Ä═ę╗éĆ(g©©)«ģśI(y©©)╔·ū÷Ą─ĪČPIC16F877A╗∙ė┌PPMĄ─╝ż╣Ō═©ą┼ĪĘĘ┬šµĪŻ
▄ø╝■Ż║
MPLAB X IDE v4.15ŠÄūg proteus 8.6Ę┬šµ.
1ĪóĘ┬šµļŖ┬ĘłDŻ╗
2Īó░l(f©Ī)╦═║═Įė╩šį┤│╠ą“╝ėūóßīĪŻ
šł(q©½ng)┐┤ūóßīĪŻ
įŁ└ĒŻ║
1Ż®ADCūx╚Ī▓óė├led’@╩ŠADCūxöĄ(sh©┤)Ż¼▓ó═©▀^usart▀M(j©¼n)ąą▌ö│÷ĪŻ
2Ż®═©▀^PPMįŁ└Ē▀M(j©¼n)ąą═©ėŹé„▌ö?sh©┤)Į┴Ē═Ōę╗éĆ(g©©)å╬Ų¼ÖC(j©®)Ż¼LED’@╩ŠĮė╩šĄ─ųĄĪŻ
Š▀¾wšł(q©½ng)┐┤ĖĮ╝■
ŽŻ═¹┤¾╝ęĒöę╗Ž┬ĪŻ
Ę┬šµįŁ└ĒłD╚ńŽ┬Ż©proteusĘ┬šµ╣ż│╠╬─╝■┐╔ĄĮ▒Š╠¹ĖĮ╝■ųąŽ┬▌dŻ®

łDŲ¼.jpg (247.76 KB, Ž┬▌d┤╬öĄ(sh©┤): 158)
Ž┬▌dĖĮ╝■
įŁ└Ē║═Ę┬šµ
2018-6-14 15:54 ╔Žé„
1Īó░l(f©Ī)╦═─ŻēKŻ║ūx╚ĪADCöĄ(sh©┤)ųĄŻ¼LED’@╩Š10╬╗ADCųĄĪŻ▓ó═©▀^PPM░l(f©Ī)╦═ĪŻ
2ĪóĮė╩š─ŻēKŻ║PPMĮė╩šĄĮĄ─öĄ(sh©┤)ō■(j©┤)ĪŻLED’@╩ŠĮė╩šĄ─ADCųĄŻ©10bitsŻ®
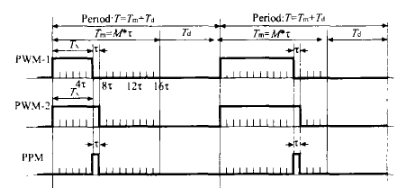
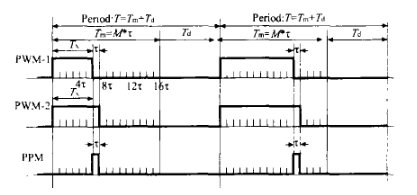
╗∙ė┌PICå╬Ų¼ÖC(j©®)Ą─PPMš{(di©żo)ųŲ╝ż╣Ō═©ą┼╩š░l(f©Ī)Ų„ PPM (pulse position modulation) ├}ø_╬╗ų├š{(di©żo)ųŲĪŻ - ═©▀^Ė─ūā├}ø_Ą─╬╗ų├üĒé„▌ö▓╗═¼Ą─öĄ(sh©┤)ō■(j©┤)ĪŻ
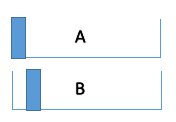
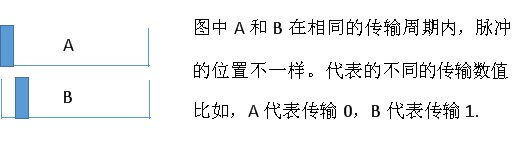 ╚ńłD1Īó ╚ńłD1Īó ╚ńłDĪó└¹ė├å╬Ų¼ÖC(j©®)Ą─PWM╣”─▄«a(ch©Żn)╔·PWM1║═PWM2▀BéĆ(g©©)├}ø_ĪŻ └¹ė├öĄ(sh©┤)ūųļŖ┬Ę║Ž│╔PPM├}ø_ĪŻ ┐╔ęį┐┤│÷«ö(d©Īng)PWM1Ą─š╝┐š▒╚╩Ū0Ģr(sh©¬)Ż¼PPM╚ńŽ┬łDĄ─AŻ¼ PWM1Ą─š╝┐š▒╚╩Ū1Ģr(sh©¬)Ż¼PPM╚ńŽ┬łDĄ─BŻ¼
╚ńĄ┌ę╗éĆ(g©©)łD┐╔ų¬Ż¼PPM┐╔ęįīóPPM1Ū¾Ę┤║¾║═PWM2ŽÓ┼cĄ├ĄĮĪŻ ╣╩įO(sh©©)ėŗ(j©¼)╚ń╔Ž░l(f©Ī)╦═─ŻēKĪŻĮė╩š─ŻēKĮY(ji©”)╣¹▓©ą╬š¹ą╬╦═ĄĮå╬Ų¼ÖC(j©®)╠Ä└ĒĪŻ - PPM░l(f©Ī)╦═Ą─öĄ(sh©┤)ō■(j©┤)Ż©16╬╗Ą─ļpūų╣Ø(ji©”)öĄ(sh©┤)Ż®ĪŻ
Č©┴xš╝┐š▒╚ę╗Č©Ą─├}ø_×ķ░l(f©Ī)╦═Ą─öĄ(sh©┤)ō■(j©┤)ĪŻ ░l(f©Ī)╦═0, 0, 0, 0-3Ż¼ 4-7, 8-11Ż¼ 12-15 Ū░├µ╩ŪŅ^Ż¼┐╔ęį╠ß╣®Įė╩šPPMĄ─å╬éĆ(g©©)ų▄Ų┌ĪŻ 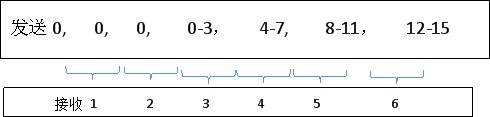 PPMĮė╩šĄĮĄ─öĄ(sh©┤)ō■(j©┤)╩ŪŻ║ PPMĮė╩šĄĮĄ─öĄ(sh©┤)ō■(j©┤)╩ŪŻ║ ė╔łDųąų¬Ą└ - ▓╗ė├Ż¼ū„×ķåóäė(d©░ng)Įė╩šĪŻ
- Š═╩Ū▓©ą╬Ą─ų▄Ų┌
Ż©3-2Ż®╝┤3£y(c©©)┴┐Ą─īÆČ╚£p╚ź▓©ą╬Ą─ų▄Ų┌Ą─Ą╚ė┌0-3ī”(du©¼)æ¬(y©®ng)Ą─PWM├}īÆ1 Ż©4+├}īÆ1-2Ż®╝┤4£y(c©©)┴┐Ą─īÆČ╚╝ė╔Ž├}īÆ1£p╚ź▓©ą╬Ą─ų▄Ų┌Ą─Ą╚ė┌4-7ī”(du©¼)æ¬(y©®ng)Ą─PWM├}īÆ2 Ż©5+├}īÆ2-2Ż®╝┤5£y(c©©)┴┐Ą─īÆČ╚╝ė╔Ž├}īÆ2£p╚ź▓©ą╬Ą─ų▄Ų┌Ą─Ą╚ė┌8-11ī”(du©¼)æ¬(y©®ng)Ą─PWM├}īÆ3 Ż©6+├}īÆ3-2Ż®╝┤6£y(c©©)┴┐Ą─īÆČ╚╝ė╔Ž├}īÆ3£p╚ź▓©ą╬Ą─ų▄Ų┌Ą─Ą╚ė┌12-15ī”(du©¼)æ¬(y©®ng)Ą─PWM├}īÆ4 į┌īó╦─éĆ(g©©)░ļūų╣Ø(ji©”)öĄ(sh©┤)║Ž│╔2éĆ(g©©)ūų╣Ø(ji©”)16╬╗Ą─ųĄĪŻ
å╬Ų¼ÖC(j©®)į┤│╠ą“╚ńŽ┬:
- #include "sys.h"
- #include <stdint.h> /* For uint8_t definition */
- #include <stdbool.h> /* For true/false definition */
- #include <stdio.h>
- #define AKING PORTCbits.RC0
- const uint8_t uart_disp1[]={"ADC result(DEC) is:"}; //uart DISP
- void usart_send_8bits(uint8_t send_data);
- void ppm_send_unit(uint8_t send_data);
- void time1_init();
- uint16_t adc_read()
- {
- ADCON1=0x80; //fosc/2Ż¼A┐┌Č╝╩ŪAD┐┌Ż¼Vref=VDD
- ADCON0=0x01; //AN0▀M(j©¼n)ąą▐D(zhu©Żn)ōQŻ¼į╩įS▐D(zhu©Żn)ōQ
- //ADFM ADCS2 -- -- PCFG3 PCFG2 PCFG1 PCFG0
- // 1 0 0 0 0 0
- //ADCS1 ADCS0 CHS2 CHS1 CHS0 GO/DONE -- ADON
- // 0 0 0 0 0 0 1
- __delay_ms(2); //delay
- GO=0x01; //ķ_╩╝AD▐D(zhu©Żn)ōQ
- while(GO); //╩Ūʱ▐D(zhu©Żn)ōQ═Ļ«ģŻ¼GO=0▐D(zhu©Żn)ōQ═Ļ«ģ
- uint16_t adc_result=(uint16_t)ADRESH<<8 |ADRESL; //▐D(zhu©Żn)ōQĮY(ji©”)╣¹,10bits
- return adc_result; //return ADC results
- }
- void sys_init() //SYS INIT
- {
- TRISC=0; //PORTC is output
- PORTC=0; //Clear PORTC
- TRISD=0; //PORTD is output
- PORTD=0; //Clear PORTD
- }
- void uart_init() //UART INIT
- {
- TXSTA =0x24; //TXEN=1,TX enable
- //BRGH=1,high speed baud
- RCSTA =0b10010000; //SPEN=1,receive enable
- //CREN=1
- TRISB=0x00; //PORTB is output
- SPBRG=103; //SPBRG=FOSC/(16*baud)-1; (high speed baud)
- // =16000000/(16*9600)-1
- // =104-1=103
- INTCON=0; //no interrupt
- PIE1=0; //PIE1 disable
- PIE2=0; //PIE2 disable
- PIR1=0; //Clear PIR1(flag of interrupt)
- PIR2=0; //Clear PIR2(flag of interrupt)
- }
- void usart_send_16bits(uint16_t send_data) //send 2 bytes
- {
- uint16_t send_buffer;
- send_buffer=send_data;
- usart_send_8bits((uint8_t)(send_buffer>>8)); //send high byte
- usart_send_8bits((uint8_t)(send_data)); //send low byte
- }
- void usart_send_8bits(uint8_t send_data) //send one bytes
- {
- TXREG=(uint8_t)(send_data);
- while(TRMT==0); //send is over
- }
- void TMR1_init() //TMR1 INIT
- {
- T1CON=0; //TMR1 is TIMR
- TMR1=(uint16_t)(65535-985); //delay is 1000*FOSC=1000*0.25=250us
- TMR1IF=0; //Clear TMR1IF
- }
- void PWM_init() //PWM INIT
- {
- PR2=0xff; //īæ╚ļPR2╝─┤µŲ„įO(sh©©)ų├PWMų▄Ų┌Ż¼PWMų▄Ų┌=[(PR2)+1]*4*TOSC*(TMR2ŅA(y©┤)ĘųŅl▒╚)
- // =[255+1]*4*4/16=256us
- CCPR1L=0; //Clear CCPR1L
- T2CON=0x01; //TMR2ŅA(y©┤)ĘųŅl▒╚=1:4
- CCP1CON=0; //Clear CCP1CON
- CCP2CON=0; //Clear CCP2CON
- TMR2ON=1; //TMR2 enable
- }
- void PPM_unit(uint8_t send_data) //PPM send half byte
- {
- TMR1_init(); //TMR1 delay 250us
- TMR1ON=1; //TMR1 enable
- TMR2=0xF0; //to start PWM
- CCPR1L=(uint8_t)(send_data<<3); //CCPR1L
- CCPR2L=(uint8_t)(CCPR1L+8); //CCPR2L=CCPR1L+8
- CCP1CON=0x0c; //CCP1 PWM enable
- CCP2CON=0x0c; //CCP2 PWM enable
- while(TMR1IF==0); //250us delay is over
- TMR1IF=0; //clear TMR1IF
- CCP1CON=0x0; //CCP1 PWM disable
- CCP2CON=0x0; //CCP2 PWM disable
-
- }
- void PPM_send(uint16_t send_data) //PPM send 2 byte
- {
- uint8_t send_buffer[7];
- send_buffer[3]=(uint8_t)send_data; //half byte
- send_buffer[4]=(uint8_t)send_data; //half byte
- send_buffer[5]=(uint8_t)(send_data>>8); //half byte
- send_buffer[6]=(uint8_t)(send_data>>8); //half byte
- send_buffer[0]=0; //head
- send_buffer[1]=0; //head
- send_buffer[2]=0; //head
- send_buffer[3]=(uint8_t)(send_buffer[3] & 0x0f); //half byte
- send_buffer[4]=(uint8_t)(send_buffer[4]>>4); //half byte
- send_buffer[5]=(uint8_t)(send_buffer[5] & 0x0f); //half byte
- send_buffer[6]=(uint8_t)(send_buffer[6]>>4); //half byte
- for(uint8_t i=0;i<7;i++)
- {
- PPM_unit(send_buffer[i]); //PPM send head(0,0,0) & half byte,half byte,half byte,half byte 7 bytes
- }
- }
- void UART_disp(uint16_t uart_data) //UART DISP
- {
- for(uint8_t i=0;i<19;i++)
- {
- usart_send_8bits(uart_disp1[i]); //PRINT"ADC result(DEC) is:"
- }
- uint8_t buff[4];
- sprintf(buff,"%d",uart_data); //ADC result Dec
- for(uint8_t i=0;i<4;i++)
- {
- usart_send_8bits(buff[i]); //
- }
- usart_send_8bits(0x0d); //send "enter"
- }
- void main(void)
- ĪŁĪŁĪŁĪŁĪŁĪŁĪŁĪŁ
- ĪŁĪŁĪŁĪŁŽ▐ė┌▒Š╬─Ų¬Ę∙ ėÓŽ┬┤·┤ašł(q©½ng)Å─51║┌Ž┬▌dĖĮ╝■ĪŁĪŁĪŁĪŁ
0.png (57.51 KB, Ž┬▌d┤╬öĄ(sh©┤): 141)
Ž┬▌dĖĮ╝■
2018-6-14 16:56 ╔Žé„
╦∙ėą┘Y┴Ž51hei╠ß╣®Ž┬▌d:
 sendrece2.rar
(499.06 KB, Ž┬▌d┤╬öĄ(sh©┤): 90)
sendrece2.rar
(499.06 KB, Ž┬▌d┤╬öĄ(sh©┤): 90)
2018-6-14 15:55 ╔Žé„
³c(di©Żn)ō¶╬─╝■├¹Ž┬▌dĖĮ╝■
Ž┬▌dĘeĘų: ║┌Ä┼ -5
| 




 ╣▄└ĒåTQQ:125739409;╝╝ąg(sh©┤)Į╗┴„QQ╚║281945664
╣▄└ĒåTQQ:125739409;╝╝ąg(sh©┤)Į╗┴„QQ╚║281945664





 QQ║├ėč║═╚║
QQ║├ėč║═╚║ QQ┐šķg
QQ┐šķg “vėŹ╬ó▓®
“vėŹ╬ó▓® “vėŹ┼¾ėč
“vėŹ┼¾ėč ╩š▓ž
╩š▓ž ╠į╠¹
╠į╠¹ Ēö
Ēö ▓╚
▓╚