新人報(bào)到,電子設(shè)計(jì)大賽的小車(chē)的說(shuō)明和控制電路
操作說(shuō)明 1 線路連接 小車(chē)使用12V鉛蓄電池,電池電量不足時(shí),無(wú)法帶動(dòng)小車(chē)。需要進(jìn)行充電,使用12V的充電器充8小時(shí)為宜。 在安裝是注意接收模塊的安裝方向,安裝如圖1所示。 給發(fā)射模塊供電,發(fā)射模塊電路接口如圖2所示。接線注意正負(fù)。供電電壓(VCC)3~12V都可。 2操作步驟說(shuō)明 正確連接和電源指示等正常工作后,程序復(fù)位,小車(chē)進(jìn)入操作模式選擇,小車(chē)的可選模式為(前進(jìn)、后退、紅外尋跡)。程序內(nèi)部設(shè)立標(biāo)志,用于統(tǒng)計(jì)用戶所想要的模式。 K3鍵為確定鍵,每次按下操作鍵(K1、K2、K4)時(shí),都需要按K3來(lái)通知微控制器當(dāng)前的狀態(tài)。 在小車(chē)處于運(yùn)動(dòng)狀態(tài)時(shí),按下K1,K2,K3中的任何一個(gè)時(shí),都可以使小車(chē)停止運(yùn)動(dòng)。 K4鍵為模式選擇鍵。第一次按下K4,確定后(按K3),內(nèi)部程序標(biāo)K4_m=1,程序進(jìn)入前進(jìn)模式。在此時(shí)按K1(或K2),確定后(按K3),小車(chē)進(jìn)入左轉(zhuǎn)前進(jìn)(或右轉(zhuǎn)前進(jìn))狀態(tài)。 第二次按下K4,確定后(按K3),內(nèi)部程序標(biāo)志K4_m=2,程序進(jìn)入后退模式。在此時(shí)按K1(或K2),確定后(按K3),小車(chē)進(jìn)入左轉(zhuǎn)后退(或右轉(zhuǎn)后退)狀態(tài)。 第三次按下K4,確定后(按K3),內(nèi)部程序標(biāo)志K4_m=3,此時(shí),小車(chē)進(jìn)入紅外尋跡狀態(tài)。小車(chē)的紅外對(duì)管處在白色的地面上時(shí),程序默認(rèn)的是前進(jìn)。處于黑色的地面上時(shí),程序默認(rèn)的是前輪左右轉(zhuǎn)彎,但小車(chē)不前進(jìn)。將小車(chē)放置于白色有黑線的地面上時(shí)(注意:黑線的寬度應(yīng)為3~4CM為宜,不要超過(guò)紅外對(duì)管的間距!),小車(chē)可以自動(dòng)按照黑線前進(jìn)。 第四次按下K4,確定后(按K3),內(nèi)部程序標(biāo)志全部復(fù)位清零。此時(shí),小車(chē)在此進(jìn)入操作模式選擇。 小車(chē)上電復(fù)位后,若想直接讓小車(chē)后退,操作方法如下。 按下K4,再按K3,再按K4,再按K3,連續(xù)按下之后,小車(chē)的標(biāo)志K4_m=2,小車(chē)進(jìn)入后退模式。 若想從現(xiàn)在的后退模式進(jìn)入前進(jìn)模式,操作方法如下。 按下K4,再按K3,再按K4,再按K3,再按K4,再按K3,此時(shí)小車(chē)的標(biāo)志K4_m=1,小車(chē)進(jìn)入了前進(jìn)模式。按下K2,再按K3,小車(chē)開(kāi)始右轉(zhuǎn)前進(jìn)。
智能遙控尋跡小車(chē)摘要:本小組設(shè)計(jì)小車(chē)為一款工作在51單片機(jī)下的遙控小車(chē),用無(wú)線電遙控小車(chē)運(yùn)行。小車(chē)又可以工作在自動(dòng)尋跡狀態(tài),可以跟隨地面上的黑線前進(jìn)。當(dāng)小車(chē)靠近障礙物時(shí),小車(chē)會(huì)自動(dòng)避障。本作品適合單片機(jī)初學(xué)者了解和學(xué)習(xí)單片機(jī),也適合機(jī)器人愛(ài)好者了解智能控制的基礎(chǔ)教材。 1系統(tǒng)簡(jiǎn)介 1.1系統(tǒng)方案 根據(jù)課題的設(shè)計(jì)要求,本方案主要由電源模塊、微控制模塊、尋跡模塊、電機(jī)驅(qū)動(dòng)模塊、發(fā)射模塊和接收模塊組成。系統(tǒng)框圖如圖3所示。 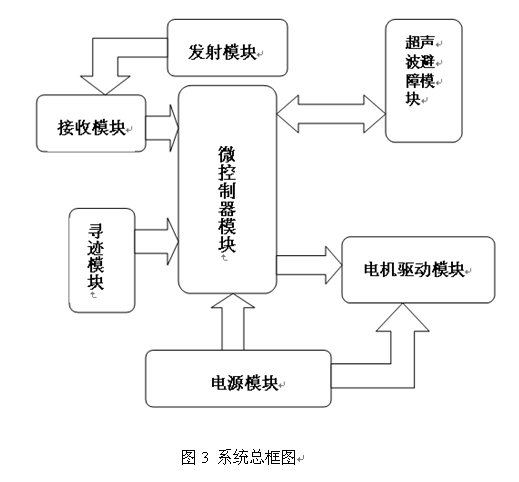
為了較好的實(shí)現(xiàn)各個(gè)模塊的功能,我們做了如下的論證。 1.1.1小車(chē)車(chē)體的選擇 第一種方案是自己用覆銅板和電機(jī)自制一個(gè)兩電機(jī)小車(chē),前輪使用步進(jìn)電機(jī)做轉(zhuǎn)向,后輪用直流電機(jī)做動(dòng)力。第二種方案也是制作一個(gè)小車(chē),不過(guò)小車(chē)前面使用萬(wàn)用導(dǎo)向輪做轉(zhuǎn)向,小車(chē)后面用兩個(gè)直流電機(jī)做轉(zhuǎn)向控制,通過(guò)調(diào)節(jié)兩個(gè)電機(jī)的轉(zhuǎn)速,調(diào)節(jié)小車(chē)的速度和轉(zhuǎn)向。這兩種方案中心都是自制一個(gè)小車(chē),考慮到傳動(dòng)裝置的缺乏和購(gòu)買(mǎi)傳動(dòng)裝置的費(fèi)用較高,而且組裝出來(lái)的裝置傳動(dòng)效果可能不太理想,就放棄了自制小車(chē)的兩個(gè)方案。 第三種方案是購(gòu)買(mǎi)成品小車(chē),由于得到老師提供的一款玩具小車(chē)的底座,通過(guò)分析該小車(chē)的轉(zhuǎn)向角和帶負(fù)載能力,都可以滿足本系統(tǒng)的要求。試驗(yàn)時(shí),在小車(chē)上放置四塊較大覆銅板,小車(chē)的速度還需要通過(guò)PWM降速,使其速度滿足紅外尋跡的要求。所以最后選擇了該方案。 1.1.2驅(qū)動(dòng)電機(jī)電路的選擇 所選的小車(chē)底座有兩個(gè)直流電機(jī)。單片機(jī)的驅(qū)動(dòng)能力無(wú)法直接驅(qū)動(dòng)直流電機(jī),所以要使用電機(jī)驅(qū)動(dòng)電路。第一種方案是,選用H橋驅(qū)動(dòng)兩個(gè)直流電機(jī)。H橋驅(qū)動(dòng)電路電路比較復(fù)雜,并且是單片機(jī)直接控制,電路的性能無(wú)法保證。最后不做考慮。 第二種方案是用驅(qū)動(dòng)芯片驅(qū)動(dòng)電機(jī)。驅(qū)動(dòng)芯片可以減少電路的復(fù)雜度,使電路美觀,且效率較高。通過(guò)考慮各種驅(qū)動(dòng)芯片的性能和我校實(shí)驗(yàn)室的現(xiàn)有資源,選擇了L298N驅(qū)動(dòng)芯片,它可以驅(qū)動(dòng)兩個(gè)直流電機(jī),并對(duì)兩個(gè)直流電機(jī)進(jìn)行PWM調(diào)速。在設(shè)計(jì)電路時(shí),使用現(xiàn)在比較流行的光耦隔離電路,將單片機(jī)控制電路和直流電機(jī)驅(qū)動(dòng)電路隔離。 第一種方案是選用多塊串聯(lián)的可充電鋰電池。但是由于鋰電池的重量較輕,需對(duì)電機(jī)進(jìn)行過(guò)大的PWM調(diào)速,使得電機(jī)的驅(qū)動(dòng)力大大下降。其次是電池的價(jià)格較高,于是便放棄此方案。 第二種方案是使用12V的鉛蓄電池,第一考慮的就是小車(chē)的帶負(fù)載能力,通過(guò)試驗(yàn)得知,小車(chē)帶同樣重量的負(fù)載時(shí),還需要進(jìn)行PWM調(diào)速,速度才可以滿足要求。通過(guò)調(diào)整重心的位置,使重心后移,小車(chē)可以自由的進(jìn)行轉(zhuǎn)向,從而對(duì)自動(dòng)尋跡的轉(zhuǎn)向沒(méi)有任何影響,最后便選擇了該方案。 1.1.4尋跡模塊的選擇 第一種方案是選擇精準(zhǔn)度較高的紅外探測(cè)傳感器,但是考慮到價(jià)格和小車(chē)的帶負(fù)載能力,放棄了這個(gè)方案。 第二種方案是使用紅外對(duì)管,特點(diǎn)是價(jià)格低,質(zhì)量輕,對(duì)小車(chē)的轉(zhuǎn)向不會(huì)造成影響。在使用時(shí),測(cè)試的效果不夠理想,檢測(cè)的靈敏度非常低,不能夠滿足自動(dòng)尋跡的要求。在后來(lái)的實(shí)驗(yàn)中,在每個(gè)紅外對(duì)管的外面套上熱縮管,減少外界光線對(duì)紅外對(duì)管的干擾,使得紅外對(duì)管的檢測(cè)靈敏度大大提高,達(dá)到了尋跡檢測(cè)的要求,所以最后選擇了該方案。 1.1.5遙控模塊的選擇 第一種方案是紅外遙控。紅外遙控的電路比較簡(jiǎn)單,實(shí)現(xiàn)起來(lái)比較方便。但是紅外遙控的弊端是容易受到外界光線的干擾,并且紅外遙控必須使遙控端和被遙控端相對(duì)且處于接近一條直線上,這樣根本不能實(shí)現(xiàn)對(duì)小車(chē)的全方位遙控。所以最后放棄了這個(gè)不太合理的方案。 第二種方案是使用無(wú)線電遙控。一般的無(wú)線電電路制作出來(lái)之后的效果太理想,為了保證遙控的效果,選擇了集成的無(wú)線電模塊電路(315M發(fā)射和接收模塊)。為方便對(duì)無(wú)線電的控制,最后選擇了PT2262-L4芯片和PT2272芯片來(lái)實(shí)現(xiàn)編碼。 1.1.6智能遙控尋跡小車(chē)的最終方案 1)車(chē)體為成品玩具車(chē)的底座,包括兩個(gè)直流電機(jī)。 - 電機(jī)驅(qū)動(dòng)電路選擇為光耦隔離的L298N驅(qū)動(dòng)電路。
- 電源選擇12V的鉛蓄電池。
- 智能尋跡模塊選用紅外對(duì)管。
- 使用編碼芯片通過(guò)無(wú)線電發(fā)射接收模塊進(jìn)行遙控。
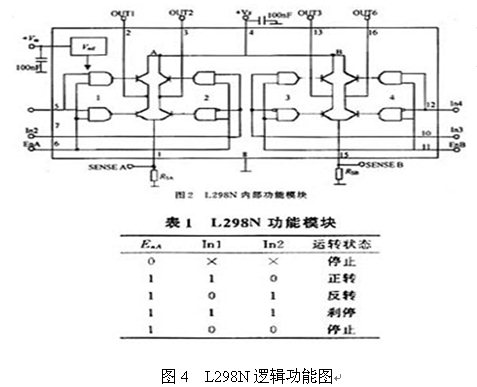
1.2硬件系統(tǒng)設(shè)計(jì) 1.2.1電機(jī)驅(qū)動(dòng)模塊 驅(qū)動(dòng)芯片使用的是SGS公司的產(chǎn)品LM298N,15腳Multiwatt封裝的。內(nèi)部同樣包含4通道邏輯驅(qū)動(dòng)電路。可以方便的驅(qū)動(dòng)兩個(gè)直流電機(jī)。其驅(qū)動(dòng)直流電機(jī)電路的優(yōu)點(diǎn)是電路簡(jiǎn)單可靠,輸出電壓最高可達(dá)50V,可以直接通過(guò)電源來(lái)調(diào)節(jié)輸出電壓,帶上TLP521光耦后,有利于單片機(jī)的控制。 L298N可接受標(biāo)準(zhǔn)TTL邏輯電平信號(hào)VSS,VSS可接4.5~7 V電壓。4腳接電源電壓,電壓范圍VIH為+2.5~46 V。輸出電流可達(dá)2.5 A,可驅(qū)動(dòng)電感性負(fù)載。L298可驅(qū)動(dòng)2個(gè)直流電動(dòng)機(jī),在本模塊中,我們把OUT1,OUT2和OUT3,OUT4之間分別接電動(dòng)機(jī)。5,7,10,12腳接輸入控制電平,控制電機(jī)的正反轉(zhuǎn)。6(EnA),11(EnB)腳分別接PWM控制端,調(diào)節(jié)電機(jī)的轉(zhuǎn)速。 圖4為L(zhǎng)298N的功能邏輯圖,圖5為電機(jī)控制電路原理圖,其中1,15腳為輸出電流反饋引腳,通常在使用中可以直接接地。 1.2.2尋跡模塊電路 本模塊選用的器件是比較便宜的紅外對(duì)管,通過(guò)電位器調(diào)節(jié)紅外發(fā)射管的功率,將紅外線發(fā)射出去,接收管接收經(jīng)過(guò)地面反射回來(lái)的紅外線,由于黑色會(huì)吸收較多的紅外線,從而使接收管接收到的紅外線減少,使接受管輸出端產(chǎn)生電平信號(hào)的變化。為了消除紅外對(duì)管的抖動(dòng),在電路圖中加入史密斯觸發(fā)器來(lái)穩(wěn)定信號(hào),選用的集成芯片是74LS14,其內(nèi)部邏輯圖如圖6所示。 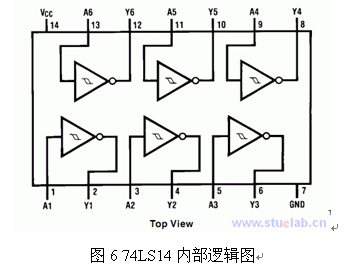
紅外尋跡電路原理圖如圖7所示。 
在紅外對(duì)管的外面加設(shè)熱縮管,大大提高了紅外對(duì)管的靈敏度,實(shí)物圖如圖8所示。 
1.2.3無(wú)線電遙控模塊 為了保證無(wú)線電遙控的效果和穩(wěn)定性,選擇了現(xiàn)在比較流行的315M無(wú)線發(fā)射和接收模塊,發(fā)射模塊如圖9所示,接收模塊如圖10所示。 

使用編碼芯片可以提高信號(hào)的穩(wěn)定性和正確性,保證遙控時(shí)不會(huì)出錯(cuò)。使用的芯片是PT2262-L4引腳圖如圖11所示,PT2272引腳圖如圖12所示。 

該芯片的優(yōu)點(diǎn)是可以把電壓加到12V來(lái)增大發(fā)射模塊的功率,從而增大了發(fā)射接收的距離,增強(qiáng)了該模塊的實(shí)用性。發(fā)射模塊電路圖如圖13所示,接收模塊電路圖如圖14所示。 

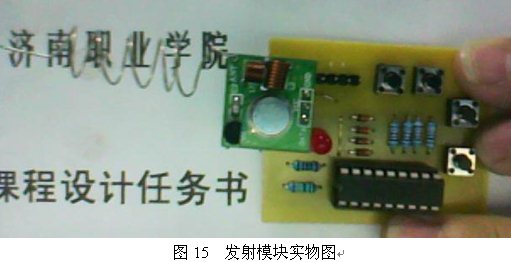
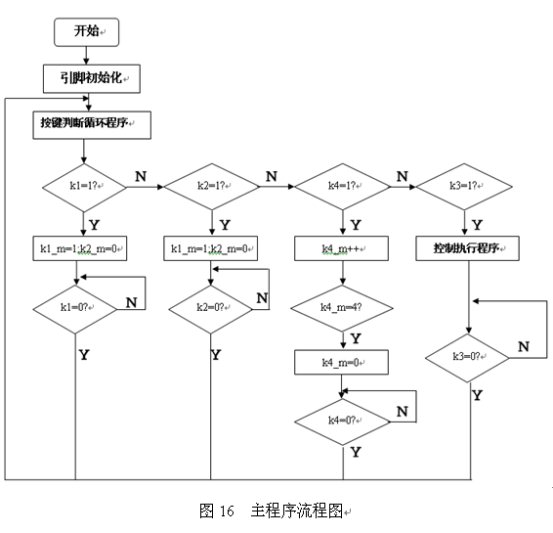
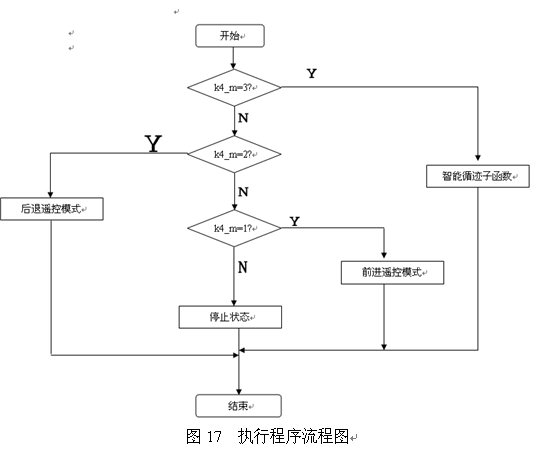
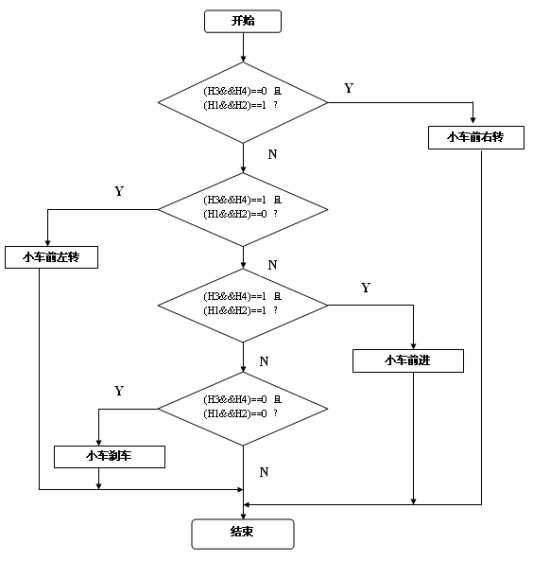
制作后的發(fā)射模塊實(shí)物為圖15所示。 1.2.5軟件流程圖 主程序程序流程圖如圖16所示。執(zhí)行部分流程圖如圖17所示。智能尋跡子函數(shù)流程圖如圖18所示。 圖18 智能尋跡子函數(shù)流程圖 2 特色列舉 本設(shè)計(jì)選用的集成元件L298N,PT2262,PT2272等,簡(jiǎn)化了硬件設(shè)計(jì),縮小了硬件空間,提高了系統(tǒng)穩(wěn)定性,軟件設(shè)計(jì)使用PWM調(diào)制技術(shù),在實(shí)現(xiàn)原有功能的基礎(chǔ)上,減小了電功率,更加節(jié)能。系統(tǒng)設(shè)計(jì)時(shí),基本上都使用現(xiàn)在比較通用的電路模塊和集成芯片,利于系統(tǒng)的維護(hù)。設(shè)計(jì)選用的器材實(shí)用性強(qiáng),價(jià)格較合理,成本適中。本系統(tǒng)小車(chē)是智能和人工控制并存,適合單片機(jī)初學(xué)者的制作與學(xué)習(xí)。 3系統(tǒng)使用范圍 本系統(tǒng)可作為單片機(jī)初學(xué)者對(duì)單片機(jī)功能的了解及進(jìn)一步學(xué)習(xí)的實(shí)訓(xùn)教材,提高他們學(xué)習(xí)單片機(jī)的興趣和動(dòng)手能力;也可開(kāi)發(fā)汽車(chē)的自動(dòng)避障功能,提高道路安全的模擬實(shí)驗(yàn);部分功能模塊,可應(yīng)用于工廠的自動(dòng)控制,例如無(wú)線遙控機(jī)器設(shè)備、工業(yè)產(chǎn)品的自動(dòng)往返運(yùn)輸。系統(tǒng)的自動(dòng)尋跡為智能模塊,也可作為機(jī)器人愛(ài)好者的學(xué)習(xí)基礎(chǔ)材料。 機(jī)會(huì)!

全部資料51hei下載地址:
 電子設(shè)計(jì)2.zip
(85.5 KB, 下載次數(shù): 54)
電子設(shè)計(jì)2.zip
(85.5 KB, 下載次數(shù): 54)
2018-7-27 00:00 上傳
點(diǎn)擊文件名下載附件
 電子大賽小車(chē).doc
(1.17 MB, 下載次數(shù): 37)
電子大賽小車(chē).doc
(1.17 MB, 下載次數(shù): 37)
2018-7-26 23:57 上傳
點(diǎn)擊文件名下載附件
| 
 [復(fù)制鏈接]
[復(fù)制鏈接]