾ���������@ʾ���ق�(g��)��8���ɷ֞�1λ��2λ��4λ�ȵȔ�(sh��)�a�ܣ����l(f��)����O�܆�Ԫ�B�ӷ�ʽ�֞鹲�(y��ng)�O��(sh��)�a�ܺ�ꎘO��(sh��)�a�ܡ����(y��ng)��(sh��)�a����ָ�����аl(f��)����O�ܵ��(y��ng)�O�ӵ�һ���γɹ����(y��ng)�O(COM)�Ĕ�(sh��)�a�ܡ����(y��ng)��(sh��)�a���ڑ�(y��ng)�Õr(sh��)��(y��ng)�������OCOM�ӵ�+5V����(d��ng)ijһ�ֶΰl(f��)����O�ܵ�ꎘO����ƽ�r(sh��)������(y��ng)�ֶξ��c(di��n)������(d��ng)ijһ�ֶε�ꎘO����ƽ�r(sh��)������(y��ng)�ֶξͲ�������ꎔ�(sh��)�a����ָ�����аl(f��)����O�ܵ�ꎘO�ӵ�һ���γɹ���ꎘO(COM)�Ĕ�(sh��)�a�ܡ���ꎔ�(sh��)�a���ڑ�(y��ng)�Õr(sh��)��(y��ng)�������OCOM�ӵ��ؾ�GND�ϣ���(d��ng)ijһ�ֶΰl(f��)����O�ܵ��(y��ng)�O����ƽ�r(sh��)������(y��ng)�ֶξ��c(di��n)������(d��ng)ijһ�ֶε��(y��ng)�O����ƽ�r(sh��)������(y��ng)�ֶξͲ�����
��(sh��)�a���@ʾ��Ϣ���ޣ���(d��ng)�@ʾ��Ϣ�^���r(sh��)��Ҫ����(g��)��(sh��)�a�ܼ�(j��)(li��n)���ɣ��@�ӕ�(hu��)���Ӳ���B�ӏ�(f��)�s���ɱ����ӣ���(sh��)�a�܌�(du��)���ַ����ܺܺõ��@ʾ����(d��ng)�B(t��i)����r(sh��)̎�������׳��F(xi��n)�W�q�F(xi��n)��
������ LCD�ַ�Һ���@ʾ
�����c(di��n)��ַ��� LCD Һ���@ʾ��Һ���@ʾģ�K�����w�eС�����ĵ͡��@ʾ��(n��i)���S�������c(di��n)���F(xi��n)���ַ���Һ���@ʾģ�K�ѽ�(j��ng)�dž�Ƭ�C(j��)��(y��ng)���O(sh��)Ӌ(j��)����õ���Ϣ�@ʾ������������LCDҺ���@ʾ��(hu��)����O(sh��)Ӌ(j��)�ɱ����ӡ�
LCD1602�����@ʾ2�� 16 ��(g��)�ַ����� 8 λ��(sh��)��(j��)���� D0-D7���� RS��R/W�� EN ����(g��)���ƶ˿ڣ�����늉��� 5V������?gu��)����ַ��?du��)�ȶ��{(di��o)��(ji��)�ͱ���[10]��
���w���_�f(shu��)�����2-1��ʾ��
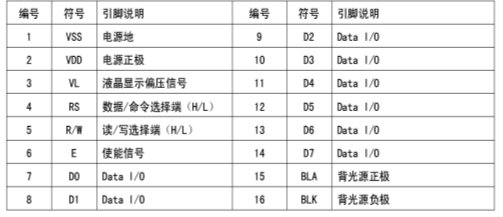
��2-1 LCD1602Һ���@ʾ�����_�f(shu��)��
LCD1602 Һ��ģ�K��(n��i)�����ַ��l(f��)���惦(ch��)����CGROM)�ѽ�(j��ng)�惦(ch��)�� 160 ��(g��)��ͬ ���c(di��n)��ַ��D�Σ���� 1 ��ʾ���@Щ�ַ��У�������?d��ng)?sh��)�֡�Ӣ����ĸ�Ĵ�С��(xi��)�� ���õķ�̖(h��o)�������ļ����ȣ�ÿһ��(g��)�ַ�����һ��(g��)�̶��Ĵ��a�������x��(xi��)������ ��Ļ���(bi��o)�IJ�������ͨ�^(gu��)ָ��́�(l��i)��(sh��)�F(xi��n)�ġ�
���C���˶�����صĿ��]�����˷��������x�� LCD1602 �@ʾ������ϵ�y(t��ng)���@ʾ���档
2.1.5ϵ�y(t��ng)�r(sh��)�оƬ�x��DS1302������(gu��)DALLAS��˾�Ƴ���һ�N�����ܡ����ĵČ�(sh��)�r(sh��)�r(sh��)�оƬ������31�ֹ�(ji��)�o�B(t��i)RAM������SPI�����ӿ��cCPU�M(j��n)��ͬ��ͨ�ţ����ɲ���ͻ�l(f��)��ʽһ���Ͷ���(g��)�ֹ�(ji��)�ĕr(sh��)���̖(h��o)��RAM��(sh��)��(j��)����(sh��)�r(sh��)�r(sh��)犿��ṩ�롢�֡��r(sh��)���ա����ڡ��º��꣬һ��(g��)��С�c31��r(sh��)�����Ԅ�(d��ng)�{(di��o)�����Ҿ����c���a(b��)�����ܡ�����늉����_(d��)2.5��5.5V�������p�Դ��늣����Դ�͂����Դ�������O(sh��)�Â����Դ��늷�ʽ���ṩ�ˌ�(du��)���Դ�M(j��n)��丼�(x��)�����늵������� DS1302���ڔ�(sh��)��(j��)ӛ䛣��e�nj�(du��)ijЩ�����������x�Ĕ�(sh��)��(j��)�c(di��n)��ӛ��ϣ��܌�(sh��)�F(xi��n)��(sh��)��(j��)�c���F(xi��n)ԓ��(sh��)��(j��)�ĕr(sh��)�gͬ�r(sh��)ӛ䛣���ˏV����(y��ng)���ڜy(c��)��ϵ�y(t��ng)�С�DS1302��(sh��)����_�D�քe��D2-5���D2-6��ʾ��

�D2-5 DS1302��(sh��)��D

�D2-6 DS1302���_���x
DS1302�����_�Ĺ��ܞ飺
VCC1�������Դ��VCC2�����Դ����(d��ng)VCC2>VCC1+0.2V�r(sh��)����VCC2��DS1302��늣���(d��ng)VCC2< VCC1�r(sh��)����VCC1��DS1302��늡�
SCLK�����Еr(sh��)犣�ݔ�룻
I/O�������ӿڕr(sh��)���p��(sh��)��(j��)����
CE��ݔ����̖(h��o)�����x����(xi��)��(sh��)��(j��)���g����횞�ߡ�ԓ���_�Ѓɂ�(g��)���ܣ���һ��CE�_(k��i)ʼ�������L��(w��n)��λ�Ĵ����Ŀ���߉����Σ�CE�ṩ�Y(ji��)�����ֹ�(ji��)����ֹ�(ji��)��(sh��)��(j��)��ݔ?sh��)ķ����?/font>
DS1302���P(gu��n)�՚v���r(sh��)�g�ļĴ�������12��(g��)��������7��(g��)�Ĵ������x�r(sh��)81h��8Dh����(xi��)�r(sh��)80h��8Ch������ŵĔ�(sh��)��(j��)��ʽ��BCD�a��ʽ��
2.2 ϵ�y(t��ng)Ӳ���·�O(sh��)Ӌ(j��)2.2.1ϵ�y(t��ng)�Դ�·�O(sh��)Ӌ(j��)����ԓϵ�y(t��ng)�� 51 ��Ƭ�C(j��)�� AD �D(zhu��n)�QоƬ��Һ���@ʾ�����蹩�늉����� 5V 늉�������Ҫ���Cϵ�y(t��ng)��(w��n)���ɿ��Ĺ�������Ҫ�O(sh��)Ӌ(j��)һ��(g��)���Է�(w��n)���ṩ 5V 늉��Ĺ��ϵ�y(t��ng)�����O(sh��)Ӌ(j��)�����p�Դ�ӿڹ�늷�ʽ��USB �ӿڹ�늷�������{(di��o)ԇ��Ҳ�ɲ��������Դ����ϵ�y(t��ng)�Ĺ���Դ���������������˷�(w��n)������ LM7805 ����ϵ�y(t��ng)�Դ�ķ�(w��n)�������Ա��Cϵ�y(t��ng)늉��鷀(w��n)����ֱ�� 5V 늉���ͬ�r(sh��)�����Դ��ݔ��늉�Ҫ���� 5Vݔ����ϵ�y(t��ng)�Դݔ��ӿ�Ҫ�ӞV������Դ_������늉���(w��n)�����Դݔ���ӿڼ���LED �Դָʾ�����Á�(l��i)�ж��Դ�Ƿ�����������ԓϵ�y(t��ng)�Դ�·�O(sh��)Ӌ(j��)��D 2-7��ʾ��
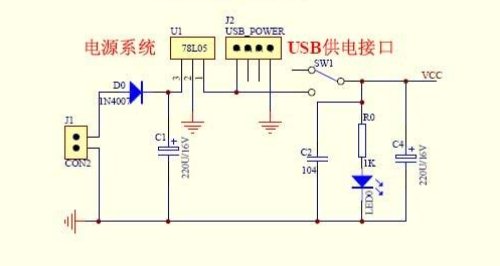
�D2-7�Դ�ӿ��·
C1��C2��(sh��)�F(xi��n)��(du��)�Դ�V�����ԞV�����ܴ��ڵĸ��l�s����(du��)�Դ��Ӱ푣�C4��(sh��)�F(xi��n)��(du��)�Դ늉���ƽ����(w��n)������[10]����(d��ng)USB�ӿ�ݔ��늉��ߕr(sh��)C4�Á�(l��i)��(ch��)�ܣ���(d��ng)���m(x��)�·ؓ(f��)�d�^(gu��)��USB��늲���r(sh��)늽����C4ͨ�^(gu��)ጷŃ�(ch��)�����܁�(l��i)���C�Դ늉������䡣LED0�����Դָʾ������������Դ�����c��R0�Á�(l��i)�������Ա��CLED��������[13]��
2.2.2ϵ�y(t��ng)��Ƭ�C(j��)�����·�O(sh��)Ӌ(j��)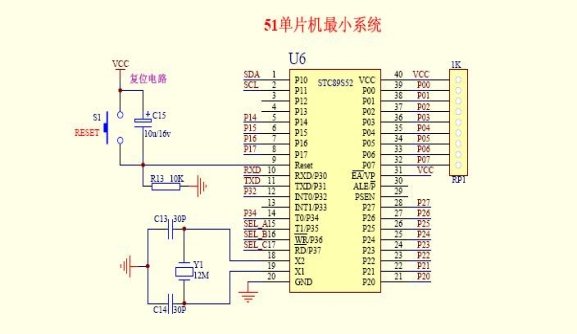 ϵ�y(t��ng)�����·��AT89S52��Ƭ�C(j��)�������·�͏�(f��)λ�·�M�ɣ�ԓ�·��������(g��)ϵ�y(t��ng)���܌�(sh��)�F(xi��n)�ĺ��Ć�Ԫ�����B�ӷ�ʽ��D2-8��ʾ��
ϵ�y(t��ng)�����·��AT89S52��Ƭ�C(j��)�������·�͏�(f��)λ�·�M�ɣ�ԓ�·��������(g��)ϵ�y(t��ng)���܌�(sh��)�F(xi��n)�ĺ��Ć�Ԫ�����B�ӷ�ʽ��D2-8��ʾ��
�D2-8 ��Ƭ�C(j��)����ģ�K�·
����ȫ�Q(ch��ng)�龧�w��ʎ�������������ڮa(ch��n)��ԭʼ�ĕr(sh��)��l�ʣ��@��(g��)�l�ʽ�(j��ng)�^(gu��)�l�ʰl(f��)�����ķŴ��sС��ͳ�����X�и��N��ͬ�Ŀ����l�ʡ�����һ��������w�C��������һ�N�C(j��)�����������늓p�ĺ�С��ʯӢ���w��(j��ng)�����и�ĥ�������늘O�����������ɡ��@�N���w��һ��(g��)����Ҫ�����ԣ�����o��ͨ늣����͕�(hu��)�a(ch��n)���C(j��)е��ʎ����֮������o���C(j��)е�������֕�(hu��)�a(ch��n)��늣��@�N���ԽЙC(j��)�Ч��(y��ng)��������һ��(g��)����Ҫ�����c(di��n)������ʎ�l���c�������Π���ϣ��и����������P(gu��n)������ʯӢ���w���W(xu��)���ܷdz���(w��n)��������Ûϵ��(sh��)�dz�С������ʎ�l��Ҳ�dz���(w��n)�������ڿ��Ǝγߴ���������ܾ��ܣ���ˣ����C���l��Ҳ�ܜ�(zh��n)�_������(j��)ʯӢ���w�ęC(j��)�Ч��(y��ng)���҂���������Ч��һ��(g��)늴���ʎ��·�����C���·�������ęC(j��)�Ч��(y��ng)�ǙC(j��)-�-�C(j��)-�..�IJ����D(zhu��n)�Q����늸к���ݽM�ɵ��C���·��늈�(ch��ng)-�ň�(ch��ng)�IJ����D(zhu��n)�Q�����·�еđ�(y��ng)�Ì�(sh��)�H���ǰ�����(d��ng)��һ��(g��)��Qֵ��늴��C���·������ʯӢ���w�ēp�ķdz�С����Qֵ�dz��ߣ�����ʎ���Õr(sh��)�����Ԯa(ch��n)���dz���(w��n)������ʎ�����V�����ã����ԫ@�÷dz���(w��n)���Ͷ����Ď�ͨ��������[10]��
��(f��)λ�·���ð��I��(f��)λ����늏�(f��)λ��(l��i)��(sh��)�F(xi��n)��S1���(f��)λ���I����(f��)λ���I���º�(f��)λ��ͨ�^(gu��)1K��С����c�Դ��ͨ,Ѹ�ٷ��,ʹRST���_����ƽ,��(f��)λ���I�����,�Դͨ�^(gu��)10K������茦(du��)10��F�����C1���³��,RST���_�˳��F(xi��n)��(f��)λ���}�_��AT89S52��(n��i)����һ��(g��)�����淴��Ŵ���,���ژ�(g��u)����ʎ��,��Ҫ�γɕr(sh��)��}�_,�ⲿ߀�踽���·,���O(sh��)Ӌ(j��)���Ã�(n��i)���r(sh��)犷�ʽ,����оƬ��(n��i)������ʎ��,Ȼ�������_XTAL1��XTAL2�ɶ˿�Ӿ��w��ʎ��,�͘�(g��u)���˷�(w��n)�����Լ���ʎ��,�l(f��)�����}�_ֱ�������(n��i)���r(sh��)��·,C2��C3��ֵͨ���x���30pF����,����Y1�x��12MHz.���˜pС�������,���õر��C��ʎ����(w��n)�����ɿ��ع�������ʎ����ݑ�(y��ng)�M���ܰ��b���c��Ƭ�C(j��)���_XTAL1��XTAL2����[[]7��
��Ƭ�C(j��)��31�_��EA����+5V�Դ����ʾ���Sʹ��Ƭ��(n��i)ROM��
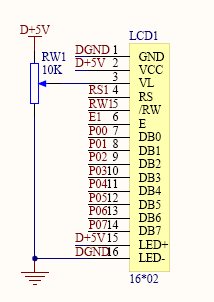
2.2.3ϵ�y(t��ng)�@ʾ�����·�O(sh��)Ӌ(j��)�@ʾ���ֲ���LCD1602Һ���@ʾģ�K��Һ���������������� 5��7�� 5��10�c(di��n)ꇵ��ַ��@ʾλ,ÿ��(g��)�@ʾλ���@ʾ1��(g��)�ַ�����Ҏ(gu��)���Ϸ֞�ÿ�� 8��16��20��24��32��40λ����һ�С����м��������(l��i)�����c��Ƭ�C(j��)���B���·��D2-9��ʾ
�D2-9 Һ���@ʾ�ӿ��·
1�_��2�_��Һ��1602�غ��Դ���_��3�_�鱳���{(di��o)��(ji��)���_��ͨ�^(gu��)10K�λ���ӵأ������ͨ�^(gu��)�λ����(l��i)�{(di��o)��(ji��)���ȣ�4�_��5�_��6�_��Һ��Ƭ�x�������_���քe�B�ӵ���Ƭ�C(j��)��P2.0��P2.1��P2,2�˿ڣ�7~14�_�锵(sh��)��(j��)�ӿڣ��c��Ƭ�C(j��)��P0�����B��(sh��)�F(xi��n)��(sh��)��(j��)�Ă�ݔ��15��16���_��Һ���ı�������_���քe�ӵ��Դ�͵�[9]��
2.2.4ϵ�y(t��ng)���؈�(b��o)��ָʾ�·�O(sh��)Ӌ(j��)���؈�(b��o)��ָʾ�·�Á�(l��i)�ڷQ(ch��ng)�y(c��)���������ֵ�r(sh��)��(b��o)����ʾ����������̫�ߵ���r��?li��n)p�Ă���������(b��o)��ָʾ�·��PNP���O��9012�(q��)��(d��ng)���Q����(l��i)��(sh��)�F(xi��n)����Ƭ�C(j��)IO�ڿ������O�ܵĻ��O����(d��ng)��Ƭ�C(j��)��IO��ݔ������ƽ�r(sh��)�����O�܌�(d��o)ͨ�����Q�������O�c�Դ��ͨ�����Q��ͨ늰l(f��)����(b��o)������(d��ng)��Ƭ�C(j��)IO��ݔ�����ƽ�r(sh��)�����O�ܽ�ֹ�����Q��ֹͣ��(b��o)������(b��o)��ָʾ�·��D2-10��ʾ��
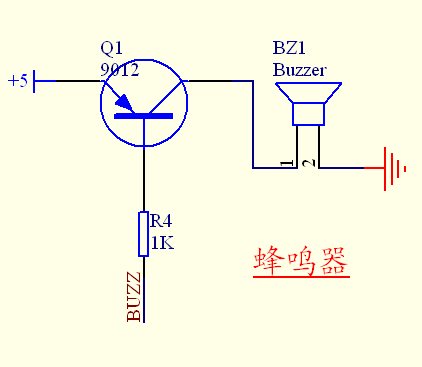
�D2-10��(b��o)��ָʾ�·
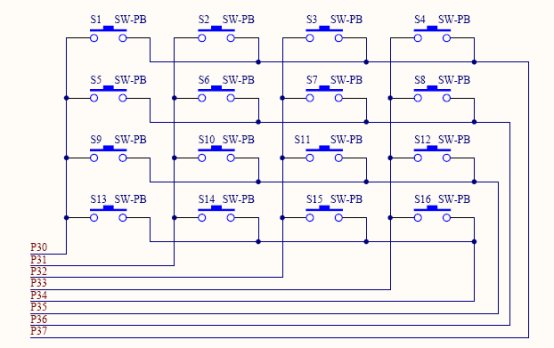
2.2.5ϵ�y(t��ng)���Iݔ���·�O(sh��)Ӌ(j��)���Iݔ���·�Á�(l��i)����ӷQ(ch��ng)�y(c��)���^(gu��)����ݔ��r(ji��)ֵ�����Iݔ���·����4*4����I�P(p��n)��(sh��)�F(xi��n)������I�P(p��n)�·��D2-11��ʾ��
�D2-11���Iݔ���·
��ӷQ(ch��ng)���I���ܷ������2-2��ʾ��
��2-2ϵ�y(t��ng)���I���ñ�
����ӳ����_(k��i)�C(j��)�z�y(c��)�бP(p��n)�����������бP(p��n)�������㣨����ӳ�ÿ���_(k��i)�C(j��)��z�y(c��)�бP(p��n)���������������Ԅ�(d��ng)���бP(p��n)����������һ��(g��)׃���У��Q(ch��ng)���^(gu��)����ÿ�ζ����@�õ������pȥ�бP(p��n)���������õ���Ҫ�Q(ch��ng)�����w����������������
Ӌ(j��)�㹦�ܣ������_ݔ���ˆr(ji��)֮����Ӌ(j��)�㰴�I������(hu��)Ӌ(j��)������~������Һ���@ʾ�����@ʾ���������r(ji��)�����r(ji��)��
����՚v�r(sh��)��I�P(p��n)��壺
��(du��)��(y��ng)����I�P(p��n)���I
ͨ�^(gu��)�O(sh��)�ð��I�����ГQ���ڡ����ڡ��r(sh��)�g���O(sh��)�ã�ͨ�^(gu��)�Ӝp�I��(l��i)�M(j��n)�и���(g��)��B(t��i)���{(di��o)��(ji��)��
2.3ϵ�y(t��ng)Ӳ���·���L���cPCB��·������2.3.1 Protell 99 SEܛ����B������Ӳ���·���O(sh��)Ӌ(j��)�^(gu��)���У�ԭ��D��PCB���L�Ʋ���Protel99SEܛ����Protel99SE�Ǒ�(y��ng)����Windows9X/2000/NT����ϵ�y(t��ng)�µ�EDA�O(sh��)Ӌ(j��)ܛ����ԓܛ�����了(ji��n)���ײ����ă�(y��u)��(sh��)һֱ�ԁ�(l��i)������ӹ��̎���ϲ��(��i)�����Ҳ���˺ܶ��У������P(gu��n)��(zhu��n)�I(y��)EDA���ߵı��x�n�̡�
2.3.2 ϵ�y(t��ng)ԭ��D�L���cPCBӡˢ��·����������Protel99SEܛ���L��ԭ��D��PCB����Ҫ���E����������
- ����ϵ�y(t��ng)����ԭ����(k��)��
- ���d����ԭ����(k��)�������(xi��ng)Ŀ�У�
- ��ԭ��D�(y��)���з�������Ԫ����������늚������B�Ӹ�Ԫ����
- ����ԭ�����b��(k��)�����d�������ļ��У�
- �L�ƺ��·���M(j��n)��ERC늚�z�y(c��)�������ɾW(w��ng)�j(lu��)����
- �ڹ����н���PCB�ļ�����(d��o)�����ɵľW(w��ng)�j(lu��)����
- ���վW(w��ng)�j(lu��)�w����ʾ�L��PCB��������DRC�z�y(c��)[13]��
�������ϲ��E��K����L�Ƶ��·�D�cPCB�D�քe��D2-12��2-13��ʾ��
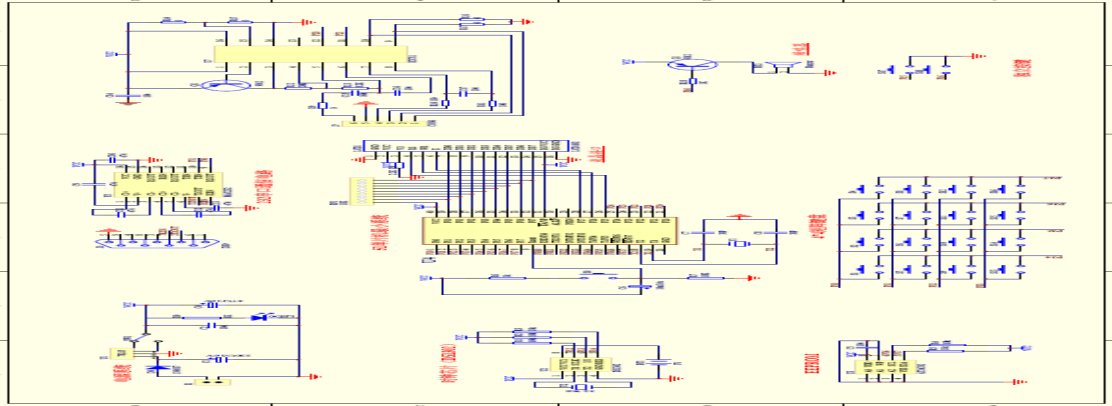
�D2-12 ϵ�y(t��ng)�·ԭ��D
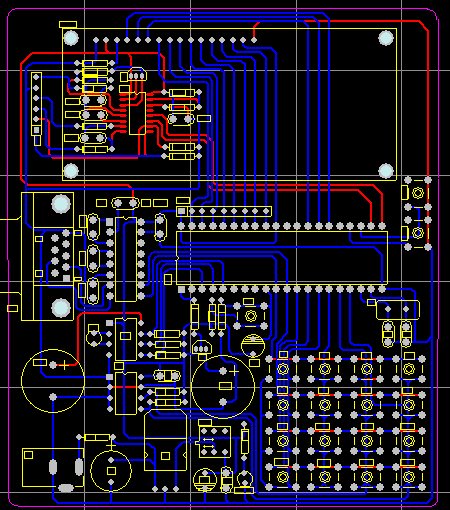
�D2-13 ϵ�y(t��ng)PCBӡˢ��·��D
��3�� ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
3.1 ϵ�y(t��ng)ܛ�����̭h(hu��n)����Bϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)����C�Z(y��)�Ծ��̣����g�h(hu��n)����keil UV3��
keil c51 ������(gu��)Keil Software ��˾��Ʒ��51 ϵ�м��݆�Ƭ�C(j��)C �Z(y��)��ܛ���_(k��i)�l(f��)ϵ�y(t��ng)���ͅR����ȣ�C �ڹ����ϡ��Y(ji��)��(g��u)�ԡ����x�ԡ��ɾS�o(h��)���������@�ă�(y��u)��(sh��)������W(xu��)���á�
Keil c51 ܛ���ṩ�S���Ď�(k��)����(sh��)����(qi��ng)��ļ����_(k��i)�l(f��)�{(di��o)ԇ���ߣ�ȫWindows ���档������Ҫ��һ�c(di��n)��ֻҪ��һ�¾��g�����ɵąR�����a�������w��(hu��)��keil c51 ���ɵ�Ŀ��(bi��o)���aЧ�ʷdz�֮�ߣ�����(sh��)�Z(y��)�����ɵąR�����a�ܾo�����������⡣���_(k��i)�l(f��)����ܛ���r(sh��)�����w�F(xi��n)��(j��)�Z(y��)�Եă�(y��u)��(sh��)��
Keil C51 ������ɾ������g���B�ӡ��{(di��o)ԇ�����������(g��)�_(k��i)�l(f��)���̡��_(k��i)�l(f��)�ˆT����IDE ����������������C ��R��Դ�ļ���Ȼ��քe��C51 ��A51 �������g�B�����Ɇ�Ƭ�C(j��)�Ɉ�(zh��)�еĶ��M(j��n)���ļ���.HEX����Ȼ��ͨ�^(gu��)��Ƭ�C(j��)�ğ���(xi��)ܛ����HEX �ļ������Ƭ�C(j��)��(n��i)��ܛ����Ҫ����(g��)���棺һ�dz�ʼ��ϵ�y(t��ng)�����ǰ��I�z�y(c��)�����ǔ�(sh��)��(j��)�ɼ�����(sh��)��(j��)̎�����M(j��n)���@ʾ���@����(g��)����IJ����քe���������Ё�(l��i)�M(j��n)�С��������ģ�K���ĽY(ji��)��(g��u)���@�ӳ���Y(ji��)��(g��u)��������̺����x�Ժã�Ҳ�����{(di��o)ԇ���ġ�
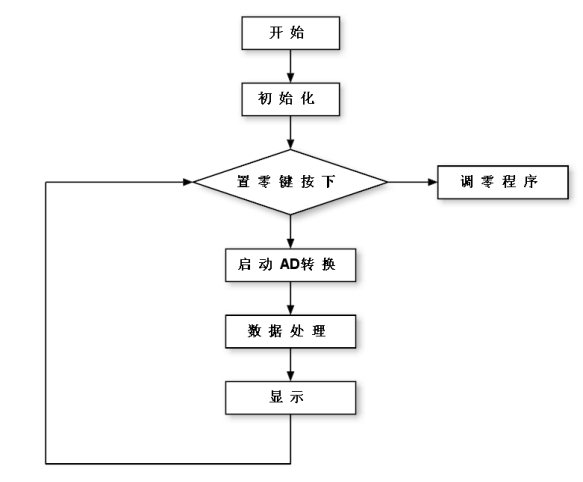
3.2ϵ�y(t��ng)���������̈Dϵ�y(t��ng)ܛ���������������̈D��D3-1��ʾ
�D3-1 ϵ�y(t��ng)���������̈D
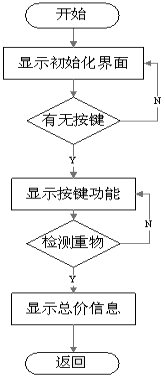
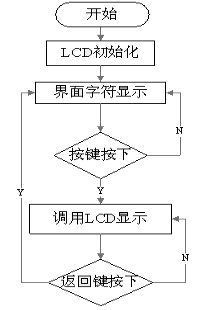
3.3ϵ�y(t��ng)�@ʾ�������̈Dϵ�y(t��ng)ʾ�ӳ�����Ҫ�ǁ�(l��i)�Д��Ƿ���Ҫ�@ʾ,�Լ����ȥ�@ʾ,Ҳ��ʮ����Ҫ�ij���֮һ���O(sh��)Ӌ(j��)���̈D��D3-2��ʾ��
�D3-2ϵ�y(t��ng)�@ʾ�������̈D
3.4ϵ�y(t��ng)���I�{(di��o)���������̈D�I�P(p��n)�·�O(sh��)Ӌ(j��)��4X4���ʽ���ڳ����п������Дఴ�I���a��Ȼ�����(j��)���a���I�P(p��n)�����Ĕ�(sh��)ֵ�͵�����(y��ng)�Ĵ惦(ch��)��Ԫ�����M(j��n)�й����x���(sh��)��(j��)̎�����O(sh��)Ӌ(j��)���̈D��D3-3��ʾ��
�D3-3 ���I�{(di��o)���������̈D
�����¡�ϵ�y(t��ng)�����������b�c�{(di��o)ԇ
4.1�·���L���cPCB���������ϵ�y(t��ng)���·ԭ��D�O(sh��)Ӌ(j��)���Ժ���һ�����������M(j��n)�Ќ�(sh��)�������ˣ�����(sh��)�������ĵ�һ�����nj�(du��)�·�M(j��n)���Ű沼�����mȻPROTEL99 SEܛ�����Ԅ�(d��ng)���ֲ����Ĺ��ܣ����ǣ���߀���x�����ք�(d��ng)�������mȻ���ܲ��IJ��Ǻ�Ư�������Ǻܶ���(w��n)�}��ֻ���H�Ԅ�(d��ng)���ˣ��ŕ�(hu��)�l(f��)�F(xi��n)��PCB�������������ׂ�(g��)���档
1. �·ԭ��D�IJ���
���������ֵ��^(gu��)���Б�(y��ng)ע�������c(di��n)����1��һ��(g��)ģ�K���丽�ٵ�һЩ���xԪ������(y��ng)�M���ŵ�һ�𣻣�2����ͬ���·ģ�K�M������������ʹ�����{(di��o)ԇ�^(gu��)���ж��·�ęz���܉�һĿ��Ȼ����3���^���װl(f��)���Ԫ�����M���ŵ��·��߅����������ɢ�ᡣ
2. ����
PCB�����ĺÉČ�(du��)ϵ�y(t��ng)������ֱ�ӵ�Ӱ푣��ڸ��l�·���F(xi��n)���Ȟ�ͻ�������ԣ����M(j��n)���·�����r(sh��)߀��ע�������c(di��n)����1��ģ�M�غ͔�(sh��)�ֵؑ�(y��ng)���_(k��i)�ӵأ����┵(sh��)����̖(h��o)��ģ�M��̖(h��o)��(hu��)��ɔ_����2��ÿһ���߾����ܶ̄t�̣���Ҫ����äĿ�����������@�h(yu��n)·����?y��n)龀Խ�����ԽС���ɔ_Ҳ��(hu��)ԽС����3���Դ���͵ؾ��M�����·���߅���߾������Դ���M����(hu��)�ı�һ�㾀���Դ�һЩ����4���߾��ڸ�׃����r(sh��)��(y��ng)ԓ��45��ǻ�����������ֱ�ǵĹսǡ�
3. ��ӡ�c�D(zhu��n)ӡ
��ӡ�r(sh��)Ҫע���ͼ������ۯB����ӡ���O(sh��)�ñ�횜�(zh��n)�_��ֻ���µӵ��߾��ͺ��P(p��n)�������D(zhu��n)ӡ�r(sh��)���ȸ��~��Ҫˢϴ�Ƀ����������D(zhu��n)ӡ�r(sh��)��ī������ȫ���D(zhu��n)ӡ����Σ��D(zhu��n)ӡ�C(j��)����A(y��)�ᵽ�C(j��)���l(f��)����ʾ�����@�������D(zhu��n)ӡ�C(j��)�ѽ�(j��ng)��(zh��n)����D(zhu��n)ӡ�ˣ��������D(zhu��n)ӡ�C(j��)���D(zhu��n)ӡ�ٶșnλ��(y��ng)���ڡ��������nλ�����ӵ��(l��i)�͑�(y��ng)���ڡ�ӡˢ�塱 �nλ�����ģ����D(zhu��n)ӡ�r(sh��)��ע���ͼ��ϵ��߾��D����܉������ĸ��ڸ��~���ϣ�һ�K��������D(zhu��n)ӡ�ɴΣ��_������ī��ȫ���D(zhu��n)ӡ�����~���ϡ�
4. ���g
���ͼ��ϵ��·�D�D(zhu��n)ӡ�����~�������Ҫ�Ѷ�����~���g�������^(gu��)�ڄ��D(zhu��n)ӡ�õĕr(sh��)�����ȑ�(y��ng)�z���Ƿ��D(zhu��n)ӡ���������Дྀ���߾����ĵĆ�(w��n)�}���������ī�P���ྀ�a(b��)����(l��i)�����ĵ��߾����������_���D(zhu��n)ӡ������ɺͿ��Ԍ��·�����FeCl3��Һ���M(j��n)�и��g�ˣ��Q(ch��ng)�����塱������Зl�������Ԍ����gҺ�ӟᣬ�ٷ����·�壬�@���܉���Ч����߸��g���ٶȡ�
5. ���
���g�õİ��ӣ���ϴ��֮��Ϳ��Դ���ˣ���וr(sh��)����Ҫע��Ĵ�С���܌����P(p��n)���~����ȫ�������t���ӕr(sh��)�����P(p��n)�](m��i)���~���͟o(w��)���M(j��n)�к����ˡ�
������ɣ���ɰ����ë��ĥƽ���@���·�D���L���cPCB����������������ˡ�
4.2 ϵ�y(t��ng)���{(di��o)ԇ�·�匍(sh��)�������Ժ���(l��i)�Ĺ��������{(di��o)ԇ���@����Փָ��(d��o)��(sh��)�`����Ҫ��һ�����{(di��o)ԇ������Ҫ�����c���ġ��������{(di��o)ԇ�^(gu��)���б�횱������o���^�X���^��(qi��ng)���·����������һ��(g��)ϵ�y(t��ng)���{(di��o)ԇ��ҪܛӲ���Y(ji��)���{(di��o)ԇ��
��ܛӲ���Y(ji��)���{(di��o)ԇ���^(gu��)�����������Ć�(w��n)�}��
1������·���O(sh��)Ӌ(j��)�Ќ�(du��)���NӰ����صĿ��]������ȫ�������ڌ�(du��)�^(gu��)늉���r��̎����δ��������ʩ��
2��ϵ�y(t��ng)�O(sh��)Ӌ(j��)����(y��u)�����д����ơ�����ϵ�y(t��ng)�ij�������̖(h��o)ֱ���Ɇ�Ƭ�C(j��)�����(b��o)���·���](m��i)���O(sh��)Ӌ(j��)���o(h��)�·�����Ƭ�C(j��)̎���������(b��o)���·��
3���](m��i)�ДU(ku��)չ�����·����ض��@ʾ���ܣ�ͨӍ�ӿ��·�c��λ�C(j��)��PC�C(j��)���M(j��n)��ͨӍ����λ�C(j��)�@ʾ���Ķ�����������Ʒ��(sh��)��(j��)������λ�C(j��)��Ȼ��ͨ�^(gu��)���ڻ�ͨӍ�c��ӷQ(ch��ng)���B���_(d��)���h(yu��n)���x���Ƶ�Ŀ�ġ�
4����(du��)���N��(sh��)��оƬ�r(ji��)���˽ⲻ���x��������Ƿȱ�������x�ķQ(ch��ng)�������r(ji��)���^�F���@Щ�����ҽ��ČW(xu��)��(x��)���������˷e�O��Ӱ푡�
������ ���Y(ji��)�c�w��(hu��)
5.1 ���Y(ji��)���IJ���AT89S52��Ƭ�C(j��)Ӌ(j��)�����Ӌ(j��)�س�, �o(w��)Փ��Ӌ(j��)������, ߀�Ƿ�(w��n)���Զ��M���(gu��)�Ҍ�(du��)A��(j��)��ӳӵ�Ҫ��, �������^�õĘ�(bi��o)��У��(zh��n)����, ���ܷ�(w��n)��, ������(ji��n)��, �r(ji��)�������ԓ��ӳӼ����������g(sh��)��Ӌ(j��)��C(j��)���g(sh��)����(sh��)���@ʾ���g(sh��)��һ�w���䷴��(y��ng)�`������(zh��n)�_�ȸߡ��@ʾֱ�^������ʹ�á�ͨ�^(gu��)Ӳ���������U(ku��)չ��ܛ������, ���O(sh��)Ӌ(j��)�����܃�(y��u)Խ��Ӌ(j��)�r(ji��)�ӡ�����_(t��i)�ӵ�, �M����и��I(y��)��(du��)�F(xi��n)����Ӻ��������������ԼӔU(ku��)չ��ԓ��ӳ�߀���c�������a(ch��n)�|(zh��)������ϵ�y(t��ng)�(xi��ng)�B�ӣ������ƏV��(y��ng)�Ãr(ji��)ֵ��
�������ӳ�ܛ���M�ɲ���չ��һ�����İl(f��)չ��
����������(g��)���I(y��)�O(sh��)Ӌ(j��)�^(gu��)���У��Ҍ�(du��)��W(xu��)�������W(xu��)��֪�R(sh��)����һ��(g��)ϵ�y(t��ng)���J(r��n)�R(sh��)�����⣬�����nj�(du��)���n�}���õ��Ć�Ƭ�C(j��)�������P(gu��n)֪�R(sh��)�����M(j��n)һ�������գ���(du��)���Æ�Ƭ�C(j��)�M(j��n)�п���ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c�_(k��i)�l(f��)�ּ���(du��)ϵ�y(t��ng)�ķ����͆�(w��n)�}�Ľ�Q�����������J(r��n)�R(sh��)���w��(hu��)�������^�W(xu��)�����ã��ڴˌ�(sh��)�`�^(gu��)�������L(zh��ng)��֪�R(sh��)���S���˽�(j��ng)�(y��n)������˽�Q��(w��n)�}��������ϵ�y(t��ng)�ķ����c�O(sh��)Ӌ(j��)�^(gu��)���nj�(du��)�W(xu��)��(x��)�Ŀ��Y(ji��)�^(gu��)�̣������M(j��n)һ���W(xu��)��(x��)��̽�����^(gu��)�̡�����ϵ�y(t��ng)���_(k��i)�l(f��)�O(sh��)Ӌ(j��)��һ�(xi��ng)��(f��)�s��ϵ�y(t��ng)���̣���횇�(y��n)����ϵ�y(t��ng)������ϵ�y(t��ng)�O(sh��)Ӌ(j��)��ϵ�y(t��ng)��(sh��)ʩ��ϵ�y(t��ng)�\(y��n)���c�{(di��o)ԇ���^(gu��)�́�(l��i)�M(j��n)�С�ϵ�y(t��ng)�ķ������O(sh��)Ӌ(j��)���(xi��ng)������Ĺ�����ͬ�r(sh��)Ҳ��һ��(g��)��M��(l��)Ȥ���^(gu��)�̣����O(sh��)Ӌ(j��)�^(gu��)���У�Ҫ߅�W(xu��)��(x��)��߅��(sh��)�`��������(w��n)�}�Ͳ���̽����Ŭ������ʹ��(w��n)�}�õ���Q��
��Փ�͌�(sh��)�H��횾o�ܽY(ji��)�ϣ����O(sh��)Ӌ(j��)��Ҫᘌ�(du��)��ͬ��ϵ�y(t��ng)����(j��)��Փ�o�c��ͬ�ķ������C�Ͽ��]����������غ���Ҫ���x�����ѵķ����c�Y(ji��)Փ��
���n�}ܛ����Ӳ����Y(ji��)�ϣ����ஔ(d��ng)����y�ȣ�ͬ�r(sh��)Ҳ�кܴ�Č�(sh��)���ԡ��������I(y��)�O(sh��)Ӌ(j��)���^(gu��)���У��ҵ���Փ�͌�(sh��)�`ˮƽ�������^�����ߡ��ڱ��n�}���O(sh��)Ӌ(j��)�У����쾚�����ˆ�Ƭ�C(j��)Ӳ���O(sh��)Ӌ(j��)�ͽӿڼ��g(sh��)��ͬ�r(sh��)��(du��)�Q(ch��ng)��������ԭ������(y��ng)������һ�����˽⣬�����˸��N�����·�������P(gu��n)Ԫ������ʹ�á�ͨ�^(gu��)�@�ή��I(y��)�O(sh��)Ӌ(j��)���Ҳ��H�W(xu��)��(hu��)��Ό����W(xu��)��(zhu��n)�I(y��)֪�R(sh��)�\(y��n)�õ���(sh��)�H�����У�߀�W(xu��)��(hu��)��ο˷�δ֪�����y����Q�y�}�ķ�����
5.2 �w��(hu��)���I(y��)�O(sh��)Ӌ(j��)�K�ڽY(ji��)���ˣ��@��ζ���ҵĴ�W(xu��)���������һ�(xi��ng)�΄�(w��)Ҳ����ˣ��ڴˮ��I(y��)�O(sh��)Ӌ(j��)�^(gu��)���У�얹������ڴ�W(xu��)4���(n��i)�W(xu��)�^(gu��)��֪�R(sh��)�������dž�Ƭ�C(j��)��C�Z(y��)�Ծ��̷����֪�R(sh��)��ͬ�r(sh��)ͨ�^(gu��)�@�ή��O(sh��)����ˆ�Ƭ�C(j��)���̵������������ǫ@�õ�ܛ���{(di��o)ԇ��(j��ng)�(y��n)��ͬ�r(sh��)�˽���������P(gu��n)�I(l��ng)���֪�R(sh��)����(du��)���Ĺ����W(xu��)��(x��)�����O��Ď�����
���ڕr(sh��)�g̫�}(c��ng)�٣���(j��ng)�(y��n)���㣬��Փ����Ҳ����(y��ng)�Ĵ��ڲ��㣬���ϗl�����ޣ��Դ�����һЩ�O(sh��)Ӌ(j��)����Ć�(w��n)�}����(g��)�˼���Ҳ�д���ߡ���Փ֪�R(sh��)߀Ҫ얹̼ӏ�(qi��ng)�����nj��F�Č�(sh��)�`��(j��ng)�(y��n)߀�nj�(du��)�Լ�����������O��Ď�����
�����īI(xi��n)
[[1] Ѧ���x,������.��MCS-516ϵ�І�Ƭ��Ӌ(j��)��C(j��)����(y��ng)�á�[M].������ͨ��W(xu��)������,1999
[2] �Ї�(gu��)�C(j��)е���I(y��)�����f(xi��)��(hu��) �M��.����Ƭ�C(j��)ԭ���c��(y��ng)�á�.�C(j��)е���I(y��)������.2001
[3] �S�^����������������ԭ������(y��ng)�Ì�(sh��)����[A]�������]늳����磬1998
[4] ����ؑ�� ����(sh��)����Ӽ��g(sh��)��[M] ������ӿƼ���W(xu��)������ 2000
[5] ����r��.��8051��Ƭ�C(j��)��(sh��)��(j��)��ݔ�ӿڔU(ku��)չ���g(sh��)�c��(y��ng)�Ì�(sh��)����[M]�����]늳����磬2005��
[6] ���R����Ⱥ�F.����Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)���g(sh��)��[M].��ӹ��I(y��)�����磬2007
[7] ��V�� ����Ƭ�C(j��)���A(ch��)��[M],�������պ����W(xu��)������,2001
[8] �ھ���51ϵ�І�Ƭ�C(j��)C�����O(sh��)Ӌ(j��)�c��(y��ng)�÷�����[M] �Ї�(gu��)��������� 2002.
[9] ���R����Ⱥ�F ����Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)���g(sh��)��[M].��ӹ��I(y��)�����磬2004
[10] ���静(r��n) ����Ӿ�·�c��Ӽ��g(sh��)��[M].���A��W(xu��)�����磬2005
[11] ͯԊ(sh��)�ף��A��Ӣ.��ģ�M��Ӽ��g(sh��)���A(ch��)��[M]. �ߵȽ���������,2006
[12]�������W(xu��).����Ƭ�C(j��)ԭ������(y��ng)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)��[M].��ӹ��I(y��)������,2005.
[13] ��������Protel99SEԭ��D�cPCB�O(sh��)Ӌ(j��)�̡̳�[M]��ӹ��I(y��)�����磬2004.
[14] ���ѣ���51��Ƭ�C(j��)C�Z(y��)���O(sh��)Ӌ(j��)��(sh��)�����v��[M] ��ӹ��I(y��)������ 2006
[15 ] INTEGRATED CIRCUITS DATA HANDBOOK 80C51-based 8-bit microcontrollers PHILIPS,1992
[16 ] Adel S.Sedra,Kenneth C.Smith:Microelectronics Circuits,3rd Edition,Holt Rinehart and Winston,Inc.,1991
���x����ı��ƌW(xu��)��(x��)���ļ����Y(ji��)��,�ڱ��������I(y��)�O(sh��)Ӌ(j��)�У��õ����ҵČ�(d��o)����Ϥ��ָ��(d��o)�͟o(w��)˽����������(y��n)֔(j��n)?sh��)��ΌW(xu��)�B(t��i)�Ⱥ��t�͵Ğ��˽o����������̵�ӡ��
���n�}���x�}���о��^(gu��)���еõ��������ώ���Ϥ��ָ��(d��o)�����ώ����ԃ(x��n)��(w��n)�о��M(j��n)�̣�������ָ�c(di��n)�Խ������_(k��i)���о�˼·�������c(di��n)�ܡ�����Ą�(l��)�����ώ�һ�z��ƈ�����L(f��ng)����(y��n)֔(j��n)��(sh��)�đB(t��i)�ȣ�̤̤��(sh��)��(sh��)�ľ����x�������ģ����ҽ������ˣ��m�v�r(sh��)���d���s�o�ԽK������o(w��)�F֮����
ͨ�^(gu��)�@�ή��I(y��)�O(sh��)Ӌ(j��)��ʹ�ҵõ���һ���Ì�(zhu��n)�I(y��)֪�R(sh��)����(zhu��n)�I(y��)���ܷ����ͽ�Q��(w��n)�}ȫ��ϵ�y(t��ng)��呟���ʹ���ڂ������Ļ���ԭ�����������Č�(sh��)�H��(y��ng)�ã��Լ��ڳ��Â������O(sh��)Ӌ(j��)˼·���ɵ����շ��涼����ǰ�~��һ�˲������պ�ɞ�ϸ�đ�(y��ng)�����˲Ŵ������õĻ��A(ch��)�����ڣ��ώ��ľ���ָ��(d��o)�͇�(y��n)��Ҫ���£��@�����S������Փ֪�R(sh��)���O�������ˌ�(sh��)�`����������(du��)��(d��ng)ǰ����I(l��ng)����о���r�Ͱl(f��)չ��������һ�����˽⣬�@��(du��)�ҽ���M(j��n)һ���W(xu��)��(x��)�����������֪�R(sh��)�ИO�˵Ď������ڴˣ������ĸ��x�������ώ���ָ��(d��o)��֧�֡���δ��(l��i)�Ĺ����͌W(xu��)��(x��)�У��Ҍ��Ը��õijɿ�(j��)��(l��i)�؈�(b��o)�ώ���
�ڴˣ���߀Ҫ���x��һ�����Ķ��^(gu��)�ˌW(xu��)������ęC(j��)늹���ϵȫ�w�ώ���ͬ�W(xu��)�T(m��n)�����������ゃ�Ď�����֧�֣��Ҳ��ܿ˷�һ��(g��)һ��(g��)�����y���ɻ�ֱ�����ĵ������ɡ�
��Փ�ļ������֮�H���ҵ�����o(w��)��ƽ�o�����_(k��i)ʼ�M(j��n)���n�}��Փ�ĵ������ɣ��ж��ٿɾ��Ď��L(zh��ng)��ͬ�W(xu��)�����ѽo���ҟo(w��)�ԵĎ��������@��Ո(q��ng)�������\(ch��ng)�����x�⣡�����߀Ҫ���x���B(y��ng)���L(zh��ng)�������ĸ�ĸ���x�x�ゃ��

 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664