Һλ�y���V����(y��ng)���ڹ��I(y��)����(j��ng)��(j��)��������I(l��ng)���O(sh��)Ӌ(j��)��ˮ�乩ˮ��ģ�ͣ����ڌ�ˮ��Һλ��̖�M(j��n)�Мy���O(ji��n)��ӛ䛡�
���چ�Ƭ�C(j��)��Һλ�y���b�þ��Мy����(zh��n)�_���؏�(f��)�Ժá����ĵ͡�ʹ�É����L�����c(di��n)���ǏV�����õļ��g(sh��)��������W(xu��)��(x��)�ƌW(xu��)�l(f��)չ�^��ͬ�r(sh��)������O(sh��)����O(sh��)Ӌ(j��)Ҳ������ɳ��m(x��)�l(f��)չ���O(sh��)Ӌ(j��)����ʴˣ��ڻ��چ�Ƭ�C(j��)��Һλ�y���b�û��A(ch��)�ϣ��U(ku��)չ��(sh��)�r(sh��)�O(ji��n)�ء���(sh��)��(j��)�ɼ���Ӌ(j��)��C(j��)����ͨ�ŵȹ��ܣ��Ķ��܉�ͨ�^�ƌW(xu��)�ķ�����Һλ�y���c�y(t��ng)Ӌ(j��)�ƌW(xu��)�Y(ji��)�ϣ������{(di��o)��ˮ�YԴ��������Դ���ġ�
���ď�ϵ�y(t��ng)�����x���cՓ�C��Ӳ���·�O(sh��)Ӌ(j��)��ϵ�y(t��ng)ܛ���c��λ�C(j��)ܛ���O(sh��)Ӌ(j��)�Ȏׂ�(g��)�����B�˻��چ�Ƭ�C(j��)��Һλ�y���O(ji��n)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�^�̣���K��(sh��)�F(xi��n)��Һλ�Č�(sh��)�r(sh��)�y���c�O(ji��n)�ء�����Ŀ��Y(ji��)���O(sh��)Ӌ(j��)�^���г��F(xi��n)�Ć��}����Q��������Ҫ���������@��(sh��)��(j��)��̎���������������M(j��n)һ���O(sh��)Ӌ(j��)�_�l(f��)��˼·��
�����o(j��)40��������Ӌ(j��)��C(j��)���Q������(bi��o)־�������Ӽ��g(sh��)�M(j��n)����һ��(g��)�µ��A�Ρ�1976���Ƭ�C(j��)���Ƴ�������·�O(sh��)Ӌ(j��)�ṩ���µ�˼·��Ҳ���M(j��n)��ģ�M�·��(sh��)���·�l(f��)չ�Ěv�̡�����һƬоƬ�ϼ�����������Ӌ(j��)��C(j��)ϵ�y(t��ng)�������İl(f��)չ����������CMOS�����͆�Ƭ���������c��Ʒ�N����İl(f��)չڅ�ݸ��M(j��n)һ����ʹ�ˆ�Ƭ�C(j��)�ڸ���(g��)�ИI(y��)�đ�(y��ng)�á��@Щ��(y��ng)�ã��ܴ�һ�����w�F(xi��n)�ڹ��I(y��)�����С��ڹ��I(y��)�ϣ�ʹ�Æ�Ƭ�C(j��)���Ԙ�(g��u)����ʽ���ӵĿ���ϵ�y(t��ng)�͔�(sh��)��(j��)�ɼ�ϵ�y(t��ng)��
��Ƭ�C(j��)��(y��ng)�ðl(f��)չѸ�ٶ��V�������^�̿����У���Ƭ�C(j��)�ȿ�������Ӌ(j��)��C(j��)���ֿ�����ֲ�ʽӋ(j��)��C(j��)����ϵ�y(t��ng)�е�ǰ�˙C(j��)�����ģ�M���IJɼ����_�P(gu��n)����ݔ�롢̎���Ϳ���Ӌ(j��)�㣬Ȼ��ݔ��������̖����Ƭ�C(j��)�V�����ڃx���x���У��c��ͬ��͵Ă�������Y(ji��)�ϣ���(sh��)�F(xi��n)�T��늉������ʡ��l�ʡ���ȡ��������ٶȡ���ȡ��������ضȵ��������Ĝy�����ڼ�������O(sh��)���У���Ƭ�C(j��)�яV�������ҕ�C(j��)������C(j��)��늱��䡢��偡����t��ϴ�¡��������ߡ����÷��I��(b��o)���ȸ��N����O(sh��)���С���Ӌ(j��)��C(j��)�W(w��ng)�j(lu��)��ͨ�š��t(y��)���O(sh��)�䡢���̡����ڡ����С����������������պ�����I(l��ng)������ʮ�֏V���đ�(y��ng)�á�
���̑�(y��ng)����Һλ�Ĝy�����÷�����Ҫ�г���������t��y�ࡢ�C(j��)е���ӡ������������y��ȎN���@Щ�y����ʽ��һ��Һλ�Ĝy�����f���и��ă�(y��u)�c(di��n)���ɸ���(j��)��ͬ�đ�(y��ng)�È��Ϻ�Ҫ���M(j��n)���x���磬��Ҋ��Һλ����ϵ�y(t��ng)����ø���(bi��o)��늘O�ȣ��@�N������ʽ�Y(ji��)��(g��u)���γɱ����������ǿ��ƾ��Ȳ��ߣ������M(j��n)�Д�(sh��)ֵ�@ʾ���������������`�������c��λ�C(j��)�M(j��n)����Ϣ�������^���y��
�S���Ƽ��İl(f��)չ��Һλ�y�����g(sh��)څ�����ܻ����ͻ�����ҕ�������O(sh��)Ӌ(j��)˼�����Æ�Ƭ�C(j��)����λ�C(j��)��PC�C(j��)����λ�C(j��)����Ƭ�C(j��)��PC�C(j��)��Y(ji��)�ό�ˮ��Һλ�M(j��n)�Мy���ͱO(ji��n)�ء�ԓ�O(sh��)Ӌ(j��)Ҫ�����һ�������ܻ����ɲ����Ժͷ�(w��n)���Ժá�
�ڹ��r(n��ng)�I(y��)���a(ch��n)�У�������Ҫ�y��Һ�wҺλ���S�����ҹ��I(y��)��Ѹ�ٰl(f��)չ��Һλ�y�����g(sh��)���V����(y��ng)�õ�ʯ�͡��������t(y��)ˎ��ʳƷ�ȸ��и��I(y��)�С��͜�Һ�w��Һ����Һ����Һ�塢Һ����Ȼ�⼰Һ�w������̼�ȣ��õ��V���đ�(y��ng)�ã������A��͜�Һ�w������Ҫ���C�ܳ������d�ɣ��ڰl(f��)늏S����䓏S�У�����������偠t����ˮλ��������ˮλ����݆�C(j��)������ˮλ���ߡ��͉��ӟ���ˮλ�ȣ����O(sh��)�䰲ȫ�\(y��n)�еı��C���ڽ̌W(xu��)�c�ƌW(xu��)�о��У�Ҳ��(j��ng)��������Ҫ�M(j��n)��Һλ���ƵČ�(sh��)�(y��n)�b�á�
���|ʽ�y������ָ�y���Â�����ֱ���c������(n��i)�惦(ch��)Һ�w����|���Ķ��@�Üy������(sh��)�ķ�����
�˹��z�߷������ڜy����Һλ����vʷʮ���ƾá������ý���ʽ�̶��Ƥ�ߜy��Һλ���@�N�������Мy�����Ρ��ɿ��Ըߡ�ֱ�^���ɱ��͵ă�(y��u)�c(di��n)�����˞��x��(sh��)�`��o����(sh��)�F(xi��n)�Ԅ�(d��ng)�z�y�Ͳ�����
��Ҋ������跨����늷����y�ط�����ݷ�������(bi��o)������늵ķ���ز����ȡ��oՓ���ӣ��@Щ�������P(gu��n)�I������Һλ��������Һλ������λ�����D(zhu��n)�Q�ɞ�늉���������迹�ȱ����M(j��n)���̎����������������ƪ��������H���ν�B��ݜy�����Ļ���ԭ����
��������ʹ�õ����ͨ���ɃɉK�A���ΘO���һ��(g��)̽�O�c�ޱژ�(g��u)�ɡ���(d��ng)Һλ��ͬ�r(sh��)��������Ľ�늳���(sh��)�Ͳ�ͬ���������Ҳ��ͬ���ڴ˻��A(ch��)�Ͽ���������D(zhu��n)����늉������ơ��l�ʡ��}���������������M(j��n)�Мy����
���ʽҺλ�y���b��ͨ���Y(ji��)��(g��u)���Ρ��`���ȸߡ���(w��n)���Ժá���(d��ng)�B(t��i)푑�(y��ng)�죬�m���ڐ��ӵĹ����h(hu��n)�������a(ch��n)�ɱ�Ҳ���ߣ������Һλ�y������Ҫ���]�ض��a(b��)�����ҽ��|(zh��)�ijɷ֡�ˮ�֡��ضȡ��ܶȵȲ��_��׃������ֱ��Ӱ표y���Y(ji��)���Ĝ�(zh��n)�_�ԣ�����z�y�·���^��(f��)�s�������Ǚz�yС�������׃����
�ǽ��|ʽ�y�����������������{(di��o)����W(xu��)���������ȡ������c(di��n)�ǜy���ֶβ������ø���֮Ĺ̑B(t��i)������������⡢�侀���ň��ȵ�������Һλ���������ͱ��y���|(zh��)���|�����ܱ��y���|(zh��)Ӱ푣�Ҳ��Ӱ푱��y���|(zh��)�����m�÷����V�����e�ǽ��|ʽ�y���b�ò����m�õ�������ϣ����ճ�ȡ���(qi��ng)���g�ԡ���Ⱦ�ԏ�(qi��ng)���Y(ji��)���Ľ��|(zh��)�����溆�ν�B�������������Ĝy��ԭ����
���������Q���b�Ì�늹����}�_�D(zhu��n)�Q�鳬��������Һ�棬��(j��ng)Һ�淴������ɓQ������ԓ�����D(zhu��n)�Q�����̖�������������ڶ�Һ��Ĝy����
�����ǙC(j��)е��������˥�pС�����淴����̖��(qi��ng)���Ұl(f��)��ͽ����·���Σ������(y��ng)���^��V�����������Ă����ٶ��ܽ��|(zh��)���ܶȡ���ȡ��ضȡ�����������Ӱ푣���y�����������^�͡�
��������ͨ�^�쾀ݗ���ȥ����(j��ng)Һ�淴����쾀���գ�Ȼ���ɶ����·Ӌ(j��)��l(f��)����̖�c������̖�ĕr(sh��)�g��ó�Һλ��
���ٶ��܂������|(zh��)���ضȡ�������Һ�w��늳���(sh��)��Ӱ푺�С����Һ�w����IJ���(d��ng)��Һ�w�������ĭ��Һ�w���|(zh��)�Ľ�늳���(sh��)����������̖��(qi��ng)���кܴ�Ӱ푡���(d��ng)�������^Ҏ(gu��)����(sh��)ֵ�r(sh��)��������Һλ�y�����Ȍ��a(ch��n)���@��Ӱ푡�������(d��o)�ܵ��P�g�������̓Aб����(hu��)Ӱ표y�����ȡ�
���wҺλ�z�y�ǽ�������F(xi��n)��һ�N�¼��g(sh��)������(j��)�⌧(d��o)�w�S�й��ڲ�ͬ���|(zh��)�Ђ�ݔ���Եĸ�׃��Һλ�M(j��n)�Мy����
���wҺλ�y��������(y��u)�c(di��n)�����ȸߡ��`���Ⱥá���늴Ÿɔ_�����g��늽^���Ժá��z�y�F(xi��n)���o늡���·�п��_���Լ������cӋ(j��)��C(j��)�B�ӣ������c���w��ݔϵ�y(t��ng)�M�ɾW(w��ng)�j(lu��)�ȡ�
Ŀǰ���������M(j��n)��Һλ�y���ăx���N��࣬����ͬ�r(sh��)���Мy�����O(ji��n)�ء���(sh��)��(j��)ӛ䛼�̎����Һλ�y���b�ò����ࡣ��ijЩ���I(y��)����ϵ�y(t��ng)�У���(sh��)��(j��)�Ĝy���@һ���������Ѳ��ܝM��F(xi��n)�����I(y��)��Ҫ��������Ҫ��������(sh��)��(j��)�M(j��n)��ӛ䛣������M(j��n)�к���̎����������(sh��)�F(xi��n)���e(cu��)���ơ���ˇ���ơ��YԴ��(y��u)����һϵ�й��������˫@�ô������Ĕ�(sh��)��(j��)���õ��ɿ��ķ����Y�ϣ�������Ҫ�L�ڡ���W(w��ng)�c(di��n)�ıO(ji��n)��ӛ䛡���Һλ�y���@һ�I(l��ng)���У��罭�Ӻ�����������ˮ�ȷ��棬������(sh��)��(j��)�L�r(sh��)�g����W(w��ng)�c(di��n)�IJɼ�ӛ䛷��������ձ�����x��Һλ��׃���������������˂��M(j��n)һ������Ȼ�h(hu��n)�������׃�������Ǟ�(z��i)���A(y��)���ṩ�ɿ���֧�֡�
���O(sh��)Ӌ(j��)��ˮ�乩ˮ��ģ�ͣ��b�چ�Ƭ�C(j��)Һλ�y���b�õĜy����(zh��n)�_���؏�(f��)���ܺá����ĵ͡�ʹ�É����L�����c(di��n)���O(sh��)Ӌ(j��)�Ԇ�Ƭ�C(j��)����A(ch��)��Һλ�y���O(ji��n)��ӛ�ϵ�y(t��ng)�����Ќ�(sh��)�r(sh��)Һλ�y���O(ji��n)��?c��i)?sh��)��(j��)̎���ȹ��ܡ�
���O(sh��)Ӌ(j��)��ˮ�乩ˮ��ģ�ͣ��b�چ�Ƭ�C(j��)Һλ�y���b�õĜy����(zh��n)�_���؏�(f��)���ܺá����ĵ͡�ʹ�É����L�����c(di��n)���O(sh��)Ӌ(j��)�Ԇ�Ƭ�C(j��)����A(ch��)��Һλ�y���O(ji��n)��ӛ�ϵ�y(t��ng)�������Ќ�(sh��)�r(sh��)�y���O(ji��n)��ˮ��Һλ�߶Ȳ��@ʾ�Ĺ��ܣ�������(j��)��(sh��)�r(sh��)ˮ���c�O(sh��)�õ��ϡ���Һλ����(sh��)�ı��^������(d��ng)늙C(j��)��ˮ��ֹͣˮ�á��چ���(d��ng)늙C(j��)�cֹͣˮ�Õr(sh��)����(sh��)�r(sh��)ӛ䛕r(sh��)�g�c(di��n)�c늙C(j��)��B(t��i)��Һλ�y���߶ȡ�5�ף��y������10%��AC220V��늡�
��ͨ�^��λ�C(j��)ܛ�������c�O(ji��n)��ӛ�ϵ�y(t��ng)�M(j��n)��ͨ�ţ��܉��PC�C(j��)�@ȡ��(d��ng)ǰҺλ�߶ȡ�늙C(j��)��B(t��i)���O(sh��)��ϵ�y(t��ng)�r(sh��)�g������Һλ�߶ȵȔ�(sh��)��(j��)�����ɸ���(j��)��Ҫ��׃ϵ�y(t��ng)Ĭ�J(r��n)�ą���(sh��)��ͬ�r(sh��)���ԫ@ȡ�O(sh��)���\(y��n)�Еr(sh��)ӛ䛵Ĕ�(sh��)��(j��)�����܉�?q��)��?sh��)��(j��)���档�܉����(j��)һ�����㷨��Ӌ(j��)�������λ�r(sh��)�gˮ������ˮ�����L�ƈD�Σ�ͨ�^Ӌ(j��)������ĽY(ji��)���������M(j��n)�Ѕ^(q��)����ˮ�y(t��ng)�I��������Դ�����ġ�
����(j��)ϵ�y(t��ng)���O(sh��)Ӌ(j��)Ҫ���Æ�Ƭ�C(j��)������оƬ��ͨ�^��Ƭ�C(j��)��(sh��)��(j��)��ַ������I/O�˿ڣ��U(ku��)չ��(sh��)��(j��)�惦(ch��)ģ�K��A/D�D(zhu��n)�Qģ�K���@ʾģ�K���r(sh��)�gģ�K������ͨ��ģ�K�Լ�A/D�D(zhu��n)�Q��늙C(j��)���Ƶ�����·���Ķ���(sh��)�F(xi��n)ϵ�y(t��ng)������O(sh��)Ӌ(j��)���ܡ�ϵ�y(t��ng)���w������D��D2-1��
�D�У���̖����Hָʾ��ͨ�^��(sh��)��(j��)��ַ������I/O���ϰl(f��)���Ĕ�(sh��)��(j��)��̖��������������̖��
��Ƭ�C(j��)��������ģ�K��ʹ���ڌ���Ƭ�C(j��)�x���������^��Ŀ��g����Ƭ�C(j��)��30����İl(f��)չ�v���У��γ��˶˾����ϵ�С�����̖���ټҠ��Q���ľ��档������x��һ��(g��)���m�Ć�Ƭ�C(j��)�Еr(sh��)��IJ�̫���ף�Ҫ���]�ķ���̫�ࡣ���¿��Y(ji��)�������c(di��n)��
2) ��Ƭ�C(j��)������(qi��ng)���ܡ����翴�T�����pָᘡ��p���ڡ�RTC����(sh��)�r(sh��)�r(sh��)犣���EEPROM���U(ku��)չRAM��CAN�ӿڡ�I2C�ӿڡ�SPI�ӿڡ�USB�ӿڡ�
7) ����늉������������O(sh��)Ӌ(j��)�ҕ�C(j��)�b������2��(ji��)��늳ع��,���ّ�(y��ng)ԓ����1.8~3.6V늉�������(n��i)������
����(j��)�������أ�ϵ�y(t��ng)�Č�(sh��)�r(sh��)��Ҫ�ߣ�����\(y��n)���ٶȟo��ܿ죬��ϵ�y(t��ng)Ҏ(gu��)ģ�����÷֕r(sh��)��(f��)�õķ�ʽʹ�ÿ�������I/O�ڵĔ�(sh��)������Ҫ���M(j��n)һ�����͡�ʹ��4·8λI/O�ӿڼ��ɝM���O(sh��)Ӌ(j��)Ҫ��ϵ�y(t��ng)����Ҫ�U(ku��)չ�ⲿ�惦(ch��)������(sh��)��(j��)�M(j��n)�д惦(ch��)����(sh��)��(j��)�惦(ch��)����32KB�ѝM��Ҫ����˲���16λ���(zh��n)16λ��ַ�����Ć�Ƭ�C(j��)���ɝM���O(sh��)Ӌ(j��)��Ҫ�������nj�(sh��)�(y��n)�A�Σ�����DIP���p��ֱ�壩���b��оƬ���ڌ�(sh��)�(y��n)���������]��(sh��)�H���I(y��)�����еČ����h(hu��n)���ľ��wҪ��ϵ�y(t��ng)����AC220V��늣��Ҍ����ě]�о��wҪ��ʹ��DC5V��оƬ��늣�����ϵ�y(t��ng)����·���O(sh��)Ӌ(j��)��оƬ֧��ISP�ɹ�(ji��)ʡ��������Ͷ�롣
AT89S52��һ�N���ġ�������CMOS��ˇ��8λ������������8K�ھ�ϵ�y(t��ng)�ɾ���Flash�惦(ch��)����ʹ��Atmel��˾���ܶȷ���ʧ�Դ惦(ch��)�����g(sh��)���죬�c���I(y��)80C51�a(ch��n)Ʒָ������_��ȫ���ݡ�Ƭ��Flash���S����惦(ch��)����ϵ�y(t��ng)�ɾ��̣����m�ڳ�Ҏ(gu��)��������ʹ��AT89S52�鱊��Ƕ��ʽ���Ƒ�(y��ng)��ϵ�y(t��ng)�ṩ���`�����Ч�Ľ�Q������
AT89S52��������(bi��o)��(zh��n)���ܣ�8k�ֹ�(ji��)Flash��256�ֹ�(ji��)RAM��32λI/O�ھ������T�����r(sh��)����2��(g��)��(sh��)��(j��)ָᘣ�����(g��)16λ���r(sh��)��/Ӌ(j��)��(sh��)����һ��(g��)6����2���Д�Y(ji��)��(g��u)��ȫ�p�����пڣ�Ƭ��(n��i)���r(sh��)��·�����⣬AT89S52�ɽ���0Hz�o�B(t��i)߉������֧��2�Nܛ�����x��(ji��)�ģʽ�����eģʽ�£�CPUֹͣ���������SRAM�����r(sh��)��/Ӌ(j��)��(sh��)�������ڡ��Д��^�m(x��)��������늱��o(h��)��ʽ�£�RAM��(n��i)�ݱ����棬��ʎ�������Y(ji��)����Ƭ�C(j��)һ�й���ֹͣ��ֱ����һ��(g��)�Д��Ӳ����(f��)λ��ֹ��
�I�P�چ�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)����һ��(g��)���P(gu��n)�I�IJ��������܌�(sh��)�F(xi��n)���Ƭ�C(j��)ݔ�딵(sh��)��(j��)���l(f��)������ȹ��ܣ����˹����A(y��)��Ƭ�C(j��)ϵ�y(t��ng)����Ҫ�ֶΡ����]�����O(sh��)Ӌ(j��)��(sh��)�H��Ҫ�İ��I�^�٣��ʲ��ê�(d��)��ʽ�I�P�ӿ��·���ɡ�
�@ʾ����Ӌ(j��)��C(j��)����Ҫݔ���O(sh��)�䣬�ں��εĹ��I(y��)����ϵ�y(t��ng)�У����õ��@ʾ���Д�(sh��)�a���@ʾ����LED����Һ���@ʾ����LCD���ȣ�ԓϵ�y(t��ng)�H���@ʾҺλ�߶ȣ�����(sh��)����������LED�@ʾ�����ܝM��ϵ�y(t��ng)Ҫ��
ϵ�y(t��ng)�У�Ҫ��y��������5m���y�����Ȟ�10%�����O(sh��)�y��������5m����10%���ȵ�Ҫ���£���y������Чֵ��5*10%=0.5m���������2λLED�@ʾ�����ܝM���O(sh��)Ӌ(j��)Ҫ��
�چ�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�У�LED�@ʾ���ĬF(xi��n)��(sh��)�����ЃɷN���o�B(t��i)�@ʾ���̈́�(d��ng)�B(t��i)�@ʾ�����o�B(t��i)�@ʾ���ă�(y��u)�c(di��n)���@ʾ����ʮ�ֺ��Σ��@ʾ���ȴ�����CPU���ؽ�(j��ng)�������@ʾ�������Թ�(ji��)�s��CPU�Ĺ����r(sh��)�g�����o�B(t��i)�@ʾҲ����ȱ�c(di��n)����Ҫ��ռ��I/O���YԴ�^�࣬Ӳ���ɱ��^�ߡ������o�B(t��i)�@ʾ���������@ʾ����(sh��)Ŀ�^�ٵđ�(y��ng)��ϵ�y(t��ng)�С����˽�Q�o�B(t��i)�@ʾռ��I/O���YԴ��ȱ�c(di��n)����ܛ���ϲ��É��sBCD�aݔ���@ʾ��(sh��)��(j��)��Ӳ����ʹ��һ��(g��)8λ�i����74LS273�c�ɂ�(g��)BCD��(sh��)�a�@ʾ�g�a�(q��)��(d��ng)оƬ74LS47�B�ӣ��p�ٌ�ϵ�y(t��ng)�YԴ��ռ�Õr(sh��)�g������74LS47�g�a�鹲ꖘO��(sh��)�a�ܵĴa��������x��8�Σ���С��(sh��)�c(di��n)����ꖘOLED���ڔ�(sh��)��(j��)�@ʾ����λ�@ʾ�׆�λ����λ�@ʾ���׆�λ���Ҹ�λС��(sh��)�c(di��n)��������Ƭ�C(j��)ʹ��1λI/O�ڿ��Ɣ�(sh��)��(j��)���i�档
ʹ��AT89S52��(n��i)��256�ֹ�(ji��)�Ĕ�(sh��)��(j��)�惦(ch��)��ӛ䛔�(sh��)��(j��)���h(yu��n)�h(yu��n)����ģ������Ҫ�U(ku��)չ��(sh��)��(j��)�惦(ch��)���M(j��n)�Д�(sh��)��(j��)�惦(ch��)��
��(sh��)��(j��)�惦(ch��)�����x��ķN��࣬���õ����S�C(j��)��ȡ�惦(ch��)����RAM����ֻ�x�惦(ch��)����ROM���c�W�棨FLASH����
RAM�Ǵ惦(ch��)��Ԫ�ă�(n��i)�ݿɰ����S��ȡ������룬�Ҵ�ȡ���ٶ��c�惦(ch��)��Ԫ��λ�ßo�P(gu��n)�Ĵ惦(ch��)�����@�N�惦(ch��)���ڔ�늕r(sh��)���Gʧ��惦(ch��)��(n��i)�ݣ�����Ҫ���ڴ惦(ch��)�̕r(sh��)�gʹ�õij���
ROMͨ��ָ�̻��惦(ch��)����һ�Ό��룬����(f��)�xȡ�����������c(di��n)�cRAM�෴��ROM�ַ�һ���Թ̻����������늲����،��ɷN��͡�
�W��t��һ�N���]�l(f��)�ԣ�Non-Volatile����(n��i)�棬�ڛ]���������(y��ng)�ėl����Ҳ�܉��L�õر���?j��n)?sh��)��(j��)����惦(ch��)�����ஔ(d��ng)��Ӳ�P���@�(xi��ng)���������W����Գɞ���y�͔�(sh��)���O(sh��)��Ĵ惦(ch��)���|(zh��)�Ļ��A(ch��)��
NAND�W��Ĵ惦(ch��)��Ԫ?ji��ng)t���ô��нY(ji��)��(g��u)���惦(ch��)��Ԫ���x������퓺͉K���λ���M(j��n)�У�һ퓰��������ֹ�(ji��)������퓄t�M�Ƀ�(ch��)��K��NAND�Ĵ惦(ch��)�K��С��8��32KB�����@�N�Y(ji��)��(g��u)���ă�(y��u)�c(di��n)���������������úܴ��^512MB������NAND�a(ch��n)Ʒ�ஔ(d��ng)�ձ飬 NAND�W��ijɱ��^�ͣ������ڴ�Ҏ(gu��)ģ�ռ���
NAND�W���ȱ�c(di��n)�����x�ٶ��^��������I/O�˿�ֻ��8��(g��)����NORҪ�ٶ��ˡ��@�^(q��)�^(q��)8��(g��)I/O�˿�ֻ������̖݆�����͵ķ�ʽ��ɔ�(sh��)��(j��)�Ă��ͣ��ٶ�Ҫ��NOR�W��IJ��Ђ�ݔģʽ���öࡣ�ټ���NAND�W���߉����ӱPģ�K�Y(ji��)��(g��u)����(n��i)�������ڌ��T�Ĵ惦(ch��)��������һ�����F(xi��n)��(sh��)��(j��)�ĉK���o���ޣ��ɿ����^NOR�W��Ҫ�
NOR�����c(di��n)��оƬ��(n��i)��(zh��)��(XIP, eXecute In Place)���@�ӑ�(y��ng)�ó������ֱ����flash�W���(n��i)�\(y��n)�У������ٰѴ��a�x��ϵ�y(t��ng)RAM�С�NOR�Ă�ݔЧ�ʺܸߣ���1��4MB��С�����r(sh��)���кܸߵijɱ�Ч�棬���Ǻܵ͵Č���Ͳ����ٶȴ��Ӱ����������ܡ�
NAND�Y(ji��)��(g��u)���ṩ�O�ߵĆ�Ԫ�ܶȣ������_(d��)���ߴ惦(ch��)�ܶȣ����Ҍ���Ͳ������ٶ�Ҳ�ܿ졣��(y��ng)��NAND�����y����FLASH�Ĺ�������Ҫ����ġ�
���Կ���ROM�Ĵ惦(ch��)��(f��)�s�����m�ˌ�(sh��)�r(sh��)ϵ�y(t��ng)�Ĕ�(sh��)��(j��)�惦(ch��)��
FLASH��һ��(g��)���e(cu��)�Ľ�Q�������b��ϵ�y(t��ng)�ď�(f��)�s�̶ȣ����r(sh��)�����]ʹ��FLASH����惦(ch��)��Ԫ��
����(j��)�O(sh��)Ӌ(j��)Ҫ��ӛ�ijһӛ��c(di��n)��늙C(j��)��B(t��i)��׃�r(sh��)�̣��Ġ�B(t��i)�c�r(sh��)�g��Ҫ6�ֹ�(ji��)��(sh��)��(j��)�����꣨2000-2099�꣩���£�1-12�£����գ�1-31�գ����r(sh��)��0-23�r(sh��)�����֣�0-59�֣�����B(t��i)��0��1���@Щ��(sh��)��(j��)�����ϵ�y(t��ng)�L�r(sh��)�g�Ĺ���������(hu��)�д������Ĕ�(sh��)��(j��)�a(ch��n)����������(sh��)��(j��)�惦(ch��)���g�������(hu��)�a(ch��n)����(sh��)��(j��)�ĸ��w���Ķ������ˌ���(sh��)��(j��)�����Ĝ�(zh��n)�_�ԡ�����x��32K�ֹ�(ji��)�Ĕ�(sh��)��(j��)�惦(ch��)��������ӛ䛴���5000�(xi��ng)ӛ��c(di��n)��(sh��)��(j��)�����]��ˮ����ˮ�c��ˮ���l���̶Ȳ��ߣ�5000�(xi��ng)��(sh��)��(j��)�ѻ����M����ڔ�(sh��)��(j��)̎���������ڌ�(sh��)�H��(y��ng)���У�ϵ�y(t��ng)�O(sh��)Ӌ(j��)�ڲ���늵Ĺ����h(hu��n)���£�ܛ���ϣ���λ�C(j��)ܛ������(sh��)��(j��)��ȡ�ɱ�����PC�C(j��)�У�5000�(xi��ng)��(sh��)��(j��)�M(j��n)�Еr(sh��)�g�ϵľ��_�dz���ġ��鹝(ji��)ʡCPU�Ĺ����r(sh��)�g��������RAM�惦(ch��)�ٶȿ졢ʹ�÷�������c(di��n)���Ķ����Ժ�����RAM��는�(sh��)��(j��)�Gʧ��ȱ�c(di��n)��
ͨ�^��Ƭ�C(j��)�Ķ��r(sh��)���������O(sh��)Ӌ(j��)�r(sh��)�g���ܣ�Ȼ����Ƭ�C(j��)�����Įa(ch��n)���r(sh��)�g��(sh��)��(j��)���ռ����ϵ�y(t��ng)���YԴ�������˹���Ч�ʣ�����Ӱ����������ܵČ�(sh��)�F(xi��n)������ڱ��O(sh��)Ӌ(j��)�����У��������ⲿоƬ�ṩ�r(sh��)�g��̖������ϵ�y(t��ng)ӛ䛕r(sh��)�g��Ϣ��
DS1302��DALLAS��˾�Ƴ��������늕r(sh��)�оƬ����(n��i)����һ��(g��)��(sh��)�r(sh��)�r(sh��)�/�՚v��31�ֹ�(ji��)�o�B(t��i)RAM��ͨ�^���εĴ��нӿ��c��Ƭ�C(j��)�M(j��n)��ͨ�š���(sh��)�r(sh��)�r(sh��)�/�՚v�·�ṩ�롢�֡��r(sh��)�����ڡ��ա��¡������Ϣ��ÿ�µ��씵(sh��)���c����씵(sh��)���Ԅ�(d��ng)�{(di��o)�����r(sh��)犲�����ͨ�^AM/PMָʾ�Q������24��12С�r(sh��)��ʽ��DS1302�c��Ƭ�C(j��)֮�g�ܺ��εز���ͬ�����еķ�ʽ�M(j��n)��ͨ�ţ��H���õ�����(g��)�ھ�(1) RES����(f��)λ����(2) I/O����(sh��)��(j��)������(3) SCLK�����Еr(sh��)犣����r(sh��)�/RAM���x������(sh��)��(j��)��һ��(g��)�ֹ�(ji��)����_(d��)31��(g��)�ֹ�(ji��)���ַ��M��ʽͨ�š�DS1302�����r(sh��)���ĺܵͣ�����?j��n)?sh��)��(j��)�͕r(sh��)���Ϣ�r(sh��)����С��1mW��
DS1302����DS1202���M(j��n)���������������µ������p�Դ���_�������Դ�͂���Դ����(y��ng)��Vcc1��ɾ����������Դ�������߂�(g��)�ֹ�(ji��)�惦(ch��)�������V����(y��ng)�����Ԓ�����桢��yʽ�x���Լ�늳ع�늵ăx���x���Ȯa(ch��n)Ʒ�I(l��ng)�����挢��Ҫ������ָ��(bi��o)��һ�C�ϣ�
A/D������оƬ�nj�(sh��)�F(xi��n)��Ƭ�C(j��)��(sh��)��(j��)�ɼ��ij������������A/D�D(zhu��n)�Q����Ʒ�N���ࡢ���ܸ��������O(sh��)Ӌ(j��)��(sh��)��(j��)�ɼ�ϵ�y(t��ng)�r(sh��)�����������ľ�������x����m��A/D�D(zhu��n)�Q���ԝM��ϵ�y(t��ng)�O(sh��)Ӌ(j��)Ҫ��Ć��}���x��A/D�D(zhu��n)�Q������Ҫ���]����������Ʒ�|(zh��)�͑�(y��ng)�õĈ���Ҫ�����ϣ����Ը���(j��)���ׂ�(g��)�����ָ��(bi��o)�x��һ��(g��)A/D������
A/D�D(zhu��n)�Q��λ��(sh��)�Ĵ_������(y��ng)ԓ�Ĕ�(sh��)��(j��)�ɼ�ϵ�y(t��ng)���o�B(t��i)���Ⱥ̈́�(d��ng)�B(t��i)ƽ�����@�ɂ�(g��)�����M(j��n)�п��]�����o�B(t��i)���ȷ�����f��Ҫ���]ݔ����̖��ԭʼ�`����f��ݔ�����a(ch��n)�����`�����ģ�M��̖��(sh��)�ֻ��r(sh��)�a(ch��n)���`�����Ҫ���֡������`���cA/D�D(zhu��n)�Q��λ��(sh��)���P(gu��n)��һ���8λ���µ�A/D�D(zhu��n)�Q���w��ͷֱ���A/D�D(zhu��n)�Q����9~12λ�ķQ���зֱ����D(zhu��n)�Q����13λ���ϵķQ��߷ֱ����D(zhu��n)�Q����10λ���µ�A/DоƬ�`���^��11λ���ό��pС�`��o̫��ؕ�I(xi��n)������A/D�D(zhu��n)�Q����Ҫ��s����^�ߡ���ˣ�ȡ10λ��11λ�Ǻ��m�ġ�����ģ�M��̖�Ƚ�(j��ng)�^�y���b�ã��ٽ�(j��ng)A/D�D(zhu��n)�Q���D(zhu��n)�Q����M(j��n)��̎������ˣ������`�����ɜy���`��������`�ͬ��(g��u)�ɵġ�A/D�D(zhu��n)�Q���ľ��ȑ�(y��ng)�c�y���b�õľ�����ƥ�䡣Ҳ�����f��һ����Ҫ�������`���ڿ��`������ռ�ı���ҪС��ʹ�����@����?c��i)U(ku��)��y���`���һ�����횸���(j��)Ŀǰ�y���b�õľ���ˮƽ����A/D�D(zhu��n)�Q����λ��(sh��)���ǡ��(d��ng)?sh��)�Ҫ��?/div>
Ŀǰ�������(sh��)�y���b�õľ���ֵ��С��0.1%~0.5%����A/D�D(zhu��n)�Q���ľ���ȡ0.05% ~ 0.1%���ɣ�����(y��ng)�Ķ��M(j��n)�ƴa��10~11λ�����Ϸ�̖λ������11~12λ����(d��ng)������đ�(y��ng)�Õr(sh��)��A/D�D(zhu��n)�Q��Ҫ������λ��(sh��)���@�r(sh��)�����ɲ����p���ȵ��D(zhu��n)�Q������
2) A/D�D(zhu��n)�Q�����D(zhu��n)�Q����
A/D�D(zhu��n)�Q���Ć���(d��ng)�D(zhu��n)�Q���D(zhu��n)�Q�Y(ji��)����ݔ����(w��n)���Ĕ�(sh��)��������Ҫһ�����D(zhu��n)�Q�r(sh��)�g���D(zhu��n)�Q�r(sh��)�g�ĵ���(sh��)����ÿ�������ɵ��D(zhu��n)�Q�Δ�(sh��)���Q���D(zhu��n)�Q���ʡ�
�_��A/D�D(zhu��n)�Q�����D(zhu��n)�Q���ʕr(sh��)����(y��ng)���]ϵ�y(t��ng)�IJɘ����ʡ����磬������D(zhu��n)�Q�r(sh��)�g��100us��A/D�D(zhu��n)�Q�����t���D(zhu��n)�Q���ʞ�10KHz������(j��)�ɘӶ����͌�(sh��)�H��Ҫ��һ��(g��)���ڵIJ������10��(g��)���c(di��n)����ô�@�ӵ�A/D�D(zhu��n)�Q�����Ҳֻ��̎���l�ʞ�1KHz��ģ�M��̖�����D(zhu��n)�Q�r(sh��)�g�pС����̖�l�ʿ���ߡ���һ��Ć�Ƭ�C(j��)���ԣ�Ҫ�ڲɘӕr(sh��)�g��(n��i)���A/D�D(zhu��n)�Q����Ĺ��������x��(sh��)��(j��)���ن���(d��ng)���攵(sh��)��(j��)��ѭ�h(hu��n)Ӌ(j��)��(sh��)���ѽ�(j��ng)���^���y�ˡ�
3) �ɘ�/������
�ɼ�ֱ����׃���dz�������ģ�M��̖�r(sh��)�ɲ��òɘӱ���������������ģ�M��̖һ�㶼Ҫ�Ӳɘӱ������������̖�l�ʲ��ߣ�A/D�D(zhu��n)�Q�����D(zhu��n)�Q�r(sh��)�g�̣����ɘӸ���A/D�r(sh��)��Ҳ�ɲ��òɘ�/��������
4) A/D�D(zhu��n)�Q������
A/D�D(zhu��n)�Q�r(sh��)��Ҫ�����p�O�Եģ��Еr(sh��)�džΘO�Եġ�ݔ����̖��Сֵ�еď����_ʼ��Ҳ�Џķ����_ʼ�ġ��е��D(zhu��n)�Q���ṩ�˲�ͬ���̵����_��ֻ�����_ʹ�ã����ܱ��C�D(zhu��n)�Q���ȡ���ʹ���У�Ӱ�A/D�D(zhu��n)�Q�����̵������У�����׃�Q���p�O��ƫ�ã��p����(zh��n)늉���A/D�D(zhu��n)�Q����(n��i)�����^��ݔ��˵����_ʹ�á�
5) �M�̶��`��
�M��ݔ���r(sh��)����(y��ng)��ݔ����̖�c����ݔ����ֵ̖֮�
6) ���Զ�
��(sh��)�H�D(zhu��n)�Q�����D(zhu��n)�ƺ���(sh��)�c����ֱ�������ƫ�ơ�
ADC0804�dž�·8λ��α��^���p�O��ݔ��A/D�D(zhu��n)�Q�����D(zhu��n)�Q�r(sh��)�gС��

�������g����
��2-1��
�^�������`�
��2-2��
���������`�
��2-3��
��Һλ�������`���c����늉��`������r�£�ADC0804����ȫ�M���O(sh��)Ӌ(j��)�`��Ҫ��ġ�
2.3.7 ͨ��ģ�K�O(sh��)Ӌ(j��)����
AT89S52��Ƭ�C(j��)��(n��i)����һ��(g��)ȫ�p����������I/O�ӿڣ�ռ��P3.0��P3.1�ɂ�(g��)���_������ԓ�ӿڣ��Ɍ�(sh��)�F(xi��n)ϵ�y(t��ng)�c��λ�C(j��)��ͨ�š�
��ͬ�O(sh��)���g����ͨ�ŵ��^���У���Ҫ������ͬ�ĵĽӿژ�(bi��o)��(zh��n)����ͨ�š�
���͵Ĵ���ͨӍ��(bi��o)��(zh��n)��RS232��RS485���������x��늉����迹�ȣ�������ܛ���f(xi��)�h�o�趨�x��
RS-232C��(bi��o)��(zh��n)���f(xi��)�h����ȫ�Q��EIA-RS-232C��(bi��o)��(zh��n)������EIA��Electronic Industry Association������������ӹ��I(y��)�f(xi��)��(hu��)��RS��EcommededStandard���������]��(bi��o)��(zh��n)��232�ǘ�(bi��o)�R̖��C����RS232������һ���ģ�1969�������@֮ǰ����RS232B��RS232A������Ҏ(gu��)���B����|�͙C(j��)е��늚����ԡ���̖���ܼ������^�̡�
�^(q��)�e��RS232��RS485����������
1) RS-485��늚����ԣ�߉��1���ԃɾ��g��늉���飫��2~6��V��ʾ��߉��0���ԃɾ��g��늉���飭��2~6��V��ʾ���ӿ���̖�ƽ��RS-232-C�����ˣ��Ͳ��דp�Ľӿ��·��оƬ����ԓ�ƽ�cTTL�ƽ���ݣ��ɷ����cTTL�·�B�ӡ�
2) RS-485�Ĕ�(sh��)��(j��)��߂�ݔ���ʞ�10Mbps��
3) RS-485�ӿ��Dz���ƽ���(q��)��(d��ng)���Ͳ�ֽ������ĽM�ϣ�����ģ�ɔ_��������(qi��ng)���������ɔ_�Ժá�
4) RS-485�ӿڵ�����ݔ���x��(bi��o)��(zh��n)ֵ��4000Ӣ�ߣ���(sh��)�H�Ͽ��_(d��)3000�ף�����RS-232-C�ӿ��ڿ�����ֻ���S�B��1��(g��)�հl(f��)��������վ��������RS-485�ӿ��ڿ����������S�B�Ӷ��_(d��)128��(g��)�հl(f��)���������ж�վ�������@���Ñ��������Æ�һ��RS-485�ӿڷ���ؽ������O(sh��)��W(w��ng)�j(lu��)��
��RS-485�ӿھ������õĿ����ɔ_�ԣ��L�Ă�ݔ���x�Ͷ�վ������������(y��u)�c(di��n)��ʹ��ɞ����x�Ĵ��нӿڡ�
PC�C(j��)������λ�C(j��)��һ����r����RS-232Cͨ�Žӿڣ��b��RS-485�ӿڵă�(y��u)�c(di��n)�cϵ�y(t��ng)��(sh��)�H�����h(hu��n)������Ҫ��ϵ�y(t��ng)����RS-485�ӿژ�(bi��o)��(zh��n)��ʹ��RS-232/RS-485�D(zhu��n)�Q���cPC�C(j��)�B���M(j��n)��ͨ�š�
MAX485�ӿ�оƬ��Maxim��˾��һ�NRS-485оƬ�����Æ�һ�Դ��5V�������~�������300��A�����ð��p��ͨӍ��ʽ������Ɍ�TTL�ƽ�D(zhu��n)�Q��RS-485�ƽ�Ĺ��ܡ�
2.3.8 늙C(j��)����ģ�K�O(sh��)Ӌ(j��)����
�����O(sh��)Ӌ(j��)�Л]��Ҏ(gu��)��ˮ��늙C(j��)�ą���(sh��)Ҏ(gu��)���Ҳ�ͬ��̖��ˮ�Å���(sh��)���M��ͬ��늚Ⅲ��(sh��)�IJ�ͬʹ�����·�ϵ��O(sh��)Ӌ(j��)��^������ڴ˃H����Փ��ʾ��
�x���^�������늙C(j��)���Ƶ�Ԫ����
�^�����һ�N��ӿ��������������п���ϵ�y(t��ng)���ַQݔ���·���ͱ�����ϵ�y(t��ng)���ַQݔ����·����ͨ����(y��ng)�����Ԅ�(d��ng)�����·�У�����(sh��)�H�������^С�����ȥ�����^�������һ�N���Ԅ�(d��ng)�_�P(gu��n)���������·�������Ԅ�(d��ng)�{(di��o)��(ji��)����ȫ���o(h��)���D(zhu��n)�Q�·�����á�
�^�����Ҫ�a(ch��n)Ʒ���g(sh��)����(sh��)��
1) �~������늉�����ָ�^������������r(sh��)��Ȧ����Ҫ��늉�������(j��)�^�������̖��ͬ�������ǽ���늉���Ҳ������ֱ��늉���
2) ֱ����衣��ָ�^����о�Ȧ��ֱ����裬����ͨ�^�f�ܱ�y����
3) �����������ָ�^����܉�a(ch��n)�����τ�(d��ng)������С�����������ʹ�Õr(sh��)���o�����������Դ�������������@���^������ܷ�(w��n)���ع����������ھ�Ȧ���ӵĹ���늉���һ�㲻Ҫ���^�~������늉���1.5������t��(hu��)�a(ch��n)���^���������Ѿ�Ȧ������
4) ጷ��������ָ�^����a(ch��n)��ጷń�(d��ng)��������������(d��ng)�^������Ϡ�B(t��i)������pС��һ���̶ȕr(sh��)���^����͕�(hu��)�֏�(f��)��δͨ늵�ጷŠ�B(t��i)���@�r(sh��)������h(yu��n)�h(yu��n)С�����������
5) �|�c(di��n)�ГQ늉����������ָ�^������S���d��늉�����������Q�����^����ܿ���늉�������Ĵ�С��ʹ�Õr(sh��)���ܳ��^��ֵ����t�����דp���^������|�c(di��n)��
����(j��)���ϵą���(sh��)���Y(ji��)���O(sh��)Ӌ(j��)����ʾ�ԣ��x���~������늉�120VAC/24VDC���������3A������늉�5VDC��С���^�����
��3�� Ӳ���·�O(sh��)Ӌ(j��)
3.1 AT89S52Ӳ���O(sh��)Ӌ(j��)
AT89S52���_���x�����ܽ�B��D3-1��
P0����P0����һ��(g��)8λ©�O�_·���p��I/O�ڡ�����ݔ���ڣ�ÿλ���(q��)��(d��ng)8��(g��)TTL߉�ƽ����P0�˿ڌ���1���r(sh��)�����_�������迹ݔ�롣��(d��ng)�L���ⲿ����͔�(sh��)��(j��)�惦(ch��)���r(sh��)��P0��Ҳ�������8λ��ַ/��(sh��)��(j��)��(f��)�á����@�Nģʽ�£�P0���Ѓ�(n��i)��������衣��FLASH���̕r(sh��)��P0��Ҳ�Á�����ָ���ֹ�(ji��)���ڳ���У�(y��n)�r(sh��)��ݔ��ָ���ֹ�(ji��)������У�(y��n)�r(sh��)����Ҫ�ⲿ������衣
P1����P1����һ��(g��)���Ѓ�(n��i)����������8λ�p��I/O�ڣ�P1ݔ�����_�����(q��)��(d��ng)4��(g��)TTL߉�ƽ����P1�˿ڌ���1���r(sh��)����(n��i)���������Ѷ˿����ߣ��˕r(sh��)��������ݔ���ʹ�á�����ݔ��ʹ�Õr(sh��)�����ⲿ���͵����_���ڃ�(n��i)������ԭ��ݔ�������IIL�������⣬P1.0��P1.2�քe�����r(sh��)��/Ӌ(j��)��(sh��)��2���ⲿӋ(j��)��(sh��)ݔ�루P1.0/T2���Ͷ��r(sh��)��/Ӌ(j��)��(sh��)��2���|�l(f��)ݔ�루P1.1/T2EX�������w������ʾ��
- ��FLASH���̺�У�(y��n)�r(sh��)��P1�ڽ��յ�8λ��ַ�ֹ�(ji��)��
- ���_̖�ڶ����ܣ�
P1.0/T2 �����r(sh��)��/Ӌ(j��)��(sh��)��T2���ⲿӋ(j��)��(sh��)ݔ�룩���r(sh��)�ݔ��
P1.1/T2EX �����r(sh��)��/Ӌ(j��)��(sh��)��T2�IJ�/���d�|�l(f��)��̖�ͷ�����ƣ�
P1.5 MOSI ����ϵ�y(t��ng)�����ã�
P1.6 MISO ����ϵ�y(t��ng)�����ã�
P1.7 SCK ����ϵ�y(t��ng)�����ã�
P2����P2����һ��(g��)���Ѓ�(n��i)����������8λ�p��I/O�ڣ�P2ݔ�����_�����(q��)��(d��ng)4��(g��)TTL߉�ƽ����P2�˿ڌ���1���r(sh��)����(n��i)���������Ѷ˿����ߣ��˕r(sh��)��������ݔ���ʹ�á�����ݔ��ʹ�Õr(sh��)�����ⲿ���͵����_���ڃ�(n��i)������ԭ��ݔ�������IIL�������L���ⲿ����惦(ch��)������16λ��ַ�xȡ�ⲿ��(sh��)��(j��)�惦(ch��)���������(zh��)��MOVX @DPTR���r(sh��)��P2���ͳ��߰�λ��ַ�����@�N��(y��ng)���У�P2��ʹ�ú�(qi��ng)�ă�(n��i)�������l(f��)��1����ʹ��8λ��ַ����MOVX @RI���L���ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)��P2��ݔ��P2�i�����ă�(n��i)�ݡ���FLASH���̺�У�(y��n)�r(sh��)��P2��Ҳ���ո�8λ��ַ�ֹ�(ji��)��һЩ������̖��
P3����P3����һ��(g��)���Ѓ�(n��i)����������8λ�p��I/O�ڣ�P3ݔ�����_�����(q��)��(d��ng)4��(g��)TTL߉�ƽ����P3�˿ڌ���1���r(sh��)����(n��i)���������Ѷ˿����ߣ��˕r(sh��)��������ݔ���ʹ�á�����ݔ��ʹ�Õr(sh��)�����ⲿ���͵����_���ڃ�(n��i)������ԭ��ݔ�������IIL����P3��������AT89S52����ܣ��ڶ����ܣ�ʹ�ã����±���ʾ��
��3-1 �˿����_�ڶ�����
| |
| |
| |
| |
| |
| TO(���r(sh��)/Ӌ(j��)��(sh��)��0) |
| T1(���r(sh��)/Ӌ(j��)��(sh��)��1) |
| WR(�ⲿ��(sh��)��(j��)�惦(ch��)�����xͨ) |
| RD(�ⲿ��(sh��)��(j��)�惦(ch��)���x�xͨ) |
���⣬P3��߀����һЩ����FLASH�W�澎�̺ͳ���У�(y��n)�Ŀ�����̖��
RST������(f��)λݔ�롣��(d��ng)��ʎ�������r(sh��)��RST���_���F(xi��n)�ɂ�(g��)�C(j��)���������ϸ��ƽ��ʹ��Ƭ�C(j��)��(f��)λ��
ALE/PROG������(d��ng)�L���ⲿ����惦(ch��)����(sh��)��(j��)�惦(ch��)���r(sh��)��ALE����ַ�i�����S��ݔ���}�_�����i���ַ�ĵ�8λ�ֹ�(ji��)��һ����r�£�ALE���ԕr(sh��)���ʎ�l�ʵ�1/6ݔ���̶����}�_��̖��������Ɍ���ݔ���r(sh��)犻����ڶ��r(sh��)Ŀ�ġ�Ҫע����ǣ�ÿ��(d��ng)�L���ⲿ��(sh��)��(j��)�惦(ch��)���r(sh��)�����^һ��(g��)ALE�}�_����FLASH�惦(ch��)���������g��ԓ���_߀����ݔ�뾎���}�_��PROG�������б�Ҫ����ͨ�^������ܼĴ�����SFR���^(q��)�е�8EH��Ԫ��D0λ��λ���ɽ�ֹALE������ԓλ��λ��ֻ��һ�lMOVX��MOVCָ����܌�ALE������⣬ԓ���_��(hu��)�������ߣ���Ƭ�C(j��)��(zh��)���ⲿ����r(sh��)����(y��ng)�O(sh��)��ALE��ֹλ�oЧ��
PSEN��������(ch��)�����S��PSEN��ݔ�����ⲿ����惦(ch��)�����x�xͨ��̖����(d��ng)AT89S52���ⲿ����惦(ch��)��ȡָ���(sh��)��(j��)���r(sh��)��ÿ��(g��)�C(j��)�����ڃɴ�PSEN��Ч����ݔ���ɂ�(g��)�}�_���ڴ����g����(d��ng)�L���ⲿ��(sh��)��(j��)�惦(ch��)���������^�ɴ�PSEN��̖��
EA/VPP�����ⲿ�L�����S����ʹCPU�H�L���ⲿ����惦(ch��)������ַ��0000H~FFFFH����EA�˱�횱��ֵ��ƽ���ӵأ�����ע����ǣ��������λLB1�����̣���(f��)λ�r(sh��)��(n��i)����(hu��)�i��EA�ˠ�B(t��i)����EA�˞���ƽ����Vcc�ˣ���CPU�t��(zh��)�Ѓ�(n��i)������惦(ch��)����ָ�FLASH�惦(ch��)�����̕r(sh��)��ԓ���_���ϣ�12V�ľ������S�ԴVpp����(d��ng)Ȼ�@�����ԓ������ʹ��12V����늉�Vpp��
XTAL1����ʎ������Ŵ����̓�(n��i)���r(sh��)犰l(f��)���·��ݔ��ˡ�
XTAL2����ʎ������Ŵ�����ݔ���ˡ�
���˱��ڽ������f������Ƭ�C(j��)�����_�W(w��ng)�j(lu��)��(bi��o)̖���x��D3-1��
Ҫʹ��Ƭ�C(j��)�����O(sh��)Ӌ(j��)Ҫ������������������Ƭ�C(j��)������Ĺ���Ҫ���]��ϵ�y(t��ng)�o�辫�_�ض��r(sh��)���ܣ��Ҟ��˷��㴮��ͨ�Ų����ʵ�Ӌ(j��)�㣬����11.0592MHz�ľ����ṩϵ�y(t��ng)�r(sh��)犡������ӏ�(f��)λ�·���M�Ɇ�Ƭ�C(j��)��Сϵ�y(t��ng)������(j��)�·�O(sh��)Ӌ(j��)Ҏ(gu��)����AT89S52оƬ�փԣ��O(sh��)Ӌ(j��)�r(sh��)��·�c��(f��)λ�·��D3-2��
�D3-2 ��(f��)λ�·���r(sh��)��·
�D�оW(w��ng)�j(lu��)��(bi��o)̖RST�B�ӆ�Ƭ�C(j��)RST���_��������늏�(f��)λ�c�ք�(d��ng)��(f��)λ�Ĺ��ܣ�XTAL1�cXTAL2�B�ӆ�Ƭ�C(j��)XTAL1��XTAL2���_���Ҳ�(li��n)�ɂ�(g��)30pFƥ�����ʹ��������
���چ�Ƭ�C(j��)P0������ͨI/O�ڕr(sh��)����ݔ�����ƽ��������������裬��(sh��)�H�·�У�ʹ��8*10K���������������衣
3.2 ���I�O(sh��)Ӌ(j��)
�I�P�چ�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)����һ��(g��)���P(gu��n)�I�IJ��������܌�(sh��)�F(xi��n)���Ƭ�C(j��)ϵ�y(t��ng)ݔ�딵(sh��)��(j��)���l(f��)������ȹ��ܣ����˹����A(y��)��Ƭ�C(j��)����Ҫ�ֶΡ����]�����O(sh��)Ӌ(j��)��(sh��)�H��Ҫ�İ��I�^�٣��ʲ��ê�(d��)��ʽ�I�P�ӿ��·�����nj�ÿ��(g��)��(d��)�����I��һ��һ�ķ�ʽֱ�ӽӵ���Ƭ�C(j��)��I/O���ϣ�ͨ�^��������ԃ��ʽ��(sh��)�F(xi��n)�c��Ƭ�C(j��)ϵ�y(t��ng)�����ġ��ڳ����ԃ��ʽ�£�ͨ�^I/O�˿��x�밴�I��B(t��i)����(d��ng)�а��I���r(sh��)������(y��ng)��I/O�˿�׃?y��u)���ƽ����δ�����µİ��I�����������������ƽ���@��ͨ�^�xI/O�ڵĠ�B(t��i)�Д��Ƿ��а��I���¡�ϵ�y(t��ng)���I�·��D3-3��ʾ��
�D�У�S2~S5���ǿ����@ʾ�õİ��I�������þ���ͨ�^����(d��ng)������(sh��)�F(xi��n)���ߵ;���Һλ���O(sh��)�á����w���f��S3��S4�քe��(sh��)�F(xi��n)��(sh��)�ֵ���һ�c�pһ��S2��S5�t����ߵ;���Һλ��ģʽ�x��ʹ_�J(r��n)�I��
�D3-3 ϵ�y(t��ng)���I�·
3.3 �@ʾ��ԪӲ���O(sh��)Ӌ(j��)
���@ʾ��Ԫ�ϣ�ʹ����74LS273�������r(sh��)犏�(f��)λ��λ�|�l(f��)���c74LS47��ꖘOBCD�@ʾ�g�a�(q��)��(d��ng)оƬ���ɂ�(g��)оƬ�Ĺ��_�D��D3-4��
74LS273�c74LS47���_�����f����
74LS273:1�_�Ǐ�(f��)λCLR�����ƽ��Ч����(d��ng)1�_�ǵ��ƽ�r(sh��)��ݔ���_2��Q0����5��Q1����6��Q2����9��Q3����12��Q4����15��Q5����16��Q6����19��Q7��ȫ��ݔ��0����ȫ����(f��)λ��
��(d��ng)1�_����ƽ�r(sh��)��11(CLK)�_���i����ƶˣ��������������|�l(f��)�i�棬��(d��ng)11�_��һ��(g��)�����أ������i��ݔ���_3��4��7��8��13��14��17��18���ƽ��B(t��i)�����������ʬF(xi��n)����ݔ���_2��Q0����5��Q1����6��Q2����9��Q3����12��Q4����15��Q5����16��Q6����19��Q7���ϡ�
74LS47��BI/ROB��LI��RBI���_��������_����Ҫ���ڜyԇ���}�_���ƣ�������ƽ��Ч���O(sh��)Ӌ(j��)�ϲ��m�ô��(xi��ng)���ܣ���˾��Ӹ��ƽ��A0~A3��BCDݔ�룬�ֽ�74LS273ݔ���ĸߡ�����λ��a~g���ڹ�ꖘO��(sh��)�a�ܵ�����(y��ng)���_���B�ӡ�
���˱��o(h��)LED��(sh��)�a�ܣ���74LS47�cLED֮�g����������裬�ԝM�㔵(sh��)�a�ܵĹ�����Ҫ��
����(j��)���ϵ��O(sh��)Ӌ(j��)˼·���O(sh��)Ӌ(j��)�·�D��D3-5��
3.4 �惦(ch��)��ԪӲ���O(sh��)Ӌ(j��)
�惦(ch��)ģ�K��Ӳ���O(sh��)Ӌ(j��)���^���Σ�����AT89S52��Ƭ�C(j��)�锵(sh��)��(j��)���c��8λ��ַ����(f��)�ã���Ҫʹ�õ�ַ�i��оƬ74LS373���������є�����ʹ��32KRAM����惦(ch��)оƬ������x���c51ϵ�м��ݵ�62256�S�C(j��)��(sh��)��(j��)�惦(ch��)����
ԓģ�K��ʹ�õăɂ�(g��)оƬ���_����D3-6��
��62256�У�A0~A14���_���ַ��������15λ����ַ�������_(d��)��32kB��I/O0~I/O7��8λ���B(t��i)�p��(sh��)��(j��)�ӿڣ�Vcc��Vss���Դ�͵أ�CS��Ƭ�x�ӿڣ����ƽ��Ч��OE/WE�քe���x�xͨ�͌��xͨ��(sh��)��(j��)ݔ��ݔ�뾀�����ƽ��Ч��
�D3-7 �惦(ch��)�Ć�Ԫ�·
74LS373���_λ�ú����c74LS273����^(q��)�e������1�_��ݔ��ʹ�ܣ�OE�����ǵ��ƽ��Ч����(d��ng)1�_�Ǹ��ƽ�r(sh��)������ݔ��3��4��7��8��13��14��17��18��Σ�Ҳ����11�_���i����ƶˣ�G����Σ�ݔ��2��Q0����5��Q1����6��Q2����9��Q3����12��Q4����15��Q5����16��Q6����19��Q7��ȫ���ʬF(xi��n)�����B(t��i)�����߽и��ՠ�B(t��i)������(d��ng)1�_�ǵ��ƽ�r(sh��)��ֻҪ11�_���i����ƶˣ�G���ϳ��F(xi��n)һ��(g��)�½��أ�ݔ��2��Q0����5��Q1����6��Q2����9��Q3����12(Q4)��15(Q5)��16(Q6)��19(Q7)�����ʬF(xi��n)ݔ���_3��4��7��8��13��14��17��18�Ġ�B(t��i)��74LS273Ҳ���������ַ�i�������ã����i�����r(sh��)����273���f��1��CLR���_��횽Ӹ��ƽ��ALE��̖��(j��ng)�^������11�_����?y��n)��Ƭ�C(j��)��ALE��̖�����½��ط�ʽ���F(xi��n)����373���f��1�_�ӵ��ƽ�����Cʹ�ܣ�11�_ֱ�ӽӆ�Ƭ�C(j��)��ALE��̖��
���ճ�Ҏ(gu��)���B�ӷ����O(sh��)Ӌ(j��)�·�D3-7��ʾ��
3.5 �r(sh��)�g��ԪӲ���O(sh��)Ӌ(j��)
DS1302�����^С���w�e��ռ��I/O���YԴ�ٵ����c(di��n)���dz��õĕr(sh��)�gоƬ���˴��O(sh��)Ӌ(j��)����DIP-8���b�����_������D3-8��
�D3-8 DS1302���_�D
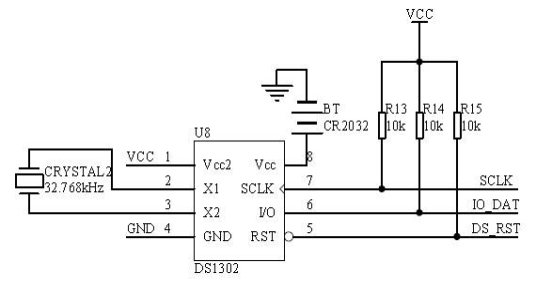
����Vcc1�����Դ��Vcc2�����Դ�������Դ�P(gu��n)�]����r�£�Ҳ�ܱ��֕r(sh��)犵��B�m(x��)�\(y��n)�С�DS1302��Vcc1��Vcc2������늉��^���߹�늡���(d��ng)Vcc2����Vcc1��0.2V�r(sh��)��Vcc2��늣���(d��ng)Vcc2С��Vcc1�r(sh��)��DS1302��Vcc1��늡�X1��X2����ʎԴ�ӿڣ����32.768kHz����RST�Ǐ�(f��)λ/Ƭ�x����ͨ�^��RSTݔ���(q��)��(d��ng)�ø��ƽ�톢��(d��ng)���еĔ�(sh��)��(j��)��ݔ��RSTݔ���ЃɷN���ܣ�����RST��ͨ����߉�����S��ַ/��������������λ�Ĵ��������Σ�RST�ṩ�Kֹ���ֹ�(ji��)����ֹ�(ji��)��(sh��)��(j��)�Ă����ֶΡ���(d��ng)RST����ƽ�r(sh��)�����еĔ�(sh��)��(j��)���ͱ���ʼ�������S��DS1302�M(j��n)�в�������������^����RST�Þ���ƽ���t��(hu��)�Kֹ�˴�ݔ��I/O���_׃?y��u)����B(t��i)������\(y��n)�Еr(sh��)����Vcc��2.5V֮ǰ��RST��횱��ֵ��ƽ��ֻ����SCLK����ƽ�r(sh��)�����܌�RST�Þ���ƽ��I/O�鴮�Д�(sh��)��(j��)ݔ��ݔ���ˡ�SCLKʼ�K��ݔ��ˣ��Á�ݔ�봮�Еr(sh��)���̖������(j��)DS1302�����c(di��n)���O(sh��)Ӌ(j��)�·��D3-9��
�D3-9 �r(sh��)�g��Ԫ�·
�ڌ�(sh��)�H��(y��ng)���У�����ơ�ݔ��ݔ��������(g��)�˿������^��������a(ch��n)����̖��?d��ng)_����˼�������������c��Ƭ�C(j��)P1�����B���ӏ�(qi��ng)��̖�ķ�(w��n)���ԣ����˱��C�r(sh��)犵Ŀɿ��ԣ���Vcc1��ʹ����CR2032�~��늳���������Դ��ݔ��늉���3V���Ķ����C��ϵ�y(t��ng)��늠�B(t��i)�£��r(sh��)��܉��^�m(x��)�����\(y��n)�С�
3.6 A/D�D(zhu��n)�Q��ԪӲ���O(sh��)Ӌ(j��)
A/D�D(zhu��n)�Qģ�K��ϵ�y(t��ng)���^����Ҫ��һ���֣������漰��ģ�M���֣�A/D�D(zhu��n)�Q���ĽY(ji��)��(g��u)�^���(f��)�s��
������ADC0804���_�����ܵĽ�B��
/CS оƬ�x����̖��
/RD �ⲿ�xȡ�D(zhu��n)�Q�Y(ji��)���Ŀ���ݔ����̖��/RD����ƽ�r(sh��)��DB0~DB7̎�ڸ��迹��/RD����ƽ�r(sh��)����(sh��)��(j��)�ŕ�(hu��)ݔ����
/WR �Á톢��(d��ng)�D(zhu��n)�Q�Ŀ���ݔ�룬�ஔ(d��ng)��ADC���D(zhu��n)�Q�_ʼ��/CS=0�r(sh��)������(d��ng)/WR�ɸ��ƽ׃?y��u)���ƽ�r(sh��)���D(zhu��n)�Q�����������(d��ng)/WR�ص����ƽ�r(sh��)���D(zhu��n)�Q��ʽ�_ʼ��
CLK IN��CLK R �r(sh��)�ݔ������ʎԪ����R��C���l�ʼs������100kHZ~1460kHZ�����ʹ��RC�·�t����ʎ�l�ʞ�1/��1.1RC����
/INTR �Д�Ո����̖ݔ��,�͵�ƽ��(d��ng)����
VIN(+) VIN(-) ���(d��ng)ģ�M늉�ݔ�롣ݔ��ζ���늉��r(sh��),VIN(-)�ӵأ������(d��ng)ݔ��r(sh��),ֱ�Ӽ���VIN(+) VIN(-)��
AGND,DGND ģ�M��̖�Լ���(sh��)����̖�Ľӵء�
VREF �o������늉���
DB0~DB7 8λ�Ĕ�(sh��)��ݔ����
VCC �Դ����(y��ng)�Լ������·�ą���늉���
�O(sh��)Ӌ(j��)�Mƫ늉���5V���tVREF�o������늉���5V/2=2.5V����10%���`�����(n��i)���o���^�ֿ��̅���늉���늉�Դ������ϵ�y(t��ng)��DC5V��늣����Ã�ֻ��ͬ��ֵ���։������ܽ��Ƶõ�2.5V�ą���늉���
ϵ�y(t��ng)��ʹ��10K����c150pF��ݽM��RC��ʎ�·������(j��)���g(sh��)�փ�Ӌ(j��)�㹫ʽ��

��3-1��
����ʎ�l�ʼs��606kHz���M��оƬҪ��
���⣬���迹��Һλ��������ģ�ͣ�Һλ��������ֵ׃���cҺλ�ĸ߶��dz����ȵģ������Ҫ�����ֵ�D(zhu��n)�Q��늉�ֵƥ��A/D�D(zhu��n)�Q�������õ��迹-늉��D(zhu��n)�Q����Wķ�������ڱ��y�迹�ɶ�늉������ڱ��y��裬�ɰѱ��y�迹�D(zhu��n)�Q��늉��y������

��3-2��
ʽ�У�

���D(zhu��n)��늉���

�㶨�����

�鱻�y��裬

�����ϵ��(sh��)����ˣ�Һλ�߶ȵ�׃��ͬ��������ݔ��늉����ʶ�A/D�D(zhu��n)�Q��ݔ���Ĕ�(sh��)��(j��)������Һλ�߶ȡ����˺����O(sh��)Ӌ(j��)�{(di��o)ԇ�^�̣�ʹ��ϵ�y(t��ng)��(n��i)��5V늉�����ģ�Mݔ�룬VIN(-)ֱ�ӽӵأ�ͨ�^����������։����迹�D(zhu��n)�Q��늉���̖�������λ���Ɍ�(sh��)�F(xi��n)ģ�Mݔ�롣
����(j��)���υ���(sh��)�������O(sh��)Ӌ(j��)�·��D3-11��
�D3-11 A/D�D(zhu��n)�Q��Ԫ�·�D
3.7 ͨ�ņ�ԪӲ���O(sh��)Ӌ(j��)
MAX485�H��8��(g��)���_���·�O(sh��)Ӌ(j��)���^���Ρ�
RO���_�ӵ���Ƭ�C(j��)���ڽ������_RXD��P3.0����DI���_�ӵ���Ƭ�C(j��)���ڰl(f��)�����_TXD��P3.1��������MAX485����p��ͨ�ŷ�ʽ������ͬ�r(sh��)�l(f��)�ͺͽ��Ք�(sh��)��(j��)��ֻ��ͨ�^����RE��DE���_�Ġ�B(t��i)���M(j��n)�аl(f��)�͔�(sh��)��(j��)�ͽ��Ք�(sh��)��(j��)���D(zhu��n)�Q�����˹�(ji��)ʡ��Ƭ�C(j��)I/O���YԴ����RE��DE���_�B��һ��ݔ����ƽ�r(sh��)��MAX485̎�ڽ��ՠ�B(t��i)��ݔ����ƽ�r(sh��)����̎�ڰl(f��)�͔�(sh��)��(j��)��B(t��i)�����xRE��DE�B����һ��ľW(w��ng)�j(lu��)��(bi��o)̖��E�������Ƭ�C(j��)P1�ڣ����ڰl(f��)���c���յ��D(zhu��n)�Q��A��B�˞�l(f��)�ͽ��ղ����̖�ˣ�һ������A,B��֮�g��ƥ����裬ƥ������120����
Ӳ���·��D3-13��
�D3-13 ����ͨ��ģ�K�·�D
3.8 ��������·���O(sh��)Ӌ(j��)
�^����·�O(sh��)Ӌ(j��)������ʹ�Æ�Ƭ�C(j��)I/O�ڵ��(q��)��(d��ng)����^�������M���^��������������(sh��)��Ҫ��������ʹ�����O���(q��)��(d��ng)�^������ϡ��O(sh��)Ӌ(j��)�·��D3-14��
���˷�ֹ�Դ����}�_���l(f��)�����ɔ_�Լ����l��̖���g����ϸɔ_�����Դ���̎��оƬ픶˻�ˣ�����ȥ����ݣ�������(qi��ng)ϵ�y(t��ng)�ķ�(w��n)���ԡ�
�Դָʾ���O(sh��)Ӌ(j��)��D3-15��
�D3-14 �^��������·�D
�D3-15 �Դָʾ���·�D
��4��ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
4.1 ϵ�y(t��ng)ܛ��
4.1.1 ϵ�y(t��ng)ܛ�����g�_�l(f��)�h(hu��n)��
8051ϵ�Ƭ�C(j��)������111�lϵ�y(t��ng)ָ��Ɍ�(sh��)�F(xi��n)51�N����������Ȼ���R���Z��ָ��s�г���Ŀ��x�Եͣ������_�l(f��)�ˆT���_�l(f��)�r(sh��)�g�L�c�_�l(f��)�y�ȴ�����ֲ�Բ��ȱ�c(di��n)��
C�Z����һ�N���g�ͳ����O(sh��)Ӌ(j��)�Z�ԡ�������˶�N���Z�Ե����c(di��n)�����߂�R���Z�ԵĹ��ܡ���C�Z�ԁ�����Ŀ��(bi��o)ϵ�y(t��ng)ܛ������(hu��)���s���_�l(f��)���ڣ�����ܛ���Ŀ��x�ԣ����ڸ��M(j��n)�͔U(ku��)�䡣��C�Z���M(j��n)��51ϵ�І�Ƭ�C(j��)�����O(sh��)Ӌ(j��)�dž�Ƭ�C(j��)�_�l(f��)�c��(y��ng)�õı�Ȼڅ�ݡ�
KEIL C51�_�l(f��)�����������څR��C�Z�Գ��R��Դ����朽ӺͶ�λĿ��(bi��o)�ļ��͎죬��(chu��ng)��HEX�ļ��Լ��{(di��o)ԇĿ��(bi��o)����
���O(sh��)Ӌ(j��)ʹ��KEIL C51 ��Vision3���_�l(f��)���g�h(hu��n)����ʹ��C�Z�Ծ�������(sh��)�F(xi��n)��ģ�K�����O(sh��)Ӌ(j��)��
4.1.2 ϵ�y(t��ng)���������̈D
ϵ�y(t��ng)������Ĺ�����Ҫ����Ɍ���Ƭ�C(j��)�ij�ʼ�����O(sh��)�þ���Һλ�������ޣ���(sh��)�r(sh��)�@ʾҺλֵ�Լ��I�P����ȹ��������������̈D��D4-1��ʾ��
4.1.3 ϵ�y(t��ng)��ʼ��
ԓģ�K��ϵ�y(t��ng)����_�C(j��)�r(sh��)��ϵ�y(t��ng)�˿ڡ���(sh��)��(j��)�惦(ch��)�^(q��)����(bi��o)־λ��ָᘡ���ַ���x���к��x��ֵ�����w�֞����ׂ�(g��)ģ�K�б�������
��4-1 ��ʼ������(sh��)�����x
| | | |
| | | A/D�D(zhu��n)�QоƬ��(sh��)��(j��)�x����ƣ���ʼ�鲻�x�� |
| | A/D�D(zhu��n)�QоƬ�D(zhu��n)�Q���ƣ���ʼ��ֹͣ |
| | ͨ�Ž��հl(f��)�Ϳ��ƣ���ʼ����� |
| | �@ʾ��(sh��)��(j��)�i����ƣ���ʼ�鱣�� |
| | �^������ƣ���ʼ��B(t��i)����_ |
| | | ��Ƭ�C(j��)Ƭ��(n��i)���r(sh��)/Ӌ(j��)��(sh��)�������ڷ�ʽ�� |
| | |
| | |
| |
| | |
| | |
| | ���S���пڽ��Ք�(sh��)��(j��) |
| | | ��ʼ��ϵ�y(t��ng)�r(sh��)�g��2011��1��1�� 0�r(sh��)0��0�������� ����sec,min,hr,date,mon,day,year ���Ξ��롢�֡��r(sh��)���ա��¡����ڡ��� |
| |
| |
| |
| |
| |
| |
��(sh��)��(j��)����(sh��)��ʼ�� | | | ��(sh��)��(j��)�惦(ch��)��B(t��i)��(bi��o)־�ֹ�(ji��)ָ� |
| | ��(sh��)��(j��)�惦(ch��)�^(q��)ָ� |
| | |
| | |
��ʼ���^���У��{(di��o)��A/D�D(zhu��n)�Qģ�K�@���״�Һλ��(sh��)��(j��)��ͬ�r(sh��)�����@ʾ����ɳ�ʼ������ |
�D4-1 ���������̈D
4.1.4 �@ʾ�cA/D�D(zhu��n)�Q�Ĕ�(sh��)��(j��)̎��
ϵ�y(t��ng)�У��@ʾݔ����Ҫ��鉺�sBCD�a����A/D�D(zhu��n)�Qݔ��Ĕ�(sh��)��(j��)��8λ16�M(j��n)�ƴa������ڌ�(sh��)�F(xi��n)�@ʾ֮ǰ��Ҫ���a���D(zhu��n)�Q����8λA/D�D(zhu��n)�Q�����ԣ���ʮ���M(j��n)�ơ������Mƫ늉����ʡ�����늉���ֵ���P(gu��n)ϵ����(y��ng)���4-2��
��4-2 A/D�D(zhu��n)�Q��ֵ��(sh��)��(j��)�P(gu��n)ϵ���ձ�
�C�ϣ�늉���ֵ�cҺλ�߶��ڔ�(sh��)ֵ������ȵġ�����ͨ�^LEDֱ�^�@ʾҺλ�߶ȣ��M(j��n)���D(zhu��n)�Q��˼·���£�
�O(sh��)ݔ��8λ���M(j��n)�Ɣ�(sh��)��(j��)��

��

���̼����Է��מ��λ��Һλ�߶Ȕ�(sh��)��(j��)������(sh��)�������מ��λ�Ĕ�(sh��)��(j��)�������@ʾλ��(sh��)�H��2λ�����λ����ף���ʹ�á��������롱���k���������׆�λ������(sh��)����(sh��)��(j��)

�����ˌ��@��(g��)��(sh��)��(j��)�D(zhu��n)�Q��鉺�sBCD�a���ٌ�

���õ�����������λ���ஔ(d��ng)�ڳ���16���鉺�sBCD�a����λ������(sh��)�鉺�sBCD�a����λ��������ӣ�������K�ĽY(ji��)����
�@ʾ�D(zhu��n)�Q���ֳ��������£�
uchar dis_transform(uchar num)
{
uchar ac, quotient, play, mid ;
ac = num%5;
quotient = (num-ac)/5;
if(ac>2)
quotient++;
ac=quotient%10;
mid=(quotient-ac)/10;
play=ac+mid*16;
return play;
}
4.1.5 ���I����ܛ���O(sh��)Ӌ(j��)
����ʹ�õİ��I�^�٣����Ա��IJ����˪�(d��)��ʽ�I�P����ÿ��(g��)���I�Ϊ�(d��)ռ��һ���ھ����ڳ����ԃ��ʽ�£�ͨ�^I/O�˿��x�밴�I��B(t��i)����(d��ng)�а��I���r(sh��)������(y��ng)�Ķ˿�׃?y��u)���ƽ���@��ͨ�^�x��I/O�ڠ�B(t��i)�Д��Ƿ��а��I���¡���ԃʽ�I�P�ij������̈D���£�
����o���I�P��������������֧����ʡ�ԡ�
void judge_key(void)
{uchar Key_value=0;
Key_value=P3&0x3c; /*�xȡ�Iֵ*/
switch��Key_value��
{
case 0x38:delay(30000); /*�{(di��o)���ӕr(sh��)�ӳ���*/
if(Key_value==(P3&0x3c)) /*�M(j��n)���Дఴ�I�Ƿ��ɔ_*/
{manage_key2();break;} /*�{(di��o)���Ӻ���(sh��)*/
else break;
����
case 0x1c:delay(30000);
if(Key_value==(P3&0x3c))
{manage_key5();break;}
else break;
default:break;
}
}
4.1.6 �@ʾģ�K��ܛ���O(sh��)Ӌ(j��)
����ʹ�����o�B(t��i)�i���@ʾ����Ҫ���@ʾ��(sh��)��(j��)�M(j��n)��̎�����M(j��n)���i����ơ�Ӳ���O(sh��)Ӌ(j��)��ʹ����74LS273�i�攵(sh��)��(j��)���������c(di��n)����ALEݔ����̖���½��ص���r(sh��)�i����̖����������ÿ������_���ƽ�����t�ׂ�(g��)�r(sh��)����ڴ���̖��(w��n)����P0��ݔ��̎����Ĕ�(sh��)��(j��)��ͬ�����t�ׂ�(g��)�r(sh��)����ڴ���̖��(w��n)�����������_�õ��ƽ����(sh��)��(j��)�i�棬�@ʾݔ����
Һλ�@ʾ���ֳ��������£�
display()
{
DIS=0;
_nop_();
_nop_();
_nop_();
P0=dis_transform(prelq);
_nop_();
_nop_();
_nop_();
DIS=1;
}
4.1.7 A/D�D(zhu��n)�Qģ�Kܛ���O(sh��)Ӌ(j��)
A/D�D(zhu��n)�Q�Ŀ���׃���Ѓɂ�(g��)����adWR�cadRD�����������f�������Ĺ��ܣ��ʲ����؏�(f��)��ԓģ�K�֞�ɂ�(g��)�A�Σ���һ�A���Ǟ�A/D�D(zhu��n)�Q����(d��ng)���ƣ�ͨ�^adWR��(f��)λ�����t����λ��ɡ��ڶ��A���ǔ�(sh��)��(j��)����ȡ�^�̣�����P0����ݔ��r(sh��)�����ԣ�����ܛ���ό�P0�ڼĴ����Þ�0xFF�����t�m��(d��ng)�r(sh��)�g��adRD��(f��)λ��ݔ��A/D�D(zhu��n)�Q�Y(ji��)�����S֮ͨ�^P0���x�딵(sh��)��(j��)��߀ԭadRD��ߣ�ԓ�A�νY(ji��)�����ɂ�(g��)�A���пɼ����m��(d��ng)?sh��)����t���ԝM��ADC0804 100ns���D(zhu��n)�Q�r(sh��)�g��
4.1.8 늙C(j��)����ģ�Kܛ���O(sh��)Ӌ(j��)
���O(sh��)Ӌ(j��)���Æ�Ƭ�C(j��)����оƬ�����^�������·�������(q��)��(d��ng)늙C(j��)�Ć���(d��ng)�c�P(gu��n)ͣ����������̈D��D4-3��ʾ��������Һλ�z�y�c늙C(j��)���Ʋ���Դ������a��
check_lq()
{
ad_start();
_nop_();
_nop_();
_nop_();
ad_read();
if(prelq>=uplq && key==1)
{
RELAY=1;
key=0;
makemark(1);
}
else if(prelq<=downlq && key==0)
{
RELAY=0;
key=1;
makemark(0);
}
}
4.1.9 ͨ�Ņf(xi��)�h��ͨ��ģ�Kܛ���O(sh��)Ӌ(j��)
1) ͨ�Ņf(xi��)�h
����ʹPC��λ�C(j��)�c�O(sh��)�䌍(sh��)�F(xi��n)�����x��ͨ�ţ��O(sh��)Ӌ(j��)�˺��ε�ͨ�Ņf(xi��)�h��
ͨ�Ų������O(sh��)Ӌ(j��)��4800bps���^�ߵIJ������ڛ]�Йz�m�e(cu��)��ʽ����r���װl(f��)����(sh��)��(j��)�āGʧ���^�͵IJ����ʕ�(hu��)ʹ��ݔ׃����8λ��Ч��(sh��)��(j��)λ���o��żУ�(y��n)λ��1λֹͣλ���������ֹ�(ji��)���λ���l(f��)�������c��(sh��)��(j��)��ͨ�Ņf(xi��)�h������������4-3��
ܛ���O(sh��)Ӌ(j��)�ϣ�ϵ�y(t��ng)�Բ�ԃ�ķ�ʽ�z�y��λ�C(j��)����������֣������r(sh��)�M(j��n)���푑�(y��ng)����(sh��)����푑�(y��ng)��ͨ�řz�y������D4-4��ʾ��
��4-3 ͨ�Ņf(xi��)�h
| | | |
| | | 푑�(y��ng)(li��n)�C(j��)�z�y�ɹ� |
| | | 푑�(y��ng)���r(sh��)�gָ��l(f��)��7�ֹ�(ji��)�r(sh��)�g��(sh��)��(j��) |
| �O(sh��)��ϵ�y(t��ng)�r(sh��)�g | | 푑�(y��ng)�ȕr(sh��)�gָ�����7�ֹ�(ji��)�r(sh��)�g��(sh��)��(j��) |
| | | 푑�(y��ng)�x��(d��ng)ǰҺλָ��l(f��)��1�ֹ�(ji��)Һλ��(sh��)��(j��) |
| | | 푑�(y��ng)�xӛ䛔�(sh��)��(j��)ָ��l(f��)��2�ֹ�(ji��)��(sh��)��(j��)��������(y��ng)��(sh��)��(j��) |
| | | 푑�(y��ng)�xҺλ������ָ��l(f��)��2�ֹ�(ji��)Һλ�����ޔ�(sh��)��(j��) |
| | | 푑�(y��ng)�O(sh��)��Һλ������ָ�����2�ֹ�(ji��)Һλ�����ޔ�(sh��)��(j��) |
| �x��(d��ng)ǰҺλ��늙C(j��)��B(t��i) | | 푑�(y��ng)�x��(d��ng)ǰҺλ��늙C(j��)��B(t��i)ָ��l(f��)��2�ֹ�(ji��)Һλ��(sh��)��(j��)��늙C(j��)��B(t��i) |
�D4-4 ͨ�řz�y���̈D
2)ͨ��ģ�K�Ŀ���
ԓģ�K�ڿ������O(sh��)Ӌ(j��)�ɂ�(g��)����(sh��)��һ��(g��)�ǰl(f��)�ͺ���(sh��)����һ��(g��)�ǽ��պ���(sh��)�����ڲ��ð��p����ͨ�ŷ�ʽ����Ҫ����׃��E����λ�c��(f��)λ�D(zhu��n)�Q�l(f��)���c���յĠ�B(t��i)��
�l(f��)�͵��^�̣���E��1��ʹϵ�y(t��ng)̎�ڰl(f��)�͔�(sh��)��(j��)��B(t��i)������(sh��)��(j��)���봮��ͨ�ž��_�^(q��)SBUF��
�ȴ���ֱ���l(f��)���ꮅ����E��0�����ؽ��ՠ�B(t��i)��
�����^�̣�����E��ʹϵ�y(t��ng)̎�ڽ��ՠ�B(t��i)���ȴ���ֱ�������ꮅ���x����ͨ�ž��_�^(q��)SBUF���^�m(x��)���ֽ��ՠ�B(t��i)��
�@�ɂ�(g��)�ӳ�������������(sh��)��Ҫ�M(j��n)�д���ͨ�ŕr(sh��)�{(di��o)�ü��Ɍ�(sh��)�F(xi��n)�c��λ�C(j��)�Ĵ���ͨ�š�
4.1.10 �r(sh��)�gģ�Kܛ���O(sh��)Ӌ(j��)
DS1302��(n��i)���Ĵ����Ķ��xֱ��Ӱ���ܛ�����O(sh��)Ӌ(j��)����ſɷ֞�r(sh��)�g���ƼĴ����̓�(n��i)��RAM�Ĵ��������У�
- CH�� �r(sh��)�ֹͣλ�Ĵ���2�ĵ�7λ12/24С�r(sh��)��(bi��o)־
CH=0 ��ʎ���������Sbit7=1��12С�r(sh��)ģʽ
CH=1 ��ʎ��ֹͣbit7=0��24С�r(sh��)ģʽ
- WP�� �����o(h��)λ�Ĵ���2�ĵ�5λ��AM/PM���x
WP=0 �Ĵ�����(sh��)��(j��)�܉�?q��)��?AP=1 ����ģʽ
WP=1 �Ĵ�����(sh��)��(j��)���܌��� AP=0 ����ģʽ
- TCS�� �������x��DS�����O���x��λ
TCS=1010 ʹ�������� DS=01 �x��һ��(g��)���O��
TCS=���� ��ֹ������ DS=10 �x��ɂ�(g��)���O��
DS=00 ��11, ��ʹTCS=1010, ��늹���Ҳ����ֹ
��4-4 RS��B(t��i)��(bi��o)־�����x
����DS1302��(sh��)��(j��)��ݔ��ʽ�鴮����λݔ��ݔ������ַ����(sh��)��(j��)�Č�������������ͬ�ġ���ַ�]���x�������oՓ���x߀�nj������߽Y(ji��)��(g��u)��ơ��x���ĺ����Ǯa(ch��n)��SCLK��λ��̖�c��λ���x�����nj���(sh��)��(j��)��DS1302��I/O�������Ƭ�C(j��)���������nj���(sh��)��(j��)�Ć�Ƭ�C(j��)����DS1302�r(sh��)�оƬ���҂���K̎���Č����Ǖr(sh��)�g��(sh��)��(j��)���B(t��i)��(sh��)��(j��)���ګ@ȡ��(sh��)��(j��)�r(sh��)�����Ȍ����ַ��Ȼ���xȡ��(sh��)��(j��)�����딵(sh��)��(j��)�r(sh��)���Ȍ����ַ����ݔ����(sh��)��(j��)����ɕr(sh��)�g��ģ�Kܛ�����O(sh��)Ӌ(j��)��DS1302�x���������£�
ds_read()
{
uchar j;
iodat=0x00;
for(j=8;j>0;j--)
{
iodat=iodat>>1;
odat7=IO_DATA;
_nop_();
SCLK=1;
_nop_();
SCLK=0;
}
}
ds_write(uchar ad)
{
uchar i;
ddat=ad;
for(i=8;i>0;i--)
{
IO_DATA=ddat0;
_nop_();
SCLK=1;
_nop_();
ddat=ddat>>1;
SCLK=0;
}
}
51ϵ�І�Ƭ�C(j��)����Ƭ��惦(ch��)���x����ָ��MOVX���o���Ñ��(f��)�s�Ŀ��ơ�ݔ���̎�������ʲ��������
4.2 ��λ�C(j��)ܛ���O(sh��)Ӌ(j��)
4.2.1 ��λ�C(j��)ܛ���_�l(f��)���g�h(hu��n)��
VC++��Microsoft��ܛ���_�l(f��)����Windowsƽ�_��(g��u)��32λ��(y��ng)�ó���ď�(qi��ng)����֏�(f��)�s�Ŀ�ҕ���_�l(f��)ƽ�_������������ʹ�������_�l(f��)����֮һ��VC++�đ�(y��ng)�÷dz��V���������摪(y��ng)�ó�����(w��)����ܛ������ϵ�y(t��ng)ܛ������(y��ng)��ܛ�����ĆΓ����ֲ�ʽ��(y��ng)�ó��ĈD�ΈD��̎�����Α���_�l(f��)��VC++�o̎���ڡ�
Ŀǰ����VC++�l(f��)չ�v���������ˮa(ch��n)���˶���(g��)�汾���汾�ĸ������˸����^�IJ������棬�����Ի��IJ�����ʽ������(qi��ng)��ijЩģ�K�Ĺ��ܡ�ͬ�r(sh��)������ͬ�_�l(f��)�����Ƴ��˶��(xi��ng)�a(ch��n)Ʒ��VC++6.0��Microsoft�����Ƴ��Įa(ch��n)Ʒ���������Խ��溆����ռ���YԴ�١��������㡢���P(gu��n)�Y���S���ȃ�(y��u)�c(di��n)���Ԟ�V������_�l(f��)�ˆTʹ�á�
��ϵ�y(t��ng)��λ�C(j��)ܛ��ʹ��VC++ 6.0�_�l(f��)Windowsƽ�_�µđ�(y��ng)��ܛ����
��λ�C(j��)ܛ���O(sh��)Ӌ(j��)Ҫ��
��λ�C(j��)ܛ���Dz����ˆT�c�O(sh��)Ӌ(j��)ϵ�y(t��ng)������һ��(g��)ƽ�_��ϵ�y(t��ng)�Ĵ����(sh��)�o������ͨ�^��λ�C(j��)ܛ���cϵ�y(t��ng)�O(sh��)��ͨ�ſ�����ɡ���λ�C(j��)ܛ�������е�ϵ�y(t��ng)ܛӲ�����A(ch��)�����^����_�l(f��)���g����(qi��ng)���ܵ���λ�C(j��)ܛ��������(g��)ϵ�y(t��ng)����ȱ�ٵ�һ���֡���ˣ��˴��O(sh��)Ӌ(j��)����λ�C(j��)ܛ���������¹��ܣ�
- �܉��cϵ�y(t��ng)�O(sh��)���M(j��n)�н���ͨ���B�ӡ�
- �܉�?q��)��r(sh��)�O(ji��n)��ϵ�y(t��ng)�O(sh��)��@ȡ��Һλ��늙C(j��)��B(t��i)�ȅ���(sh��)��
- �܉�@ȡϵ�y(t��ng)�O(sh��)�䮔(d��ng)ǰҺλ��ϵ�y(t��ng)�r(sh��)�g���ߵ�Һλ���侀�ȅ���(sh��)��
- �܉��O(sh��)��ϵ�y(t��ng)�O(sh��)��Һλ��ϵ�y(t��ng)�r(sh��)�g���ߵ�Һλ���侀�ȅ���(sh��)��
- �܉��xȡϵ�y(t��ng)�O(sh��)��ӛ䛵Ĕ�(sh��)��(j��)��
- �܉�?q��)��ѽ?j��ng)�@ȡ�Ĕ�(sh��)��(j��)�M(j��n)���@ʾ�����桢��(sh��)��(j��)̎����������(sh��)ֵ�������L�D����
4.2.2 ��λ�C(j��)ܛ���Ľ����O(sh��)Ӌ(j��)
ֱ�^�����ԵĽ����O(sh��)Ӌ(j��)�܉�?y��n)�ܛ��ʹ���ߎ����ܶ�ķ��㣬ͬ�r(sh��)Ҳ�܉�?y��n)���������̵�ӡ������O(sh��)Ӌ(j��)�cܛ���Ĺ���ϢϢ���P(gu��n)���������õČӴνY(ji��)��(g��u)��ʹܛ��ʹ���߸��������֡�
�ڝM��������λ�C(j��)ܛ����Ҫ���£��O(sh��)Ӌ(j��)��һ��(g��)�����ڣ���퓘�(bi��o)���Ӵ��ڵ��O(sh��)Ӌ(j��)���������c����(g��)��(bi��o)��퓵��Ӵ��ڵ����P(gu��n)����Ҋ��4-5��
��4-5 ���湦������
| | |
| | |
| ����(d��ng)���o���º������@ʾ��(sh��)�r(sh��)Һλ�� |
| ����(d��ng)���o���º������@ʾ��(sh��)�r(sh��)늙C(j��)�_��/�P(gu��n)�]��B(t��i)�� |
| ����(d��ng)��(sh��)�r(sh��)�O(ji��n)�أ���ʼ�r(sh��)�����ã������ڴ��_�ɹ���(li��n)�C(j��)�ɹ���׃?y��u)���à�B(t��i)�� |
��(bi��o)��һ������(li��n)�C(j��)�� | | �����x���пڣ��x��COM1-COM8 |
| �ڴ���̖�x���ʹ�ô˰��o����Ӳ�������B�ӣ��ڴ��ڴ��_�r(sh��)��ԓ���o�@ʾ�� �P(gu��n)�]���ڣ��Á���_���ڵ��B�ӡ� |
| ԓ���o��ʼ�r(sh��)�����ã��ڴ��_���ں����à�B(t��i)���Á��cϵ�y(t��ng)�O(sh��)���M(j��n)���B�ӣ����@ʾ(li��n)�C(j��)��B(t��i)�� |
��(bi��o)�������r(sh��)�g�x�(xi��ng)�� | �xȡ�O(sh��)��r(sh��)�g���o | ԓ���o��ʼ�r(sh��)�����ã��ڴ��_������(li��n)�C(j��)�ɹ���׃?y��u)���á��Á��xȡϵ�y(t��ng)�O(sh��)��r(sh��)�g���@ʾ�� |
�O(sh��)��ϵ�y(t��ng)�r(sh��)�g���o | ԓ���o��ʼ�r(sh��)�����ã��ڴ��_������(li��n)�C(j��)�ɹ������à�B(t��i)���Á���ϵ�y(t��ng)�O(sh��)�䌑��PC�C(j��)��(d��ng)ǰ�r(sh��)�g�� |
�O(sh��)��ָ���r(sh��)�g���o | ԓ���o��ʼ�r(sh��)�����ã��ڴ��_������(li��n)�C(j��)�ɹ������á��Á���ϵ�y(t��ng)�������ڕr(sh��)�gϵ�нM�Ͽ��x���r(sh��)�g�� |
| �x���r(sh��)�g���ڣ������O(sh��)��ָ���r(sh��)�g���o�r(sh��)�g�Č��롣�O(sh��)��������2000��1��1��0�r(sh��)0����2099��12��31��23�r(sh��)59��֮�g�� |
��(bi��o)������Һλ�x�(xi��ng)�� | | ԓ���o��ʼ�r(sh��)�����ã��ڴ��_������(li��n)�C(j��)�ɹ������à�B(t��i)���xȡϵ�y(t��ng)�O(sh��)�䮔(d��ng)ǰҺλ���@ʾ�� |
| ԓ���o��ʼ�r(sh��)�����ã��ڴ��_������(li��n)�C(j��)�ɹ������à�B(t��i)���xȡϵ�y(t��ng)�O(sh��)�䮔(d��ng)ǰ�ߵ�Һλ���侀���@ʾ�� |
| ԓ���o��ʼ�r(sh��)�����ã��ڴ��_������(li��n)�C(j��)�ɹ������à�B(t��i)���O(sh��)��ϵ�y(t��ng)�O(sh��)��ߵ�Һλ���侀���O(sh��)�Ô�(sh��)��(j��)������Һλ���K�ṩ�� |
| �_����Һλ����(sh��)���O(sh��)�÷��������ڮ�(d��ng)ǰ��Һλ���K����(sh��)ֵ��С��5�ס� |
| �_����Һλ����(sh��)���O(sh��)�÷�����С�ڮ�(d��ng)ǰ��Һλ���K����(sh��)������0�ס� |
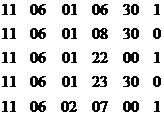
��(bi��o)���ģ���(sh��)��(j��)�x�(xi��ng)�� | | ԓ���o��ʼ�r(sh��)�����ã��ڴ��_������(li��n)�C(j��)�ɹ������à�B(t��i)���xȡϵ�y(t��ng)�O(sh��)��ӛ䛔�(sh��)��(j��)����ɺ��@ʾ����ӛ䛔�(sh��)��(j��)�(xi��ng)Ŀ��(sh��)�� |
| ������Ք�(sh��)��(j��)���ı��ļ���Ĭ�J(r��n)�ļ�����Rec**.txt��(**�锵(sh��)�֣�����������) |
| ׃���ļ�����·����Ĭ�J(r��n)·����C:\COMDATA\ |
| �����@ʾ�xȡ��(sh��)��(j��)�� |
| ʹ�ý��Ք�(sh��)��(j��)Ӌ(j��)���ˮ�� |
| ʹ�ý��Ք�(sh��)��(j��)�L�ƈD�� |
�����O(sh��)Ӌ(j��)Ч����D4-5��ʾ��
�D4-5 ��λ�C(j��)ܛ������Ч���D
4.2.3 ��λ�C(j��)����ͨ�Ź��ܵČ�(sh��)�F(xi��n)
��VC++�У�������Ĵ��ڲ�����ʹ��Windows API��Application Programming Interface����ɵġ�Windows �@��(g��)�����I(y��)ϵ�y(t��ng)���˅f(xi��)�{(di��o)��(y��ng)�ó���Ĉ�(zh��)�С������(n��i)�桢�����YԴ֮�⣬��ͬ�r(sh��)Ҳ��һ��(g��)�ܴ�ķ���(w��)���ģ��{(di��o)���@��(g��)����(w��)���ĵĸ��N����(w��)��ÿһ�N����(w��)����һ��(g��)����(sh��)�������Ԏ͑�(y��ng)�ó�ʽ�_(d��)���_��ҕ�������L�D�Ρ�ʹ����߅�O(sh��)���Ŀ�ģ������@Щ����(sh��)����(w��)�Č����Ǒ�(y��ng)�ó���Application�������QAPI��ͨ�^ʹ��API����(sh��)���ƌ�(sh��)�F(xi��n)����ͨ��Ҫ��(f��)�sһЩ�����ǿ����M(j��n)����Ӵε�ʹ�á�
ܛ�]�О鴮�ڲ����ṩ����(y��ng)ֱ�ӵ�MFC��Microsoft Foundation Classes���Ȼ��ܛ�ṩ�˴��ھ��̿ؼ�MSComm��Microsoft Communications Control����MSComm��ܛ��˾�ṩ�ĺ���Windows�´���ͨ�ž��̵�ActiveX�ؼ����鑪(y��ng)�ó����ṩ��ͨ�^���п��հl(f��)��(sh��)��(j��)�ĺ��㷽����MSComm�ؼ��ھ��̕r(sh��)���^���㣬����T����ȥ���r(sh��)�g�˽��^���(f��)�s��API����(sh��)�����ṩһϵ�И�(bi��o)��(zh��n)ͨ�������ʹ�ýӿڣ����������Խ����c���ڵ��B�ӣ�������ͨ�^�����B�ӵ�����ͨ���O(sh��)�䣬�l(f��)��������Q��(sh��)��(j��)�Լ��O(ji��n)ҕ��푑�(y��ng)�����B���аl(f��)�����¼����e(cu��)�`��
�ڱ��O(sh��)Ӌ(j��)�У���ʹ����MSComm�ؼ��M(j��n)�д��ھ��̡�
����ͳ�����ʹ�õ�MSComm�ؼ�����Ҫ���������f����
���ܣ��O(sh��)�ò����ض˿�̖
�f��������̖�O(sh��)�÷��ط�����1��16��
���ܣ���MSComm�ؼ��O(sh��)��CommEvent���Ԟ�ComEvRecevie���a(ch��n)��OnComm�¼�֮ǰ���O(sh��)�ò�����Ҫ���ܵ��ַ���(sh��)��
�f�������վ��_�^(q��)���յ�ָ���ַ��r(sh��)����OnComm�¼�����(d��ng)ָ���ַ��O(sh��)�Þ��㣬���a(ch��n)��OnComm�¼���
���ܣ��O(sh��)�÷��ز����ʡ���żУ�(y��n)����(sh��)��(j��)λ��ֹͣλ����(sh��)��
�f�����O(sh��)�Õr(sh��)���ַ����������ַ���ָᘂ��f����(sh��)����ʽ�顰BBB,P,D,S��
BBBB�鲨���ʣ�P����żУ�(y��n)��D�锵(sh��)��(j��)λ��(sh��)��S��ֹͣλ��(sh��)��
���ܣ��Ľ��܅^(q��)��(n��i)�xȡ��(sh��)��(j��)��
�f��������?c��i)?sh��)��(j��)��͞�VARIANT��׃����ԓ�����ڴ��ڛ]�д��_�r(sh��)�����ã����\(y��n)�Еr(sh��)ֻ�x��
��(d��ng)InputMode���Ԟ�0�r(sh��)��׃���к���String�͔�(sh��)��(j��)��
��(d��ng)InputMode���Ԟ�1�r(sh��)��׃���к���Byte�͔�(sh��)��(j��)��
���ܣ��뾏�_�^(q��)����(sh��)��(j��)���l(f��)�;��_�^(q��)��(d��ng)ǰ��(sh��)��(j��)��
�f�������뾏�_�^(q��)׃����͞�VARIANT���l(f��)�Ͷ��M(j��n)�Ɣ�(sh��)��(j��)�r(sh��)����Byte�͔�(sh��)��(j��)����VARIANT��׃���С�
���ܣ����_���P(gu��n)�]���ڣ����߷��ش����_���P(gu��n)��B(t��i)
�f��������?y��n)��?sh��)��BOOL�У���TRUE�r(sh��)�����_���ڣ���FALSE�r(sh��)�P(gu��n)�]���ڡ�
���ڵ�ʹ����Ҫ��ʼ����һ���ʼ����Ҫ���ׂ�(g��)���E��
- �x��̖
- �x��ݔ�뷽ʽ
- �O(sh��)��ݔ��ݔ�����_�^(q��)��С
- �O(sh��)�ò����ʡ���żУ�(y��n)����(sh��)��(j��)λ��(sh��)��ֹͣλ��(sh��)����(sh��)
- ���_����
- �O(sh��)�ý��վ��_�^(q��)���ն��ٔ�(sh��)��(j��)푑�(y��ng)OnComm�¼�
- �O(sh��)�î�(d��ng)ǰ���܅^(q��)�L��
- ���A(y��)�x���_�^(q��)�����������(sh��)��(j��)
�ڴ��ڳ�ʼ����ɸ���(j��)�O(sh��)��푑�(y��ng)OnComm�¼�����OnComm�¼�̎������(sh��)�Ќ���(sh��)��(j��)�M(j��n)������(y��ng)��̎����
�ڴ˴���λ�C(j��)ܛ����OnComm�¼�̎����˼·���@�ӵģ����ڲ��õ�������ʽͨ�ŷ�ʽ����ij��(g��)���ܰ��o���º���λ�C(j��)ʹ��SetOutPut����(sh��)�l(f��)��ָ��ȴ�ϵ�y(t��ng)�O(sh��)���푑�(y��ng)�������յ��O(sh��)��푑�(y��ng)�r(sh��)��푑�(y��ng)OnComm�¼�������(j��)���ص�ָ���O(sh��)����һ��푑�(y��ng)OnComm�¼����ַ���(sh��)��l(f��)������(y��ng)�Ĕ�(sh��)��(j��)���@���O(sh��)Ӌ(j��)�ă�(y��u)�c(di��n)�ǽY(ji��)��ϵ�y(t��ng)ܛ�����O(sh��)Ӌ(j��)���ڛ]����żУ�(y��n)�Ȳ��e(cu��)���Ƶ���r�£��M�����C�l(f��)�͡����Ք�(sh��)��(j��)�������ԡ�������ϵ�y(t��ng)�ڔ�(sh��)��(j��)̎��r(sh��)�Ĕ�(sh��)��(j��)�Gʧ����(j��ng)��(sh��)�`�C�����@�ӵ��k���ǿ��еġ�
4.2.4 ��λ�C(j��)ܛ���еĔ�(sh��)��(j��)̎��
����MFC�µľ����O(sh��)Ӌ(j��)�S�ͬ�����ͬ��еijɆT׃���c�ɆT����(sh��)����(sh��)����Ͳ��M��ͬ������ڌ�(sh��)�F(xi��n)ijЩ����(sh��)���f���^���в�����Ҫ����(sh��)��͵��D(zhu��n)�Q���@Ҳ�Ǵ˴���λ�C(j��)ܛ���O(sh��)Ӌ(j��)���y�c(di��n)֮һ��
��ܛ���ľ����^�����O(sh��)Ӌ(j��)�����ׂ�(g��)�(sh��)��ͣ�
CString�CString��һ�N�����õĔ�(sh��)��(j��)��͡������ܴ�̶��Ϻ�����MFC�е��S�������ʹ��MFC�����ַ��������ĕr(sh��)���˺ܶࡣ��ܛ���У�CString��Ҫ�Á���ҕ��ݔ����
Byte��ͣ�Byte���ֹ�(ji��)��ͣ�����ͨ���^�����д����Ķ��M(j��n)�Ɣ�(sh��)��(j��)��ݔ�����Byte����DZز����ٵġ�
VARIANT��ͣ�ʹ��MSComm�ؼ����ڰl(f��)�ͺͽ��Ք�(sh��)��(j��)�r(sh��)����Ҫ�õ�VARIANT��(sh��)��(j��)��ͣ�VARIANT��(sh��)�H����һ�N�����w�����ɸ��N��͵ĵĔ�(sh��)��(j��)�ɆT��(g��u)�ɡ�
Byte�D(zhu��n)CString��CString�б�������ַ���ASKII�a�����ֱ�ӌ�Byte��(qi��ng)���D(zhu��n)�Q��CString�Dz��еģ���?y��n)�Byte������Ƕ��M(j��n)�Ɣ�(sh��)��(j��)����(qi��ng)���D(zhu��n)�Q�ĽY(ji��)�����@ʾ�r(sh��)�����F(xi��n)�y�a�������Ҫ���И�(g��u)���D(zhu��n)�Q����(sh��)�������O(sh��)��ϵ�y(t��ng)ܛ����̎���ݔ?sh��)Ĕ?sh��)��(j��)�鉺�sBCD�a����ˣ�������λ+48�ط�����Byte�D(zhu��n)�Q��CString��
Byte�D(zhu��n)VARIANT��Byte����ֱ���D(zhu��n)�Q��VARIANT���ַ�����ʽ�l(f��)�͔�(sh��)��(j��)���@������CbyteArray��cCOleVariant��g���M(j��n)���D(zhu��n)�Q������ʹ��CbyteArry�ijɆT����(sh��)Add()��Byte�����B�ӳ�CbyteArray�ַ�����ʹ��ColeVariant�CbyteArray��(qi��ng)���D(zhu��n)�Q��VARIANT���M(j��n)�д��аl(f��)�͡�
VARIANT�D(zhu��n)Byte��ͬ�ӣ�����֮�g����ֱ���D(zhu��n)�Q����Ҫ����COleSafeArray��g���M(j��n)���D(zhu��n)�Q���F(xi��n)��VARIANT��(qi��ng)���D(zhu��n)�Q��COleSafeArray����ʹ��COleSafeArray��GetElement�ɆT����(sh��)����(sh��)��(j��)�D(zhu��n)�Q��Byte��͡��@�N�D(zhu��n)�Q�ڽ��Ք�(sh��)��(j��)�r(sh��)���F(xi��n)��
��Q����͵��D(zhu��n)�Q���}���ڰl(f��)�͡����ա���(sh��)��(j��)�@ʾ����(sh��)��(j��)�\(y��n)��ȷ����ɸ���(j��)��Ҫʹ������(y��ng)�Ĕ�(sh��)��(j��)����ˡ�
�Y(ji��)Փ�cչ��
�˴Κv�r(sh��)һ�W(xu��)�ڵ��O(sh��)Ӌ(j��)�о�������������˜\������˴�������Ӣ���Y�ϣ������S���(y��n)�C��ԇ�(y��n)������K�O(sh��)Ӌ(j��)����ɴ����ˈ�(ji��n)��(sh��)�Ļ��A(ch��)���O(sh��)Ӌ(j��)�о����^��Ҳ��һ��(g��)�W(xu��)��(x��)���^�̣�����ʹ�õ��S��֪�R�����g(sh��)�Ǵ�W(xu��)��δ�漰�ģ��@����Ҫ�ڶ̕r(sh��)�g��(n��i)���@Щ֪�R�����g(sh��)�W(xu��)�����á����@��Ҍ��˴��O(sh��)Ӌ(j��)��ֵ��ע��ĵط����Կ��Y(ji��)��
�Ԇ�Ƭ�C(j��)����A(ch��)�đ�(y��ng)��ϵ�y(t��ng)���_�l(f��)��һ��(g��)������^�̣�ͬ�r(sh��)Ҳ��һ��(g��)��(j��ng)�(y��n)�e�۵��^�̡�һ��(g��)���S���_�l(f��)��(j��ng)�(y��n)���_�l(f��)�ˆT��Ӳ������ӑՓ���·�O(sh��)Ӌ(j��)��ܛ���O(sh��)Ӌ(j��)���{(di��o)ԇ���^�����܉������Ч���_չ����(g��)�A�εĹ������p���e(cu��)�`�İl(f��)�����s���аl(f��)���ڡ���ˣ���������܉�e�۹����ˆT�Ľ�(j��ng)�(y��n)������ܣ��ڮa(ch��n)Ʒ�аl(f��)���^�����܉�����ͻ�ƣ�������(chu��ng)�¡�
��Ӽ��g(sh��)��(y��ng)�ÏV���O(sh��)Ӌ(j��)�I(l��ng)��ࡣ����Ϥ���ļ��g(sh��)�����⣬�_�l(f��)�O(sh��)Ӌ(j��)�ˆT߀�茦��������(g��)�ИI(y��)�����˽⣬�@�Ӳ���ʹ�a(ch��n)Ʒ�Ĺ��ܸ��N����(sh��)�H��������������֮��Ч��
���g(sh��)�ĸ��������®������˱��C�_�l(f��)�a(ch��n)Ʒ�ɱ����͡����ܸ���(qi��ng)���_�l(f��)�����ף����ڸ��̣�����·�O(sh��)Ӌ(j��)�_�l(f��)�ˆT��Ҫ����،W(xu��)��(x��)�����¼��g(sh��)���c�r(sh��)���M(j��n)��
Һλ�y���O(ji��n)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�Ļ������ܵČ�(sh��)�F(xi��n)���f���O(sh��)Ӌ(j��)˼·�Ŀ����ԡ�Ȼ�����ڱ����O(sh��)Ӌ(j��)�������S��㡣
���ڕr(sh��)�g�;������ޣ�����λ�C(j��)ܛ���O(sh��)Ӌ(j��)�ϣ�δ����(sh��)��(j��)̎��ģ�K�M(j��n)���M(j��n)һ���Č�(sh��)�F(xi��n)�cӑՓ�����ڌ��I(y��)֪�R���ޣ��ڴ˃H����Լ�һЩ�\���Ŀ�����
�ȼ��O(sh��)����5�(xi��ng)���յĔ�(sh��)��(j��)���磺
�O(sh��)ˮ������Һλ�g�ݷe��V��ˮ�Æ�λ�r(sh��)�g��ˮ���㶨��m���O(sh��)5�(xi��ng)��(sh��)��(j��)�������(xi��ng)�g�g���r(sh��)�g��

��

��

��

����һ�(xi��ng)�������(xi��ng)���r(sh��)�g��T��m��V����֪����t1~t4�Լ�T��ͨ�^�@�õĔ�(sh��)��(j��)Ӌ(j��)��õ����O(sh��)ij�Εr(sh��)�g��(n��i)ƽ����ˮ����

��

ˮ�Æ���(d��ng)���g�r(sh��)ƽ����ˮ����

��

ˮ��ֹͣ���gƽ����ˮ����

��
ͨ�^ӛ䛵Ĕ�(sh��)��(j��)����(j��ng)�^Ӌ(j��)�㣬��ɫ@�Æ�λ�r(sh��)�g��(n��i)ƽ����ˮ���������Ĕ�(sh��)��(j��)���Y(ji��)������(y��ng)����Փ�㷨�����п�����ȡ���Ѓr(ji��)ֵ�ķ����c�Ɯy��
�c��ͬ�r(sh��)������(j��)�����e����(sh��)��(j��)ʹ��Matlab�L�ƈD�Σ��@��(g��)����ʹ��VC++�����L���������������D5-1��
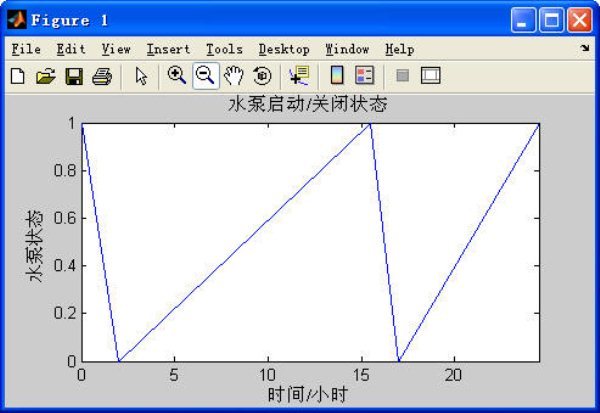
�D5-1 Matlab�L�ƈD��
ͨ�^�D�Σ��҂������^��ֱ����б�ʣ�ֱ�^���^���ijһ�r(sh��)�g�κ�ˮ�Ŀ����̶ȡ�
��(d��ng)Ȼ���@�H�H��һ��(g��)ʮ�ֺ��ε��e����Ӌ(j��)�㡢�L�D������һ���ƌW(xu��)��Ч���H�����l(f��)˼�S�����á�
�ڏ�(f��)�s��Ӌ(j��)������У��H��ˮ�à�B(t��i)׃���r(sh��)ӛ䛔�(sh��)��(j��)�����Dz���ģ�һ�(xi��ng)��(sh��)��(j��)�ă�(n��i)��Ҳ�����S�����҂�����ϵ�y(t��ng)�����У����������ɂ�(g��)��(sh��)��(j��)ӛ��c(di��n)ӛ䛔�(sh��)��(j��)��ͬ�r(sh��)�����ӌ�(sh��)�r(sh��)�ߵ�Һλ�g�ݷe��(sh��)��(j��)�ȃ�(n��i)�ݣ����Ɣ�(sh��)��(j��)�Y(ji��)��(g��u)��
�M��ϵ�y(t��ng)�O(sh��)Ӌ(j��)��ʼ�K��������r�£��]�п��]�F(xi��n)��(sh��)���fһ��늵Ĕ�(sh��)��(j��)���o(h��)���}����Q�@��(g��)�������ԔU(ku��)չ������FLASH�惦(ch��)������ʹ��늣��ѽ�(j��ng)����Ĕ�(sh��)��(j��)Ҳ����(hu��)�Gʧ��
���O(sh��)Ӌ(j��)�Л]�м���ϵ�y(t��ng)�����O(sh��)Ӌ(j��)���Y(ji��)�ό�(sh��)�H��r�������ӿ��T���·����ʹ�Æ�Ƭ�C(j��)��(n��i)�����T������ֹ�������w��
�˶�ˮ�٣�ˮ�YԴ�r(sh��)�շֲ�������ˮ���YԴ�c��(j��ng)��(j��)���(hu��)�l(f��)չ���ֲ���ƥ�䣬���҇��Ļ���ˮ�顣���^���v��ͨ�^��Һλ׃���ķ������y(t��ng)Ӌ(j��)ijһ�^(q��)��ˮ������ˮ�YԴ�Ľy(t��ng)�I�{(di��o)���������x�ġ��^���f������(j��)�y(t��ng)Ӌ(j��)����(sh��)��(j��)Ӌ(j��)��ijһˮ����һ���ýy(t��ng)Ӌ(j��)Ҏ(gu��)������ѵĸߵ;��侀λ�ã��Ķ��p��ˮ�Æ���(d��ng)�Δ�(sh��)��������Դ���ģ����Lˮ�����É�����
�ڡ�ʮ���塱���g��ˮ�����������M(j��n)һ�����ƣ�ˮ�����A(ch��)���O(sh��)����������F(xi��n)�����������h�ƌW(xu��)�l(f��)չ�^��ָ��(d��o)�£����͡��h(hu��n)�������пɳ��m(x��)�l(f��)չ�O(sh��)Ӌ(j��)˼����O(sh��)��x�������˂���ҕ��
�� �x
���ęn���ڸ��ĸ��ώ���Ϥ��ָ��(d��o)����ɵġ���(d��o)���Y���Č��I(y��)֪�R����(y��n)֔(j��n)?sh��)��ΌW(xu��)�B(t��i)�ȣ������Ĺ������L(f��ng)���d�˲���ĸ��Ў��£���(y��n)���ɼ������Դ��˵ij���L(f��ng)�����㌍(sh��)�o�A��ƽ���˵��˸���������Ӱ����h(yu��n)�����ęn���x�}����ɣ�ÿһ�������ڌ�(d��o)����ָ��(d��o)����ɵģ��Aע�ˌ�(d��o)����������Ѫ���ڴˣ�֔(j��n)��?q��)�����ʾ��ߵľ�������ĵĸ��x�����ęn�������ɣ��x���_��λ�ώ���ͬ�W(xu��)�����ѵ��P(gu��n)�ĺ͎������ڴ˱�ʾ����ĸ��x��
���ߣ�
2011 �� 06 �� 15 ��
�����īI(xi��n)
[1]���,��ϲԪ,���^��.��Ƭ�C(j��)ԭ������(y��ng)��[M].����:�ߵȽ���������,2003.
[2]�����,���s.Һλ�y��������ϵ�y(t��ng)���O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)[J].Ӌ(j��)��C(j��)�y���c����,2009,17(11):2131-2133.
[3]������,�ēP(y��ng),����.�Կ��_��������Һλ�����е��о�[J].Ӌ(j��)��C(j��)����,2009,26(10):190-193.
[4]犕ԏ�(qi��ng).���چ�Ƭ�C(j��)��(sh��)�F(xi��n)��Һλ�������O(sh��)Ӌ(j��)[J].�F(xi��n)����Ӽ��g(sh��),2009,32(2):51-53.
[5]����.һ�N���چ�Ƭ�C(j��)��ˮλ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J].�x���x���Ñ�,2007,14(4):44-45.
[6]�ϼ,��С܊.���چ�Ƭ�C(j��)��Һλ�O(ji��n)��ϵ�y(t��ng)[J].��h������W(xu��)�W(xu��)��(b��o),2007,29(3):3-5.
[7]��²�,���f��,���鸶.��Ƭ�C(j��)��ˮλ�����еđ�(y��ng)��[J].�Ї��Ƽ���Ϣ,2006��(24):89-90,94.
[8]�K����,������.����RS-485�����Ĕ�(sh��)��(j��)�ɼ�ϵ�y(t��ng)[J].�x�����g(sh��)�c������,2007,(12).
[9]������.����Lab VIEW��Һλ�O(ji��n)��ϵ�y(t��ng)[D].�����I:�����I���I(y��)��W(xu��),2007.
[10]���P�m.Һλ�y���c�O(ji��n)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)[D].����:�������I(y��)��W(xu��),2010.
[11]���_��,Ϳ���c.20��NҺλ�y����������[J].���I(y��)�x���c�Ԅ�(d��ng)���b��,2003,(5):12-16.
[12]��܊,��.����AVR��Ƭ�C(j��)��Һ��y���O(ji��n)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)[J].�Ї��t(y��)���O(sh��)��,2009,24(12):27-30.
[13]��ϣ�.��Ƭ��Ӌ(j��)��C(j��)Һλ�y��ϵ�y(t��ng)�O(sh��)Ӌ(j��)[J].��ꖎ����W(xu��)Ժ�W(xu��)��(b��o),2005(2):71-73.
[14]�ϻ������Ҿ���.�·�O(sh��)Ӌ(j��)�c�ư�:Protel 99SE���T�c���[M].����:�����]늳�����,2007.
[15]��܊.�������c�z�y���g(sh��)[M].����:������ӿƼ���W(xu��)������,2003.
[16]������(qu��n).��Ƭ�C(j��)�ڿ���ϵ�y(t��ng)�Б�(y��ng)��[M].����:��ӹ��I(y��)������,2003.
[17]���H,�O����.��Ƭ�C(j��)C�Z�����T[M].����:�����]늳�����,2008.
[18]Ҧ��|,����.��݂�������Һλ�y���еđ�(y��ng)��[J].����������,2000,(9):4-7.
[19] Maurice Wilkes. Progress in Computers [J]. IEEE Trans on PE, Feb 2004,Vol.3(NO.6):470-472.
[20] Jae Hyeong Seo, Cang Ho Choi. A new simplified Space-Vector PWM Method for Three-level-Inverters [J].IEEE Trans on PE, July 2001,Vol.16(NO.4):545-550.
�� �Aϵ�y(t��ng)�·ԭ��D
�� � B�����īI(xi��n)���g��
Progress in Computers
Prestige Lecture delivered to IEE, Cambridge, on 5 February 2004
Maurice Wilkes
Computer Laboratory
University of Cambridge
The first stored program computers began to work around 1950. The one we built in Cambridge, the EDSAC was first used in the summer of 1949.
These early experimental computers were built by people like myself with varying backgrounds. We all had extensive experience in electronic engineering and were confident that that experience would stand us in good stead. This proved true, although we had some new things to learn. The most important of these was that transients must be treated correctly; what would cause a harmless flash on the screen of a television set could lead to a serious error in a computer.
As far as computing circuits were concerned, we found ourselves with an embarass de richess. For example, we could use vacuum tube diodes for gates as we did in the EDSAC or pentodes with control signals on both grids, a system widely used elsewhere. This sort of choice persisted and the term families of logic came into use. Those who have worked in the computer field will remember TTL, ECL and CMOS. Of these, CMOS has now become dominant.
In those early years, the IEE was still dominated by power engineering and we had to fight a number of major battles in order to get radio engineering along with the rapidly developing subject of electronics.dubbed in the IEE light current electrical engineering.properly recognised as an activity in its own right. I remember that we had some difficulty in organising a conference because the power engineers�� ways of doing things were not our ways. A minor source of irritation was that all IEE published papers were expected to start with a lengthy statement of earlier practice, something difficult to do when there was no earlier practice
Consolidation in the 1960s
By the late 50s or early 1960s, the heroic pioneering stage was over and the computer field was starting up in real earnest. The number of computers in the world had increased and they were much more reliable than the very early ones . To those years we can ascribe the first steps in high level languages and the first operating systems. Experimental time-sharing was beginning, and ultimately computer graphics was to come along.
Above all, transistors began to replace vacuum tubes. This change presented a formidable challenge to the engineers of the day. They had to forget what they knew about circuits and start again. It can only be said that they measured up superbly well to the challenge and that the change could not have gone more smoothly.
Soon it was found possible to put more than one transistor on the same bit of silicon, and this was the beginning of integrated circuits. As time went on, a sufficient level of integration was reached for one chip to accommodate enough transistors for a small number of gates or flip flops. This led to a range of chips known as the 7400 series. The gates and flip flops were independent of one another and each had its own pins. They could be connected by off-chip wiring to make a computer or anything else.
These chips made a new kind of computer possible. It was called a minicomputer. It was something less that a mainframe, but still very powerful, and much more affordable. Instead of having one expensive mainframe for the whole organisation, a business or a university was able to have a minicomputer for each major department.
Before long minicomputers began to spread and become more powerful. The world was hungry for computing power and it had been very frustrating for industry not to be able to supply it on the scale required and at a reasonable cost. Minicomputers transformed the situation.
The single-chip computer
At each shrinkage the number of chips was reduced and there were fewer wires going from one chip to another. This led to an additional increment in overall speed, since the transmission of signals from one chip to another takes a long time.
Eventually, shrinkage proceeded to the point at which the whole processor except for the caches could be put on one chip. This enabled a workstation to be built that out-performed the fastest minicomputer of the day, and the result was to kill the minicomputer stone dead. As we all know, this had severe consequences for the computer industry and for the people working in it.
From the above time the high density CMOS silicon chip was Cock of the Roost. Shrinkage went on until millions of transistors could be put on a single chip and the speed went up in proportion.
Processor designers began to experiment with new architectural features designed to give extra speed. One very successful experiment concerned methods for predicting the way program branches would go. It was a surprise to me how successful this was. It led to a significant speeding up of program execution and other forms of prediction followed
Equally surprising is what it has been found possible to put on a single chip computer by way of advanced features. For example, features that had been developed for the IBM Model 91.the giant computer at the top of the System 360 range.are now to be found on microcomputers
Murphy��s Law remained in a state of suspension. No longer did it make sense to build experimental computers out of chips with a small scale of integration, such as that provided by the 7400 series. People who wanted to do hardware research at the circuit level had no option but to design chips and seek for ways to get them made. For a time, this was possible, if not easy
Unfortunately, there has since been a dramatic increase in the cost of making chips, mainly because of the increased cost of making masks for lithography, a photographic process used in the manufacture of chips. It has, in consequence, again become very difficult to finance the making of research chips, and this is a currently cause for some concern.
The Semiconductor Road Map
The extensive research and development work underlying the above advances has been made possible by a remarkable cooperative effort on the part of the international semiconductor industry.
At one time US monopoly laws would probably have made it illegal for US companies to participate in such an effort. However about 1980 significant and far reaching changes took place in the laws. The concept of pre-competitive research was introduced. Companies can now collaborate at the pre-competitive stage and later go on to develop products of their own in the regular competitive manner.
The agent by which the pre-competitive research in the semi-conductor industry is managed is known as the Semiconductor Industry Association (SIA). This has been active as a US organisation since 1992 and it became international in 1998. Membership is open to any organisation that can contribute to the research effort.
Every two years SIA produces a new version of a document known as the International Technological Roadmap for Semiconductors (ITRS), with an update in the intermediate years. The first volume bearing the title ��Roadmap�� was issued in 1994 but two reports, written in 1992 and distributed in 1993, are regarded as the true beginning of the series.
Successive roadmaps aim at providing the best available industrial consensus on the way that the industry should move forward. They set out in great detail.over a 15 year horizon. the targets that must be achieved if the number of components on a chip is to be doubled every eighteen months.that is, if Moore��s law is to be maintained.-and if the cost per chip is to fall.
In the case of some items, the way ahead is clear. In others, manufacturing problems are foreseen and solutions to them are known, although not yet fully worked out; these areas are coloured yellow in the tables. Areas for which problems are foreseen, but for which no manufacturable solutions are known, are coloured red. Red areas are referred to as Red Brick Walls.
The targets set out in the Roadmaps have proved realistic as well as challenging, and the progress of the industry as a whole has followed the Roadmaps closely. This is a remarkable achievement and it may be said that the merits of cooperation and competition have been combined in an admirable manner.
It is to be noted that the major strategic decisions affecting the progress of the industry have been taken at the pre-competitive level in relative openness, rather than behind closed doors. These include the progression to larger wafers.
By 1995, I had begun to wonder exactly what would happen when the inevitable point was reached at which it became impossible to make transistors any smaller. My enquiries led me to visit ARPA headquarters in Washington DC, where I was given a copy of the recently produced Roadmap for 1994. This made it plain that serious problems would arise when a feature size of 100 nm was reached, an event projected to happen in 2007, with 70 nm following in 2010. The year for which the coming of 100 nm (or rather 90 nm) was projected was in later Roadmaps moved forward to 2004 and in the event the industry got there a little sooner.
I presented the above information from the 1994 Roadmap, along with such other information that I could obtain, in a lecture to the IEE in London, entitled The CMOS end-point and related topics in Computing and delivered on 8 February 1996.
The idea that I then had was that the end would be a direct consequence of the number of electrons available to represent a one being reduced from thousands to a few hundred. At this point statistical fluctuations would become troublesome, and thereafter the circuits would either fail to work, or if they did work would not be any faster. In fact the physical limitations that are now beginning to make themselves felt do not arise through shortage of electrons, but because the insulating layers on the chip have become so thin that leakage due to quantum mechanical tunnelling has become troublesome.
There are many problems facing the chip manufacturer other than those that arise from fundamental physics, especially problems with lithography. In an update to the 2001 Roadmap published in 2002, it was stated that the continuation of progress at present rate will be at risk as we approach 2005 when the roadmap projects that progress will stall without research break-throughs in most technical areas ��. This was the most specific statement about the Red Brick Wall, that had so far come from the SIA and it was a strong one. The 2003 Roadmap reinforces this statement by showing many areas marked red, indicating the existence of problems for which no manufacturable solutions are known.
It is satisfactory to report that, so far, timely solutions have been found to all the problems encountered. The Roadmap is a remarkable document and, for all its frankness about the problems looming above, it radiates immense confidence. Prevailing opinion reflects that confidence and there is a general expectation that, by one means or another, shrinkage will continue, perhaps down to 45 nm or even less.
However, costs will rise steeply and at an increasing rate. It is cost that will ultimately be seen as the reason for calling a halt. The exact point at which an industrial consensus is reached that the escalating costs can no longer be met will depend on the general economic climate as well as on the financial strength of the semiconductor industry itself.��
Insulating layers in the most advanced chips are now approaching a thickness equal to that of 5 atoms. Beyond finding better insulating materials, and that cannot take us very far, there is nothing we can do about this. We may also expect to face problems with on-chip wiring as wire cross sections get smaller. These will concern heat dissipation and atom migration. The above problems are very fundamental. If we cannot make wires and insulators, we cannot make a computer, whatever improvements there may be in the CMOS process or improvements in semiconductor materials. It is no good hoping that some new process or material might restart the merry-go-round of the density of transistors doubling every eighteen months.
I said above that there is a general expectation that shrinkage would continue by one means or another to 45 nm or even less. What I had in mind was that at some point further scaling of CMOS as we know it will become impracticable, and the industry will need to look beyond it.
Since 2001 the Roadmap has had a section entitled emerging research devices on non-conventional forms of CMOS and the like. Vigorous and opportunist exploitation of these possibilities will undoubtedly take us a useful way further along the road, but the Roadmap rightly distinguishes such progress from the traditional scaling of conventional CMOS that we have been used to.
Advances in Memory Technology
Unconventional CMOS could revolutionalize memory technology. Up to now, we have relied on DRAMs for main memory. Unfortunately, these are only increasing in speed marginally as shrinkage continues, whereas processor chips and their associated cache memory continue to double in speed every two years. The result is a growing gap in speed between the processor and the main memory. This is the memory gap and is a current source of anxiety. A breakthrough in memory technology, possibly using some form of unconventional CMOS, could lead to a major advance in overall performance on problems with large memory requirements, that is, problems which fail to fit into the cache.
Perhaps this, rather than attaining marginally higher basis processor speed will be the ultimate role for non-conventional CMOS.
Shortage of Electrons
Although shortage of electrons has not so far appeared as an obvious limitation, in the long term it may become so. Perhaps this is where the exploitation of non-conventional CMOS will lead us. However, some interesting work has been done.notably by Haroon Amed and his team working in the Cavendish Laboratory.on the direct development of structures in which a single electron more or less makes the difference between a zero and a one. However very little progress has been made towards practical devices that could lead to the construction of a computer. Even with exceptionally good luck, many tens of years must inevitably elapse before a working computer based on single electron effects can be contemplated.
�C(j��)�l(f��)չ��ʷ
IEEE���ęn �����W(xu��)��2004/2/5
Ī��˹ ������˹
Ӌ(j��)��C(j��)��(sh��)�(y��n)��
�����W(xu��)
��һ�_�惦(ch��)�����Ӌ(j��)���_ʼ���F(xi��n)��1950ǰ��������1949�������ڄ����W(xu��)���҂���(chu��ng)������t�惦(ch��)�Ԅ�(d��ng)���Ӌ(j��)��C(j��)��EDSAC����
�����(sh��)�(y��n)�õ�Ӌ(j��)��C(j��)��������һ�������V��֪�R���˘�(g��u)��ġ��҂�����ӹ��̷��涼�����S���Ľ�(j��ng)�(y��n)�������҂������@Щ��(j��ng)�(y��n)���҂��������档��������C�������_�ģ��M���҂�ҲҪ�W(xu��)��(x��)�ܶ��|��������Ҫ����˲�B(t��i)һ��ҪС�đ�(y��ng)�����mȻ��ֻ��(hu��)���ҕ�C(j��)�ğ�Ļ��һ��һ��(g��)�o�����W�⣬������Ӌ(j��)��C(j��)���@����(d��o)��һϵ�е��e(cu��)�`��
���·���O(sh��)Ӌ(j��)�^���У��҂���(j��ng)��������y�ľ��ء��e�����f���ҿ���ʹ����ն����������T�·��������EDSAC��һ�ӣ������ڃɂ�(g��)�Ÿ�֮�g�Î�������̖���弉�ܣ��@���V����������ϵ�y(t��ng)�O(sh��)Ӌ(j��)���@��x��һֱ�ڳ��m(x��)��ֱ��߉�T�·�_ʼ��(y��ng)�á���Ӌ(j��)��C(j��)�I(l��ng)�������˶���(y��ng)ԓӛ��TTL��ECL��CMOS����Ŀǰ��ֹ��CMOS�ѽ�(j��ng)ռ��(j��)������(d��o)��λ��
������Ď��꣬IEE����ӹ��̎��f(xi��)��(hu��)����Ȼ�Ʉ�(d��ng)������ռ��(j��)����(d��o)��λ������IEE �J(r��n)�R���o�����̺Ϳ��ٰl(f��)չ����ӹ��̲��аl(f��)չ�����Լ���һ�(xi��ng)��(qu��n)�����҂����ò��挦һЩ�ϵK�����ڄ�(d��ng)�����̎������µķ�ʽ�c�҂���ͬ���҂�Ҳ�������S�����y������Щ��ŭ���ǣ����е�IEE������ęn�������������L�������о�������_�^���o����Щ�������A�����ڛ]��̫�ཛ(j��ng)�(y��n)�����������y֮������
60�����얹��A��
60���������(g��)��Ӣ�ەr(sh��)���Y(ji��)���ˣ�Ӌ(j��)��C(j��)������������ҕ�������ϵ�Ӌ(j��)��C(j��)��(sh��)���ѽ�(j��ng)�������S�࣬�������ܱ���ǰ���ӿɿ����@Щ���J(r��n)��w���c���Z�Ե��͵�һ��(g��)����ϵ�y(t��ng)���Q�����֕r(sh��)ϵ�y(t��ng)�_ʼ������Ӌ(j��)��C(j��)�D�ΌW(xu��)�S֮������
�C�����������w���_ʼ�������չܡ��@��(g��)׃������(d��ng)�r(sh��)�Ĺ��̎����ǂ�(g��)���ɻرܵ�����(zh��n)�����������ӛ������Ϥ���·�����_ʼ��ֻ���f�������������������(zh��n)���M���@��(g��)�D(zhu��n)׃������(hu��)һ���L(f��ng)혡�
СҎ(gu��)ģ�����·��С�͙C(j��)
�ܿ죬��һ��(g��)��Ƭ�Ͽ��ԷŲ�ֹһ��(g��)���w�ܣ��ɴ˼����·�Q���ˡ��S���r(sh��)�g�����ƣ�һ��(g��)Ƭ���܉��ݼ{�����(sh��)���ľ��w�ܻ�����Щ��߉�T�ͷ��D(zhu��n)�T���ɶ��_(d��)����һ��(g��)����ȡ��ɴ˳��F(xi��n)���҂���֪��7400ϵ���C(j��)��ÿ��(g��)�T�·���D(zhu��n)�·�����(d��)���IJ������Լ������_��������ͨ�^��(d��o)���B����һ������һ��(g��)Ӌ(j��)��C(j��)�������Ė|����
�@ЩоƬ������һ�N�µ�Ӌ(j��)��C(j��)�ṩ�˿��ܡ������Q��С�͙C(j��)�����ȴ��͙C(j��)���d��������(qi��ng)���Ҹ�����ؓ(f��)��(d��n)����һ��(g��)�̘I(y��)���T���W(xu��)����������һ�_С�͙C(j��)�����ǵõ�һ�_���ͽM�����谺�F�Ĵ��͙C(j��)��
�S���C(j��)���_ʼ���в��ҹ��ܵ����ƣ����缱�Ы@������Ӌ(j��)���������������ڹ��I(y��)�ϲ���Ҏ(gu��)ģ����(y��ng)�������^�ăr(ji��)����ܵ����ۡ��C(j��)�ij��F(xi��n)��Q���@��(g��)���档
��Ƭ�C(j��)
оƬÿ�εĿsС��оƬ��(sh��)�����p�٣�����оƬ�g�Č�(d��o)��Ҳ�S֮�p�١��@��(d��o)�������w�ٶȵ��½�����?y��n)���̖�ڸ���(g��)оƬ�g�Ă�ݔ�r(sh��)�g׃�L�ˡ�
�u�u�أ�оƬ���տs��ֻʣ��̎�������֣����涼��������һ��(g��)�Ϊ�(d��)��Ƭ���ϡ��@ʹ�ù���վ�����ɓ��Ю�(d��ng)��С�͙C(j��)һ�ӵ����ܣ��Y(ji��)���ᵹ��С�͙C(j��)�^���Ļ�ʯ�������҂���֪���ģ��@����Ӌ(j��)��C(j��)���I(y��)�͏���Ӌ(j��)��C(j��)�I(y��)���ˮa(ch��n)�������h(yu��n)��Ӱ�
�ԏ������r(sh��)�����_ʼ�����ܶ�CMOS��оƬ�ɞ�����(d��o)���S��оƬ�ĿsС���g(sh��)�İl(f��)չ����(sh��)���f�ľ��w�ܿ��Է���һ��(g��)�Ϊ�(d��)��Ƭ���ϣ�����(y��ng)���ٶ�Ҳ�ɱ��������ӡ�
���˵õ��~����ٶȡ�̎�����O(sh��)Ӌ(j��)���_ʼ���µ��wϵ��(g��u)���M(j��n)�Ќ�(sh��)�(y��n)��һ�γɹ��Č�(sh��)�(y��n)���A(y��)����һ�N�µľ��̷�ʽ�ķ�֧���Q�����Ҍ���ȡ�õijɹ��е��dz��@�档����(d��o)���˳����(zh��)���ٶȵ����Ӳ���������(y��ng)�Ŀ�ܡ�
ͬ�������@����ǣ�ͨ�^���������Խ���һ�N��Ƭ�C(j��)���п��ܵġ����磬��IBM Model 91�_�l(f��)�������ԣ��F(xi��n)���چ�Ƭ�C(j��)��Ҳ���F(xi��n)�ˡ�
Murphy������Ȼ����ֹ�Ġ�B(t��i)���������m����ʹ��СҎ(gu��)ģ����оƬ�O(sh��)Ӌ(j��)��(sh��)�(y��n)�õ�Ӌ(j��)��C(j��)������7400ϵ�С������·������Ӳ���о����˂��]�Єe���x������O(sh��)Ӌ(j��)оƬ�����ҵ���(sh��)�F(xi��n)�����k����һ�Εr(sh��)�g��(n��i)���@���ǿ��ܵģ����Dz������ס�
���ҵ��ǣ�����оƬ�Ļ��M(f��i)���ˑ��Ե����L����Ҫԭ��������оƬ�^�����·ӡˢ�������ɱ������ӡ���ˣ�������оƬ���g(sh��)���Y��׃��ʮ�����y���@�Ǯ�(d��ng)ǰ�����˂��P(gu��n)ע��ԭ��
�댧(d��o)�wǰ��Ҏ(gu��)��
���������ᵽ�ĸ���(g��)���棬�ڲ��և��H�댧(d��o)�w���I(y��)���T�ľ��\�����£��V�����о��c�_�l(f��)�����ǿ��еġ�
����ǰ�������Ŕ෨��ֹ�@�N�О顣������1980�꣬ԓ���ɰl(f��)���˺ܴ�׃�����A(y��)����������M(j��n)��ԓ���ɡ�����(g��)��˾�F(xi��n)�ڿ������A(y��)�Ը����A��չ�_������Ȼ����Ҏ(gu��)�t���S����r���^�m(x��)�_�l(f��)���ԵĮa(ch��n)Ʒ��
�ڰ댧(d��o)�w���I(y��)�У��A(y��)�����о��Ĺ���C(j��)��(g��u)�ǰ댧(d��o)�w���I(y��)�f(xi��)��(hu��)��1972��������������(n��i)�ĽM����1998��ɞ�һ��(g��)�����ԵĽM�����κ�һ��(g��)�о��M�����ɼ���ԓ�f(xi��)��(hu��)��
ÿ���꣬SIA��ӆһ��ITRS�����H�댧(d��o)�w�ƌW(xu��)Ҏ(gu��)����������������¡�1994���ڵ�һ���������ˡ�ǰ��Ҏ(gu��)����һ�~��ԓ���Ƀɂ�(g��)�ęn�M�ɣ�����1992�꣬��1993���ύ�������J(r��n)����ԓҎ(gu��)���������_ʼ��
�����Ƅ�(d��ng)�댧(d��o)�w���I(y��)����ǰ�l(f��)չ�����m(x��)��Ҏ(gu��)���ṩ��õĿ����õĹ��I(y��)��(bi��o)��(zh��n)����������15���(n��i)�İl(f��)չ������Ԕ��(x��)��Ҏ(gu��)����Ҫ�_(d��)����Ŀ��(bi��o)��ÿ18��(g��)�¾��w�ܵļ��ɶ�����һ����ͬ�r(sh��)ÿ�KоƬ�ăr(ji��)���½�һ�룬��Moore���ɡ�
����ijЩ���棬ǰ��ĵ�·������ġ�����һ���棬����I(y��)�Ć��}�ǿ����A(y��)Ҋ�IJ��ҽ�Q���k��Ҳ�ǿ���֪���ģ��M�ܲ������еĆ��}���܉��Q���@�ӵ��I(l��ng)���ڱ��������{(l��n)ɫ��ʾ��ͬ�r(sh��)�]�н�Q�k���ģ����Լtɫ���tɫ�^(q��)�������Q��tɫ�u����
Ҏ(gu��)��������Ŀ��(bi��o)�ǬF(xi��n)��(sh��)�ģ�ͬ�r(sh��)Ҳ�dz�M����(zh��n)�ġ��댧(d��o)�w���I(y��)���w�ϵ��M(j��n)����ԓҎ(gu��)���ܲ��ɷ֡��@�ǂ�(g��)�����@Ӡ�ijɾͣ��������f�Ǻ���������ͬ�ăr(ji��)ֵ��
ֵ��ע����ǣ����M(j��n)�댧(d��o)�w���I(y��)��ǰ�l(f��)չ����Ҫ�đ�(zh��n)�ԛQ���������_�ŵ��A(y��)�����C(j��)�ƣ��������]�P(gu��n)�i�����@Ҳ������Ҏ(gu��)ģ�A��Ƭȡ���M(j��n)չ��ԭ��
1995��ǰ�����_ʼ���X��������_(d��)���˲�����ʹ�þ��w���w�e��С���R���c(di��n)�r(sh��)�����l(f��)��ʲô�������@�ӵ��ɻ����L����λ���Aʢ�D��ARPA��������������ָ�]���������ǣ��ҿ���1994��Ҏ(gu��)���ď�(f��)�����һ�Ȼ����(d��ng)�A��Ƭ�ߴ���2007���_(d��)��100�{�וr(sh��)�������F(xi��n)��(y��n)�صĆ��}����2010���_(d��)��70�{�וr(sh��)Ҳ��ˡ����S���2004���Ҏ(gu��)���У���(d��ng)�A��Ƭ�ߴ��_(d��)��100�{�וr(sh��)��Ҳ��������(y��ng)��Ҏ(gu��)�������ð댧(d��o)�w���I(y��)���l(f��)չ����һ����
��1994���Ҏ(gu��)���������������ϵ���Ϣ��߀�о���һƪ�ύ��IEE���(xi��ng)Ŀ��CMOS�K�Y(ji��)�c(di��n)���ęn����1996��2��8̖��Computing��ӑՓ��һЩ�(xi��ng)Ŀ��
�ҬF(xi��n)�ڵ��뷨�ǣ���K�ĽY(ji��)���DZ�ʾһ��(g��)���ڿ��õ���Ӕ�(sh��)Ŀ�Ĕ�(sh��)ǧ�p�ٵ���(sh��)�١����@�ӵ���r�£��y(t��ng)Ӌ(j��)����(d��ng)���ɞ醖�}������·���߲��ٹ����������_(d��)�����ٶȵĘO�ޡ���(sh��)�ϣ��������ƌ��_ʼ�������X������ͻ�������K�IJ��㣬ԭ����оƬ�Ͻ^����Խ��Խ��������������Փ������Ч��(y��ng)�������韩����(d��o)���˝B©��
�������A(ch��)����W(xu��)��оƬ�������挦�Ć��}Ҫ����S�࣬�������·ӡˢ�g(sh��)���������y��2001�����2002������Ҏ(gu��)���У�������@��һ�N��r����Ŀǰ�İl(f��)չ�ٶȣ������2005��ǰ���P(gu��n)�I���g(sh��)�I(l��ng)��]��ȡ�ô��ͻ�Ƶ�Ԓ���댧(d��o)�w�I(y��)��ֹͣ��ǰ���@�nj����tɫ�u�������(zh��n)�_����������Ŀǰ��ֹ��SIA���������韩�Ć��}��2003���Ҏ(gu��)������(qi��ng)�{(di��o)���@һ�c(di��n)��ͨ�^���S��ط������˼tɫ��ָʾ���@Щ�I(l��ng)���Դ����˂��]�н�Q�����췽�����}��
��Ŀǰ��ֹ�����ԺܝM��Ĉ�(b��o)�����������Ć��}�����r(sh��)�ҵ��˽�Q֮����Ҏ(gu��)�����ǂ�(g��)�Ƿ����ęn��������̹���������ᵽ�Ć��}������ʾ���˟o�����ġ���Ҫ��Ҋ�ⷴӳ�����@�N���IJ�����һ��(g��)���µ�������ͨ�^ij�N��ʽ���A���w��׃�ĸ�С��Ҳ�S��45�{���С��
Ȼ�������M(f��i)���Ժܴ���������L��Ҳ�S���ɞ�댧(d��o)�wͣ����ǰ����Kԭ���������ӵĻ��M(f��i)ֱ�����ܝM�㣬�@��(g��)���_�Ĺ��I(y��)���_(d��)��һ����Ҋ��ƽ���c(di��n)����ه�ڽ�(j��ng)��(j��)�����w�΄ݺͰ댧(d��o)�w���I(y��)������ؔ(c��i)����r��
���оƬ�Ľ^���Ӻ�ȃH��5��(g��)ԭ�ӵĴ�С�������ҵ����õĽ^�������⣬�҂����粽�y�С����ڴˣ��҂��]���κ��k�����҂�Ҳ���ò��挦оƬ�IJ������}����Խ��Խ��(x��)С�ˡ�߀��ɢ�ᆖ�}��ԭ���w�Ɔ��}���@Щ���}���ஔ(d��ng)���A(ch��)�Եġ�����҂�����������(d��o)���ͽ^���ӣ��҂��Ͳ�������һ�_Ӌ(j��)��C(j��)����Փ��CMOS�ӹ���ˇ�ϺͰ댧(d��o)�w������ȡ�ö�ô����M(j��n)�������eָ����ʲô�µĹ�ˇ����Ͽ���ʹ�ð댧(d��o)�w���ɶ�ÿ18��(g��)�·�һ�������Õr(sh��)���ˡ�
�����������f�����A���w�^�m(x��)�sСֱ��45�{���С�ǂ�(g��)���µ����������ҵ��^�X�У���ij�c(di��n)�ρ��f���҂���֪�����^�m(x��)�sСCMOS�Dz����еģ������I(y��)����Ҫ��Խ����
2001���ԁ���Ҏ(gu��)��������һ��������˷ǂ��y(t��ng)��ʽCMOS�����d�о��O(sh��)�䡣һЩ������ʢ���˺�һЩͶ�C(j��)�ߵ�̽���o�ɽo���҂�һЩ�����;��������Ҏ(gu��)�������_�ֱ�����@Щ�M(j��n)��������Щ�҂�����(j��ng)ʹ�õĂ��y(t��ng)CMOS���档
��(n��i)�漼�g(sh��)���M(j��n)��
�ǂ��y(t��ng)��CMOS׃���˴惦(ch��)�����g(sh��)��ֱ���F(xi��n)�ڣ��҂�?n��i)�Ȼ����DRAM������Ҫ�Ĵ惦(ch��)�w�����ҵ��ǣ��S��оƬ�ĿsС��ֻ��оƬ����ٶ��ϵ����L����̎����оƬ�������P(gu��n)�ľ����ٶ�ÿ��������һ�����@���Ǵ惦(ch��)�����ϲ������˂����]�ĸ�Դ���惦(ch��)���g(sh��)��һ��(g��)����ͻ���ǣ�ʹ��һ�N�ǂ��y(t��ng)��CMOS�ܣ���Ӌ(j��)��C(j��)���w�����ό���(d��o)��һ��(g��)�ܴ���M(j��n)��������Q��惦(ch��)�����������治�ܽ�Q�Ć��}��
Ҳ�S�@��(g��)������������·�_(d��)������̎�������ٶȌ��ɞ�ǂ��y(t��ng)CMOS.����K��ɫ��
��ӵIJ���
�M��Ŀǰ��ֹ�����ÿ���F(xi��n)�����@�IJ��㣬Ȼ�����L�h(yu��n)����������K��(hu��)���ܝM��Ҫ��Ҳ�S�@���҂��_�l(f��)�ǂ��y(t��ng)CMOS�ܵ�ԭ����Cavendish��(sh��)�(y��n)���Haroon Amed�ѽ�(j��ng)���˺ܶ������x�Ĺ�����������ͨ�^һ��(g��)�Ϊ�(d��)��ӻ����ٵı��F(xi��n)��0��1�ą^(q��)�e��Ȼ�����ژ�(g��u)�쌍(sh��)�õ�Ӌ(j��)��C(j��)�O(sh��)��ֻȡ����һ�c(di��n)�c(di��n)�M(j��n)չ��Ҳ�S����żȻ�ĺ��\(y��n)�⣬��(sh��)ʮ���һ�_����һ��(g��)�Ϊ�(d��)��ӵ�Ӌ(j��)��C(j��)Ҳ�S�ǿ��Ԍ�(sh��)�F(xi��n)�ġ�
���ψD�ĵ�Word��ʽ�ęn���d(��(n��i)�ݺͱ��W(w��ng)��ϵ�һģһ��,�����ұ���):
 ���چ�Ƭ�C(j��)��Һλ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)-��Ʒ.doc
(1.02 MB, ���d��(sh��): 56)
���چ�Ƭ�C(j��)��Һλ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)-��Ʒ.doc
(1.02 MB, ���d��(sh��): 56)
2018-5-19 18:13 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5





 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






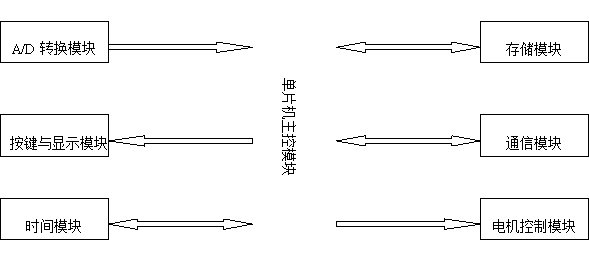
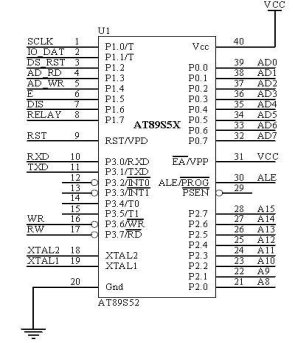
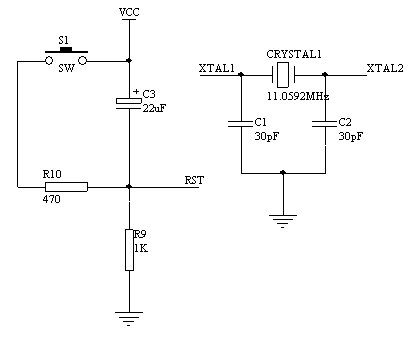
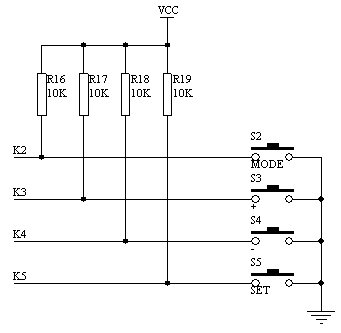
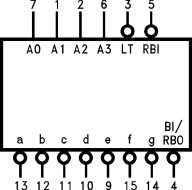
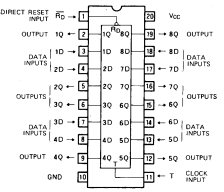
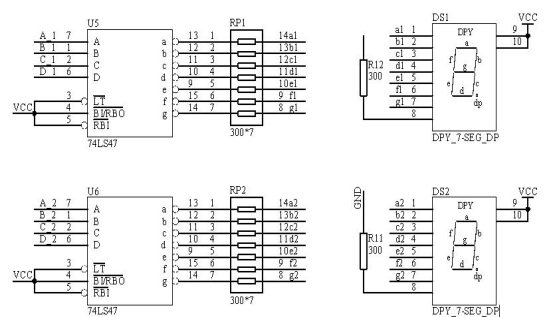
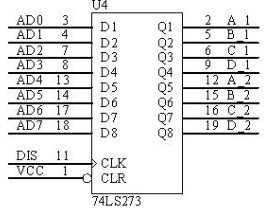
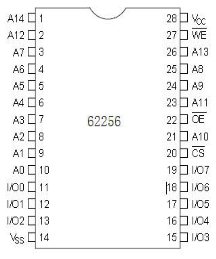
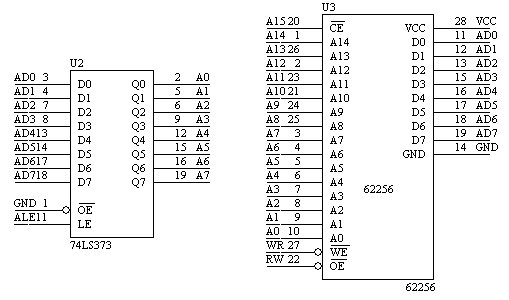
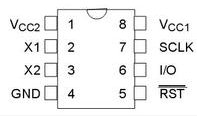
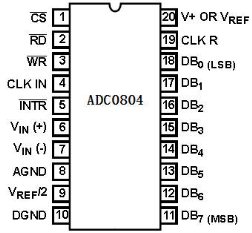
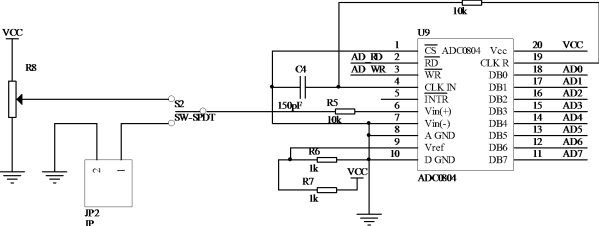
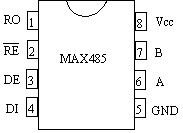
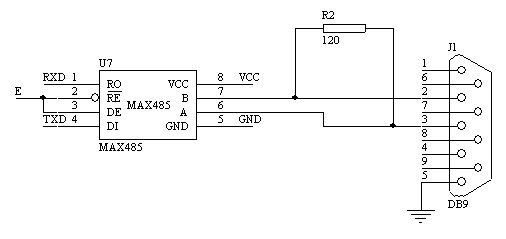
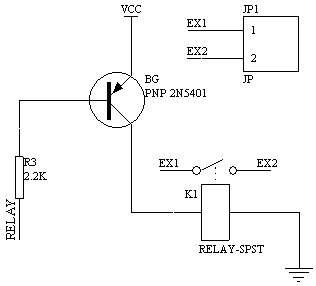
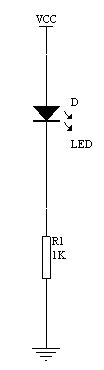
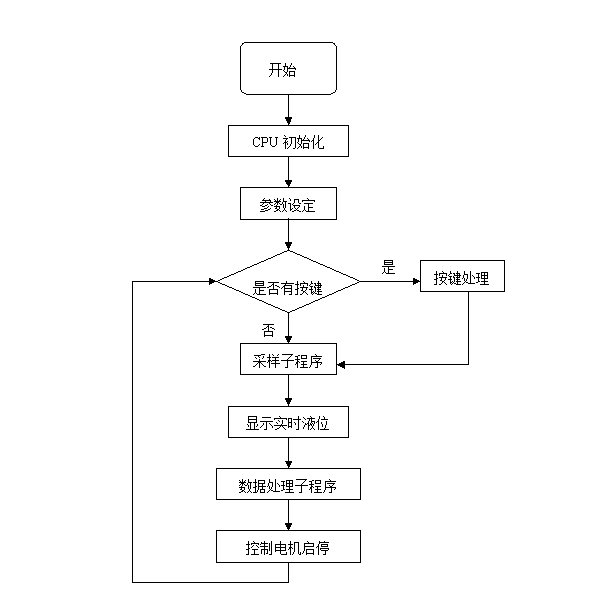


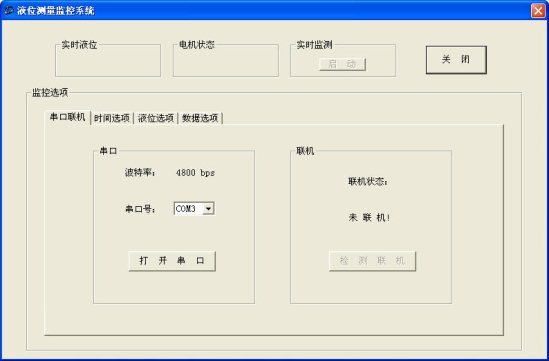

 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��