|
ǰ��
�C���˽����ڙCе�������c���ƵȞ�һ�w���W�������X���ý�Q���H���}���^���У���Ч�������߉˼�S�������Д����������������̈́�(chu��ng)���������nj�ʩ���|������һ����Ҫƽ�_��ʮ�����������B(y��ng)������Ҫ�ĸ����|�˲š����ƏV�C���˽������Ї��������g�f(xi��)�����I(y��)ί�T�������ˡ��C�����M�n�á��Ŀ��ԓ�Ŀ����ȫ������ʡ���Եط��n�̻�У���n�̵���ʽ�_չ�C���˽�������ԇ�c�_ʼ�e�۽�(j��ng)�U��Ӱ푣�ֱ���γɱ鼰ȫ���ij���ęC���˽����n�̡� �����ЌW���ҳɞ顰�C�����M�n�á��Ŀ���������WУ����2011���_ʼ��ʩ����Arduino�ęC�����n�̡�����ӽ̲���ϡ�Arduino��(chu��ng)��C���ˡ��n���M��ʹ�ã����㽭ʡ�����ЌW�x�����ώ��������ώ�������ƌW�WԺ�о����������������̈́�������λͬ�Wһ�����c����������������С�W��Arduino�x���n�̣���Arduino��(chu��ng)��C���ˡ��OӋ�˴�����Ҫ�W�������`���΄ջ��ߌ������W�������ЌW�����ЌW�� ����ӽ̲Ĺ��OӋ��22�n������4��(ji��)�n���x�W���ݡ��҂������̎����Ãɹ�(ji��)�n�B�ϵķ�ʽ����9�����}18�n�r����ʽչ�_�̌W����Ȼ��Ҳ���Բ��Æι�(ji��)�n����ʽ�����н̲��е�1�n���Þ�1�n�r������(j��)�W���ČW����r���m���{���n�r������Зl�������h���ӎׂ��C�τ�(chu��ng)��Ļ���n���n�r���ӵ�36�����w�̲ĵ��n�r����Ո�����҂��ṩ�̌W�OӋ���̌W�n�����̌Wҕ�l���YԴ�� �鷽�����ČWУ�_չ�̌W��Ҳ����W��������(j��)�W(w��ng)�jҕ�l���̲��ԌW���҂�����顰Arduino��(chu��ng)��C���ˡ��̲��OӋ�ˌW������������Arduino�Ї�������DFRobot��˾�ĸ��Nģ�K�����xģ�K�ăr���600���ҡ���Ҳ���Ը���(j��)������Σ�ͨ�^�Ԍ��W(w��ng)���������ُ�I������(j��)�о��M�̣��҂����Ƴ�����Ʒ�Ƶ�Arduino�W������ ����ӽ̲ĵ�ӑՓ��ַ��blog.sina.com.cn/xiezuoru Arduino��(chu��ng)��C���ˌW������ַ��www�cdfrobot�ccom�ccn
�̲�Ŀ� �wՓ �J�R�C���� ��һ�� ����LED ��1�n ���MArduino������ ��2�n �W�qLED ��3�n ���o���Ƶ�LED ��4�n ���İ��o ��5�n ������ ��6�n ���LED ��7�n LED�C�τ�(chu��ng)�� �ڶ��� �����L�� ��1�n ���L�� ��2�n �Q���L�� ��3�n �Ԅ�׃���L�� ��4�n �b���L�� ��5�n �u�^�L�� ��6�n �ԄӸ�ۙ�L�� ��7�n �L�ȾC�τ�(chu��ng)�� ������ ����С܇ ��1�n ��ֱ��С܇ ��2�n ��8�����С܇ ��3�n ����С܇ ��4�n ������С܇ ��5�n Ѳ��С܇һ ��6�n Ѳ��С܇�� ��7�n С܇�C�τ�(chu��ng)�� ��䛣�Arduino�C���˽̌W��
�wՓ �J�R�C����
�Ƽ�ÿ�rÿ�̶�����Ȼ��׃���҂�������C�����@����ǰ�����b���ɼ��������ѽ�(j��ng)�����������҂����ճ������С�ʲô�ǙC���ˣ�ʲô�����ܙC���ˣ���ô�W���C���˼��g���ھwՓ���֣��҂����˽�C���ˣ�����C���˵Ď״���Ҫ�M�ɲ����Լ������Ĺ��ܡ� ���΄Ռ����� �J�R�C���˵Ď״���Ҫ�M�ɲ��ּ��书�ܡ� �˽�C���˼��g�İl(f��)չ�� ��������x�� 1��ʲô�ǙC���ˣ� �C���ˣ�Robot���@���~������F(xi��n)�������o���ݿ˿ƻ����ҵ�һ���������_��ķ���f�ܙC���ˡ���С�f�У���ԭ���ﱾ���nj�����Robota���ģ����������׃���˴�Ҷ����ܵġ�Robot��һ�~�����^����ҿɄe���C�����@���������`�����J��C���˾�һ���L�ú��҂�����Ў����ơ����H�ϣ��C���˵����ǧ��ٹ֣��ܶ���҂�������]�а��c�����Կ��ԡ���ô�C��������ζ��x���أ��ƌW�҂��f�����C������һ�N�Ԅӻ��ęC�����܉����������Ą����Ϳ����������F(xi��n)ij�N�΄գ��@�N�C���߂�һЩ�c�˻��������Ƶ��������������֪������Ҏ(gu��)�����������������ͅf(xi��)ͬ�����ȡ��������@�����x���҂��ճ�������ÿ�춼���|���ĺܶ��Cе�O�䣬�磺�Ԅ���؛�C��ȫ�Ԅ�ϴ�C���Ԅ�ȡ��C�������Ǽt��Б����Ԅӛ_ˮ�RͰ�������ǙC�����ˡ������C�����x�҂���������h�����ɣ� �����ܙC���˱���һ��ęC���ˁ����M��һ�������һ���C�����܉����Â�������֪�ⲿ���磬Ȼ���������������܌����h(hu��n)����׃��������������ô�@�N�C���˾Ϳ��Ա��������ܙC�����ˡ� 2���C���˵�����M�ɲ��� ����(j��)�C��������Ҫ��ɵ��΄ղ�ͬ���������OӋҲ��ǧ���f�e�������ò���y����Ҏ(gu��)�ɡ����^������҂��м��،������������Y�͕��l(f��)�F(xi��n)�������(sh��)�ęC���˟o�����������Ďׂ����֣������@�״���������������w�����܉�һһ�����أ� �C���˵Ĵ��X������������ ���҂���Ĵ��Xһ�ӣ��C���˵Ĵ��X���������������ǙC��������ĵIJ������҂�?y��u)�C���˾����ĸ��N���Ƴ�����˹����ܳ���Ҫ�\�������������С��əC���˵Ă������õ��ı�������h(hu��n)����Ϣ���@��õ��R����Ȼ��������е��˹����ܳ���͕����@Щ��Ϣ�M��̎�������S֮�o���N��������(zh��)�����l(f��)����������C���˾������@�N��ʽȥ��(zh��)�и��N���ӌ��H���΄��ˡ� ��ô�����������w��ʲô�|���أ����H�ϣ�������һ�NӋ��C���ѡ��@���Ӌ��C��һ���ஔ�����ĸ�������ɲ��H�H��ָ�҂�����ÿ���õĂ�����X�����˂�����X�⣬߀����������ɫɫ�ĸ��NӋ��C��С��ֻ��ͬ�W��ָ���w��С�Ć�Ƭ�C��MCU������Ҫ�b�M�ׂ����g�ij���Ӌ��C�����@ЩӋ��C����V���������C���˿�������߀��Ҫ��(sh��)��Ƭ�C�ˡ�ͬ�W��������һ�룬����҂�Ҫ����һ�_ȫ�Ԅ�ϴ�C����ǰ���f�^��ȫ�Ԅ�ϴ�CҲ��һ�N�C���ˡ�����ô����һ�_������Xȥ�����������Dz��Ǿ���Щ�����u��ţ�������أ��@�N�r��Ƭ�C�Ϳ��Դ�չȭ�_�ˡ���Ƭ�C�ǵ��͵ġ���ȸ �mС�����K��ȫ����һƬСС�Ć�Ƭ�C�оͰ���������̎�������惦�������r������(sh��)��ݔ��/ݔ���ӿڡ�ģ�Mݔ��/ݔ���ӿڵȡ���������ʹ�õęC���˵���������������һ����Ƭ�C����ĵģ�����Ӌ�������f�������ܕ���ͬ�W��һ����СС��һƬ��Ƭ�Cһ���������ǧ�f�ε��\���أ� �C���˵��۾���������|�ǡ��������� ����C����ֻ�ܰ����҂����õij���ָ����һ��һ���ж��Ƕ����Єӣ����������@��̫���������أ��ƌW�҂�������k���C���˾߂��˸��ߵ����ܣ������܉����(j��)�h(hu��n)����׃�����������������f���F(xi��n)���ѽ�(j��ng)�з��ՙC���˿��Ը���(j��)���˼���Ĝض�׃���{��(ji��)���{��ů�⣬����һֱ̎�����m�ĭh(hu��n)���С��ٱ����f���ڇ����һЩ�����^���ѽ�(j��ng)�Ќ��ΙC���˞��˂������ˣ������ܲ�֪ƣ��؎��I���M�Ѕ��^�����M���v�⡣�����ڲ����^�У��ˁ����������ΙC������ô�܉��ֹ�Լ�ײ�������ο��أ��@Щ������Ҫ�������������팍�F(xi��n)�ˡ��������������҂�����۾������ӡ�������DŽ�����|�ǡ��{���������Ԍ��h(hu��n)���е����⡢늡��š��ضȡ���ȵ��������D����C���˵Ĵ��X��������������̎�������̖��������ͨ�^�xȡ�@Щ���̖�Ϳ��Ժܿ�֪���܇��l(f��)����ʲô��Ȼ�����е����ܳ���Ϳ��Ը���(j��)�܇��h(hu��n)����׃�����������r��푑��ˡ� �C���˵��֡��㡪�������͈�(zh��)���� ǰ�����e�ęC���˵����ӣ������ܳ�ˮ�RͰ��ȫ�Ԅ�ϴ�C�ȣ����Ǜ]���Ƅ������ęC���ˡ��������뿴�����ܵęC����Ҳ�S�ܸ��õ؎�������҂��ɲ����������ܹܼҙC����ֻ�ܴ���һ�����g�У����ɣ���ˣ��˂�������һ����������\�ӵęC���ˣ��������Q���ƄәC���ˡ������������ƄӵęCе������O��ͽ���������ͬ�ӣ��C���˵�����Ҳ���廨���T�������(sh��)�C���˾����҂��ճ������г�Ҋ�ĸ��N܇�vһ�ӣ�����݆�ӻ����Ď��\�ӵġ�Ҳ�ЙC���ˑ��÷����Wԭ�������˻����һ���Ã��㡢���������ķ�ʽ�\�ӡ�߀�еęC���˿������������a����������������գ�����������һ�����ɵ؝���ˮ�¡��������������Ď������Dz��ǙC����׃����ɽ�º����o���������أ� �C���˵ĽY�����Á팍�H����ض��΄յ��b�þͱ�������(zh��)�����������Ԅ���؛�C�У���؛��ȡ�����o͵��b�þ��Lj�(zh��)������߀��һЩ�C���˵Ĉ�(zh��)�������ӏ��s��Ҳ����������������ֱۡ��F(xi��n)�����S�еĺ��әC���ˡ�����C���ˡ��a��C���˾Ͷ���һֻ�`����ѵ��֡�Ҳ�S�ڹ��S����ijЩ���g��r���C����߀�Dz����н�(j��ng)�������������������Щ�ߏ��ȡ��؏��ԵĄڄӕr���C���˾͕�ȫ��ٳ��ˣ��������Բ�֪ƣ��ع������ֿ��ֺõ�����΄ա��F(xi��n)�������M�ęC�����ѽ�(j��ng)�����M�Џ��s��������g�ˡ��@Щ�Dz��Ǻ������أ� �����ֲ����� ������}�����������еęC���ˡ� ͬ�W������������Ҋ�����N���әC���˵���Ӱ���҂�����l(f��)�F(xi��n)���۾���ȥ���������еĸ��N�C���ˣ��������@��(ji��)�n�҂��̽o��ҵ�˼·���������Ď״�M�ɲ��ְɣ�����ĽY���������ı����С� ��1 ���������еęC���� ��̽��˼���� �����ǡ��K�Y�ߡ�߀�ǡ�I��Robot����AI�͙C����ԇ�Dȡ���������һ�N�O���ձ���뷨�����S�@���������δ���Ƽ��Ŀֻţ����@��δ��ֹ���g���M�����mȻ����������в����A֪�Ą�(chu��ng)���ԣ����C�����ںܶ�涼�߂����샞(y��u)�ݡ����ԣ������f�����ʧ�I(y��)���C������͵����Ĺ����� Ո˼��һ�£���Щ���������C������������ԓ������Щ���ߣ� ��ҕҰ��չ�� 1���C��������Ύ�����ģ� �C���˿��Դ����������؏��ԡ��ߏ��ȵ��w���ڄӡ��ڬF(xi��n)�������S�У��ֿ�����w���ڄӶ������ò�֪ƣ��Ĺ��I(y��)�C���˴��湤�ˎ���������ˣ����ˎ���������X��Ļ��Ϳ������ԭ�����K���۵Ĺ����ˡ��C�����M���؏��Թ����r�ľ��_��Ҳ����o���ȔM�ģ���ˮaƷ���|�������б��ϡ� �C����߀���Դ��������Σ�U�����y������ėl���¹��������õČ�������Ҿ͕��l(f��)�F(xi��n)��һ���l(f��)����Ȼ�ĺ��ȞęC���˕��_�ڵ�һ������Ȟą^(q��)�����������ؔ�a���F(xi��n)���ѽ�(j��ng)�аl(f��)�_������܊����b���˙C���ˣ��@�N�C���˿���ؓ�؎װٹ����ڸ��N��ò�h(hu��n)����ǰ�M���������ǵ����ס���ɽ�����ǿƌW�҂���Ҫ̽���ĵط����ٲ��˙C���˵���Ӱ�������l(f��)��Ď״�����̽���C�����ѽ�(j��ng)���ڻ������M�пƿ������ˡ� �C����߀�����c����C��̎���F(xi��n)����������(ji��)��׃��Խ��Խ�죬�����|�S����ͬ�rҲ�a���˸��N������}��Խ��Խ��ġ��ճ����ˡ����ЄӲ���IJ�����Ҫ�ˁ�����挦�@Щ���}���ƌW���g����Ύ����҂��أ��ƌW�҂��OӋ���˸��N���ՙC���ˣ���M���҂���Ҫ��Ո�f�o��һ��ˮ�����ѷ��g�ض��{��һЩ�������ҽ�ͨ��^(q��)�t(y��)Ժ���Ԓ�����Ժ����˂�ֻҪ���@���f���Լ���������ՙC���˾͕����r�M��������Ҫ���ˡ����ˎ����҄գ������˸е��ª��r���C���ˌ���߀����������ˣ��o���˾���ο�塣����(j��)���µĈ���������ƌW�����Ƶ�Nao�C���ˣ��ѽ�(j��ng)�������������]�Y��ͯ�����Үa�����@�˵�Ч�����ܶ�к��˂������ϵK�ă�ͯ��ͨ�^��Nao�C���˵���̎��׃���Լ���Ҳ��׃��δ���� 2��ʲô�dž�Ƭ�C�� ��Ƭ�C��һ�N�����·оƬ���Dz��ó���Ҏ(gu��)ģ�����·���g�Ѿ��Д�(sh��)��(j��)̎������������̎����CPU���S�C�惦��RAM��ֻ�x�惦��ROM����NI/O�ں��Д�ϵ�y(t��ng)�����r��/Ӌ��(sh��)���ȹ��ܣ�����߀�����@ʾ���·���}���{���·��ģ�M��·�D�Q����A/D�D�Q�����·�����ɵ�һ�K��Ƭ�Ϙ��ɵ�һ��С�����Ƶ���Ӌ��Cϵ�y(t��ng)���ڹ��I(y��)�����I��V�����á��������o80������ɮ��r��4λ��8λ��Ƭ�C���l(f��)չ���F(xi��n)�ڵ�300M�ĸ��ن�Ƭ�C��һЩ���ܱ��^���εęC���ˣ������Æ�Ƭ�C����������ġ� 2����ô�W���C���˼��g�� �C���˼��g���Ǹ߲����ʵ��¼��g���������漰�\�ӌW�̈́����W��ϵ�y(t��ng)�Y�������м��g�����Ƽ��g�ȶ��I��Ľ���W�ƣ������C���˵��^�̣��������ϿƌW�����g����(sh��)�W�I���֪�R���Թ��̘˜ʻ���˼���M�оC�ό��`���^�̡��W���C���˵��^�̣����¿��Է֞�ģ�¡����졢��(chu��ng)���������֣�ѭ��u�M��������������������������hͨ�^�Ԍ�����ُ�I���P�ČW���������Լ��Ą�(chu��ng)�⌍�F(xi��n)������
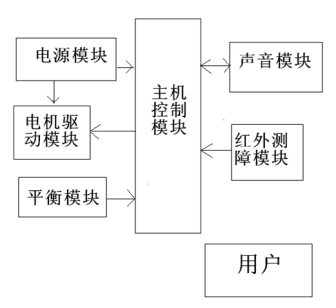
������(zh��n)���ҡ� �������OӋ�ęC��������ô�ӵģ�Ո��đ�����Ҍ��ՙC���˵�����Y�����քe�����C���˸����Ĺ��ܡ�
��һ������LED
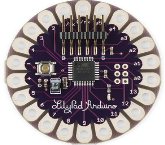
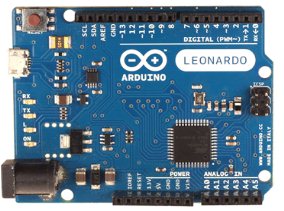
��1�n ���MArduino������ ��ϲ�ÙC�����c�C���˼��g���˶��ԣ�����ϣ���˽�C���˵Ķ��x���䘋��֮�⣬�����dȤ���Dž��c�C���˵��OӋ�c��(chu��ng)�£���ô�҂�����ͨ�^ʲô�������C�����أ�����Л]�н��|�^Arduino��ͨ�^�@��(ji��)�n�ČW�����҂���������M�뵽Arduino�����������Ё��� ���΄Ռ����� 1.�J�RArduino���˽�Arduino���ư�ķN� 2.����Arduino�ӵİ��b�� 3.�w�Arduino���̽��档 ��������x�� 1.ʲô��Arduino Arduino��һ�������_��Դ�a��ܛӲ��ƽ�_���������_��Դ�asimple I/O����棬������ʹ�����Java��C�Z�Ե�IDE�����_�l(f��)�h(hu��n)���͈D�λ����̭h(hu��n)��������Դ�a�_�ź̓r�������ArduinoĿǰ�V���ؑ����ښW���ȇ��Һ͵^(q��)������OӋ�Լ�����ˇ�g�OӋ�I�õ���Make magazine�����İ����Q�顶�������������ȳ������Instructable�ȾW(w��ng)վ���J�ɺ����]��Arduino���Q�顰�Ƽ�ˇ�g��������һ�N�µġ���ߡ��������µ�ˇ�g�d�w�������˸����I����˂����뵽Arduino��������������� Arduino�Ⱥ�l(f��)����ʮ������̖�İ��ӣ��п��Կp���·��ϵ�LiLiPad ��Ҳ�О�Andriod�OӋ��Mega��Ҳ������A����̖UNO��߀�����µ�Leonardo����D1.1.1~1.1.4��ʾ��
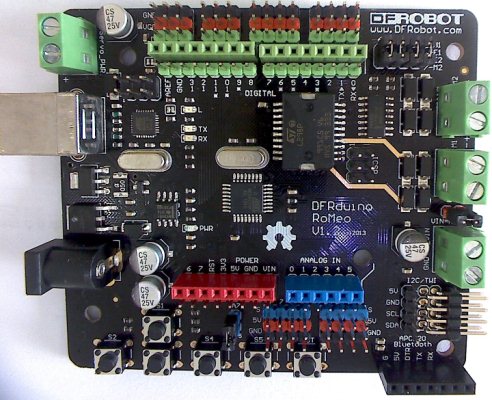
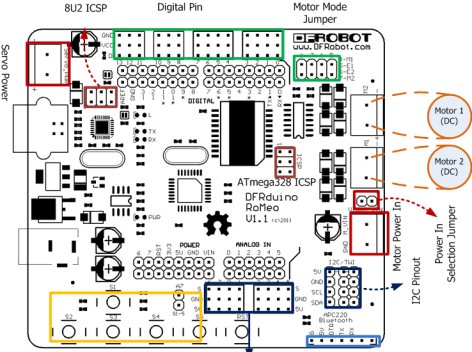
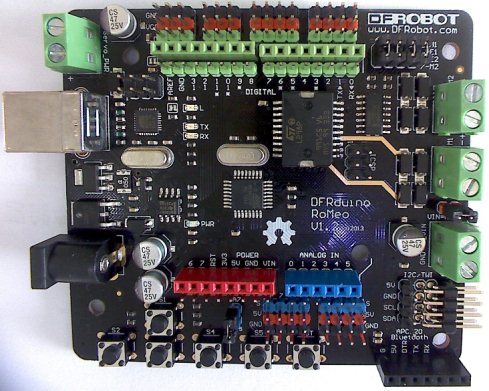
�D1.1.1 LiLyPad �D1.1.2 MEGA �D1.1.3 UNO �D1.1.4 Leonardo Arduino UNO��USBϵ�е����°汾����ͬ����ǰ�ĸ��NArduino��������������ʹ��FIDI��USB��������оƬ�����ǰ�Atmega8U2���̞�һ��USB�������D�Q����ĿǰArduino UNO�ѳɞ�Arduino���ƵĮaƷ�� 3.Arduino Romeo V1 ����ʹ�õ�Arduino����������DFRobot��Ʒ��Arduino Romeo V1����D1.1.5��ʾ��ԓ���������õ�������A�ґ�����V����UNO�忨�����^����Arduino 328���������е����Զ��Ҽ�����늙C�ӡ��I�P��IO�Uչ�塢�o����(sh��)��(j��)����ͨӍ�Ƚӿڡ������H���Լ��ݎ�����Arduinoϵ�еĂ������͔Uչ�壬���ҿ���ֱ����12����C������֮�⣬��߀�ṩ�˸������Ի��OӋ��������3P��ɫ��ᘣ��܉��������B�Ӿ�����ֹ���e�����мtɫ�����Դ����ɫ����GND���{ɫ����ģ�M�ڣ��Gɫ������(sh��)�ֿڡ� - ̎������ATmega328��
- ݔ���Դ��5V��2A��/3.3V��
- ��(sh��)��IO�_��(���У�3��5��6��9��10��11·����PWMݔ��)����(sh��)�ֿڵ�ֵ��0��1��
- ģ�Mݔ��ֵ��A0-A7��ģ�M�ڵ�ֵ��0-1023֮�g������ֵ��
- EEPROM��1KB��
- IIC��3���������Ѓɂ���90����_���^����
- �yԇ���o��5����S0-S4����
- ����o��1����RST����
- �����r犣�16MHZ��
�D1.1.5 Remeo Arduino Romeo V1�Ĺ��ܺ��B���f����D1.1.6��ʾ�� �D1.1.6 UNO�Ĺ��ܺ��B���f��
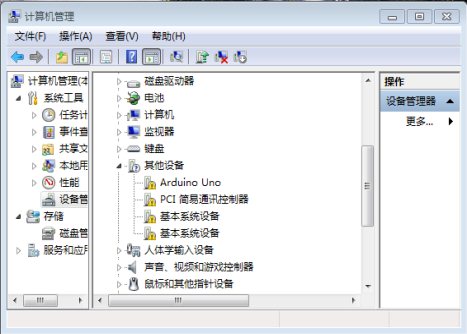
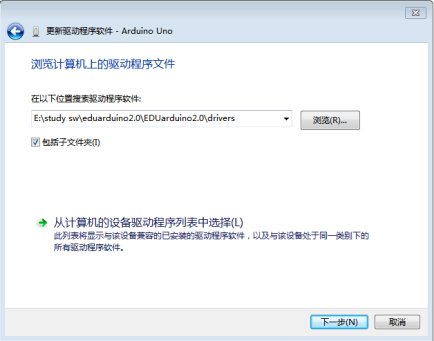
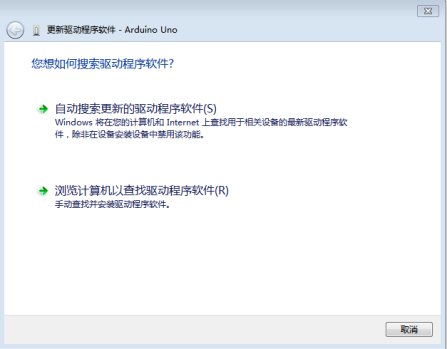
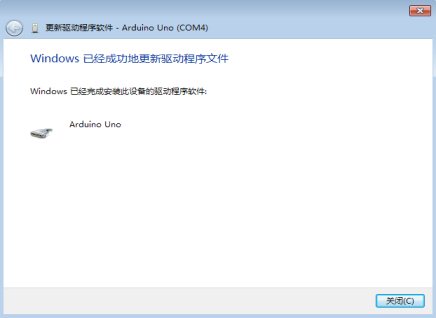
4.Arduino IDE ���b ������Arduino���_Դ���҂������L��Arduino�Ĺٷ��W(w��ng)վ�� www.Arduino.cc�������dArduino IDEܛ����ԓܛ���Á����������ς����������ϣ����d�W(w��ng)ַ�� http://Arduino.cc/en/Main/Software���@��Ҫ���Ѵ�ҵ������d�汾Ҫ�cӋ��C�IJ���ϵ�y(t��ng)��ƥ�䡣ԓܛ�����d֮�o�谲�b���≺��ʹ�ã���D1.1.7��ʾ�� �D1.1.7 �≺���Arduino IDE�ļ��б� Arduino IDE�ĭh(hu��n)�����H���ı�ʽ�ľ��̭h(hu��n)�����D1.1.8��ʾ����߀�ЈD�λ��eľʽ�ľ��̭h(hu��n)��ArduBlock���D1.1.9��ʾ�����������õľ��̭h(hu��n)���Ǻ��ߡ� �D1.1.8 Arduino IDE�_�l(f��)�h(hu��n)�� �D1.1.9 ArduBlock�_�l(f��)�h(hu��n)�� 5.Arduino �ӵİ��b Arduino��������Ӌ��C���B��һ�����USB�B�Ӿ���Ӌ��C��һ���B����Arduino����������Ҫ���b�ӣ��Ժ��ٌ�Arduino�������B����X��֮�Ͳ���Ҫ���b���ˡ��ӳ�����Arduino IDE���bĿ䛵�Drivers�ļ��A�С�������Windows 7����ϵ�y(t��ng)��������B�Ӱ��b�^�̣���D1.1.10~1.1.15��ʾ�� �D1.1.10 ���_���O������������ҵ�Arduino UNO�O��
�D1.1.11 �x�g�[Ӌ��C�Բ����ӳ���ܛ����
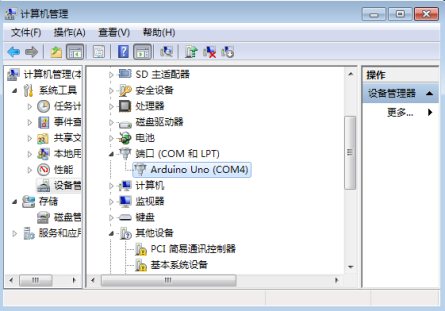
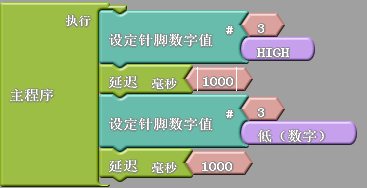
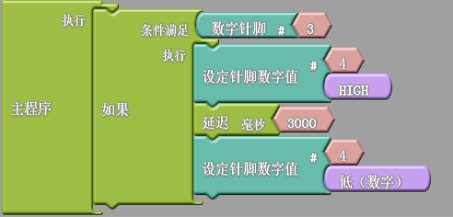
�D1.1.12 �x���ӳ���Drivers���ڵ��ļ��A �D1.1.13 ���ϵ�y(t��ng)���F(xi��n)��ȫ��ʾ���x���b�� �D1.1.14 ���b�ꮅ �ӳ����b֮���ڡ��O����������Ķ˿�һ��Ќ�����һ��COM���O�䣬Ոӛ��ԓ�˿�̖����D1.1.15��ʾ��Arduino�cӋ��Cͨ�Ŷ˿�̖��COM4�� �D1.1.15 ͨ�^�O��������鿴Arduino��COM�� ���Ҫ��Arduino�_�l(f��)�h(hu��n)�����O�������Ĵ���̖�Լ�Arduino�����̖��ע��Arduino�忨����̖��Arduino UNO�������O��Ҫ�c�O����������@ʾ��Arduino��COM��һ�£������҂��@���COM4���� 6.�w�Arduino �Ӱ��b��֮�Ϳ����_ʼArduino֮���ˡ������҂���Arduino IDE�_�l(f��)�h(hu��n)����LED�W�q��ʾ�����w�һ��Arduino�ɡ���Arduino UNO���13̖��_���ѽ�(j��ng)����һ��LED������D1.1.16��ʾ���c���ļ�����>ʾ������> Basic����>Blink���@�r������һ���ѽ�(j��ng)���d�������^(q��)��IDE�h(hu��n)�����c��  ���������ς���Arduino�������У������ς���֮������ς��ɹ�����ʾ����ҕ�����LED���ڲ�ͣ���W�q�� �D1.1.16 ��(sh��)����_13ָʾ��
�����ֲ����� ������}һ��Arduino �ӵİ��b ���b��Arduino��֮��Ҫ���_�O����������鿴�Լ���Arduino UNO�Ķ˿ڣ����ڴ��_Arduino IDE֮���Ķ˿�̖ʹ�䱣��һ�£�����֮��߀Ҫ�x��忨��Arduino UNO�� ������}�����ς�Blinkʾ�������^��F(xi��n)�� ��̽��˼���� Ոͬ�W���ϾW(w��ng)���߲�����P���Y�ϣ��˽�һ��ͨ�^Arduinoƽ�_����������Щ���������x����Ȥ����������� ��ҕҰ��չ�� Arduino�Ěvʷ Arduino�@����(j��ng)����_Դ�Ŀ���Q�����������һ�g�OӋ�WУ��Arduino�ĺ����_�l(f��)�F꠳ɆT������Massimo Banzi��David Cuartielles��Tom Igoe��Gianluca Martino��David Mellis��Nicholas Zambetti�� ��(j��)�f��Massimo Banzi�ČW������(j��ng)����Թ�Ҳ������˺��õ���������2005�궬�죬Massimo Banzi������David CuartiellesӑՓ���@�����}��David Cuartielles��һ������������Ƭ���̎������r���@���WУ���L���W�ߡ����˛Q���OӋ�Լ����·�壬��������Banzi�ČW��David Mellis���·���OӋ�����Z�ԡ������Ժ�David Mellis�͌����˳�ʽ�a�����^�����죬�·����깤�ˡ��@�K�·�屻������Arduino�����κ��ˣ���ʹ������X���̣�Ҳ����Arduino�����ܿ�Ė|�������猦�Мy�������ؑ����W�q���⣬߀�ܿ����R�_�� �S��Banzi��Cuartielles����Mellis���OӋ�D�ŵ��˾W(w��ng)�ϡ������OӋ���_��Դ�a�������෨���ԱO(ji��n)���_Դܛ�����s���y����Ӳ���ϣ������Q������Creative Commons�S�ɡ�Creative Commons��CC���Ǟ鱣�o�_�Ű���О�����F(xi��n)�����GPL��һ�N�S�ɡ���Creative Commons�S���£��κ��˶������S���a�·��ď���Ʒ��߀�������OӋ�������N��ԭ�OӋ�ď���Ʒ���㲻��Ҫ���涐����������ȡ��Arduino�F꠵��S�ɡ�Ȼ������������°l(f��)���������OӋ�������f��ԭʼArduino�F꠵�ؕ�I��������{����Ą����·�壬��������OӋ���ʹ����ͬ����Ƶ� Creative Commons�S�ɣ��Ա��C�°汾��Arduino�·��Ҳ��һ�ӵ����ɺ��_�š�Ψһ��������ֻ��Arduino�@�����֣�����ע�Գ����̘ˡ�������������@�������u�·�壬���������ܱ�횸�һ�c�̘��M�ýoArduino�ĺ����_�l(f��)�F꠳ɆT������ԅ���Arduino �Ĺٷ��W(w��ng)վ������������ҵ����N��(chu��ng)����Ʒ��Դ�a����ȻҲ�кܶ��C���ˑ��Ì������a������ֱ��늙CPWM �{�١���C���ơ������y�ࡢ�t����������E�ȣ���������ʹ�����Ռ��F(xi��n)DIY �C���˵ĉ��롣 ������(zh��n)���ҡ� ͬ�W���ѽ�(j��ng)����˽���Arduino��Ո��đ����ʹ��Arduino����������Щ�C������Ʒ��
��2�n �W�qLED�����҂��ճ��������Ҋ�����֮һ���ѽ�(j��ng)�ɞ��҂��ճ������бز����ٵ�������҂�����ͨ�^�_�P���������Ɵ������磬��ô�҂��ܷ���Arduino�팍�F(xi��n)�أ���Ό��F(xi��n)���@��(ji��)�n�҂�����Arduino�c��һ�K���� ���΄Ռ����� - ��ϤArduBlock��
- ��·��
- ����һ���W�q��LED��
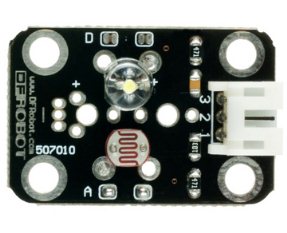
��������x�� 1.ArduBlock ArduBlock���D1.2.1��ʾ����һ���Arduino�OӋ�ĈD�λ�����ܛ������Arduino�ٷ����̭h(hu��n)���ĵ�����ܛ����Ŀǰ���������Arduino IDEܛ���\�С�ArduBlock��ʹ�ÈD�λ��eľ��ķ�ʽ���̵ģ��@�ӵķ�ʽ�ӏ��˾��̵Ŀ�ҕ���ͽ����ԣ������˾����T������ʹ�]�о��̽�(j��ng)����Ҳ���ԇLԇ�oArduino����������������֮���҂�߀���Ԍ������M����ע�� �D 1.2.1 ArduBlock���̭h(hu��n)�� �����еĸ���ģ�K���Ǐ���ȵ�ģ�K������M�����̽���ģ�Ȼ�����@Щģ�K�eľ�M��ƴ�ӣ�ƴ�ӌ��ˣ����l(f��)��һ���ǡ������������Ҫ�hȥģ�K��ֱ�ӰѲ���Ҫ��ģ�K���ϳ������̽��漴�ɡ����҂�������һ�������c�����̭h(hu��n)���Ϸ��ġ����d��Arduino�����o�����l(f��)�F(xi��n)Arduino�ı�ʽ�ľ��̭h(hu��n)���ϵġ��ς����D��Ҳ�_ʼ�����ˣ�������Arduino�ı�ʽ�ľ��̭h(hu��n)����߀�������ı�ʽ�Ĵ��a�������ς��ɹ�֮���ı�ʽ���ı��h(hu��n)���������ʾ�҂����ς��ɹ����� 2.Arduino�cLEDģ�K���B�� LED��Light Emitting Diode���l(f��)����O�ܣ���һ�N�܉�����D�����Ҋ��Ĺ̑B(t��i)�댧�w��������D1.2.2��ʾ��������ֱ�Ӱ�����D����⣬�����w�eС��������͡������ȵ͟�����ʹ�É����L�����c����Arduino�C������Ʒ�Ќ��F(xi��n)��Ч���ܵ�����x��LED�l(f��)��ģ�K���мt���G���{�ȶ�N�ɫ������ֻ���@ʾһ�N�ɫ����D1.2.3��ʾ��һ����f��LED�ӵ�Arduino�ϣ���Ҫ��(li��n)������衣 �D 1.2.2�l(f��)����O�� �D 1.2.3 LED�l(f��)��ģ�K ����ʹ�õ�LED�l(f��)��ģ�K����DFRobot��Ʒ�Ĕ�(sh��)��ʳ���~LED�l(f��)��ģ�K����D1.2.3��ʾ��ԓ�l(f��)��ģ�K����SMT��LED���O�ܺ��ڿɐ۵�PCB���ϣ�Ȼ������3P�ӿڣ��҂�ͨ�^3P����LED�l(f��)��ģ�K�嵽Arduino�Ĕ�(sh��)�ֿ��ϼ��ɡ� ������LED�l(f��)��ģ�K߀���B�ӵ�Arduino��������������������һ�������l�B�Ӿ����քe��ݔ��늉�����ע�顰+����5V����VCC���ȣ���ݔ����̖����ע�顰D����S���ȣ��Լ��ؾ�����ע�顰-����GND���ȣ����@���l���քe��Arduino�������Ĕ�(sh��)�ֿڻ���ģ�M���B�ӡ��@���l���քe�B��늉�����(sh��)�ֿڻ���ģ�M�ڡ��ء���LED�l(f��)��ģ�K�cArduino���B�Ӟ������B�ӈD��D1.2.4��ʾ�� �D1.  2.4 �������cLED�l(f��)��ģ�K�Ľ��B �Ӻþ�֮��Ҫӛס�ӵ���_̖����D�ӵ��ǔ�(sh��)����_3���@��Ҫ���Ѵ�ҵ����ڽӾ��ĕr��ɫ�ľ��Ӻ�ɫ����_����GND���tɫ�ľ��Ӽtɫ��_����VCC���Gɫ�ľ�����̖��_����D������֮�⣬��(sh��)����_0��1����Ӌ��C��Arduino֮�g��ͨ�ţ����Д�(sh��)����_0���ڽ�����̖����(sh��)����_1���ڰl(f��)����̖�������ڽӾ��ĕr��(sh��)����_0��1��Ҫ�ӡ� 3.�����W�q��LED ��(sh��)����_��ֵ��1��0�������ƽ����ƽ���҂�ʹ�õ��@��LED�l(f��)��ģ�K�����ƽ�����c��LED�������ƽ�tϨ��LED�� ���С����t��ģ�K�Ĺ�������һ��ģ�K��(zh��)�еij��m(x��)�r�g���������t1000���룬ָ������һ��ģ�K�����m(x��)��(zh��)��1000���롣 �����ֲ����� ������}һ�������W�q��LED ���˽���Arduino�����P֪�R��Ҳ��Ϥ��ArduBlock���̭h(hu��n)��֮���҂��Լ����������W�q��LED�ɡ� ���ģ�Arduino���ӡ�LED��USB��(sh��)��(j��)���� 1.Ӳ��� ͬ�W�����B��LED�l(f��)��ģ�K�cArduino�������r��Ҫע��ھ�һ���GND���t����5V�����������Ӕ�(sh��)����_��ͬ�rҪӛס�Լ��ӵ���_̖�����@�����Ѵ�Ҕ�(sh��)����_0��1��Ҫ�ӡ� �D 1.2.5 �W�qLED���� �����d����֮ǰ��Ҫ����ͬ�W���Dz鿴�Լ��İ忨�Ͷ˿�̖�Ƿ����_��ArduBlock���̭h(hu��n)������Ĕ�(sh��)����_̖�Ƿ��cLED�l(f��)��ģ�K�ӵ�Arduino�������ϵĔ�(sh��)����_̖һ�¡� ������}����ģ�M��ͨ�� �t����A��֮�������G����B��֮�������S����C��֮�������Դ���ơ� ���ģ�Arduino���ӡ�����LED��USB��(sh��)��(j��)���� 1.Ӳ��� ������LED�l(f��)��ģ�K�քe����Arduino�������Ĕ�(sh��)�ֿڣ����电(sh��)����_3��4��5�� 2.�������� �D 1.2.6ģ�M��ͨ�� ��̽��˼���� ����ѽ�(j��ng)�W���������W�q��LED�������ճ���������Щ�ط��õ���LED���@ЩLED�кι��ܣ���ʲôЧ���� ��ҕҰ��չ�� ȫ�ʵ�LED �҂�ǰ��ʹ�õ�LED�l(f��)��ģ�K���M���мt���G���{�ȶ�N�ɫ������ֻ���@ʾһ�N�ɫ���䌍��߀��һ�N��͵�LED���������@ʾ��N�ɫ���@�LED�Q��ȫ��LED��ȫ��LED�����˼t��Red�����G��Green�����{��Blue�����N�ɫ�ğ��飬����(j��)��ԭɫ��ԭ���{����N�ɫ����Ҋ��LED����Ļ���������@�Nԭ���M���{ɫ���ʬF(xi��n)��ȫ�ʵ�Ч���� 8*8 LED RGB Matrix����DFRobot��Ʒ��һ��XY�S�����⼉(li��n)����ɫȫ��LED�@ʾ���ģ�K����D1.2.6��ʾ�������������@ʾ�DƬ�����֣�֧�ֶ��D�Ӻ��D�ӵĸ��Nƽ��Ч���� �D 1.2.7 8*8 LED RGB Matrix ������(zh��n)���ҡ� ����ѽ�(j��ng)�W���������W�q��LED������߀������ЩЧ����LED����ˮ����Ч���ܷF(xi��n)��
��3�n ���o���Ƶ�LED���Ϲ�(ji��)�n�҂��ѽ�(j��ng)�W���������W�q��LED�����ó��������LED��׃���������ƵČ��F(xi��n)ֻ�ܿ���ͬ�r�g���g������F(xi��n)һЩ������W�q��ʽ���@������Щ�����ˣ����Ҍ��H���ô��������ⲿ��̖�����Ƶģ��ճ��������҂��ğ�һ����ͨ�^�_�P�����Ƶģ��҂�Ҳ���ú��εİ��o������LED�ɡ� ���΄Ռ����� - �J�R���o�����_�B���·��
- ���������o�����������_�硱��LED��
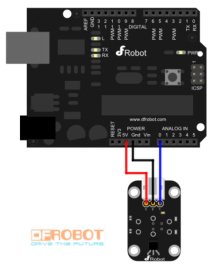
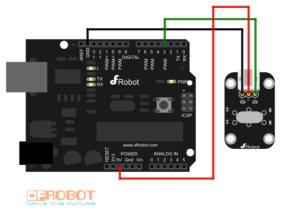
3.���������o���������ӕrһ�Εr�g���ԄӜ硱��LED�� ��������x�� 1.���o ���o��Ҳ�Q�鰴�I����һ�N���õĿ������Ԫ�������Á���ͨ����_�������·�������������С�����Ķ��_������늄әC������늚��O���\��Ŀ�ĵ�һ�N�_�P�� �҂�ʹ�õİ��o��D1.3.1��ʾ��Ҳ��������ʽ���_�P��(sh��)��ݔ��ģ�K���܉F(xi��n)�dz���Ȥ�Ļ�����Ʒ��ԓ���oģ�Kʹ�ô��o�Ӄ�(y��u)�|���Iñ��ʹ�÷���������������弴�á������o�ЃɷN��B(t��i)�������»��߷��_���҂�ʹ�õ��@��o������1��HIGH�������_��0��LOW����ע�ⲻͬ�S�����a�İ��o���ܲ�ͬ�����oģ�K�cLEDģ�Kһ�ӣ�Ҳ�ǽ�Arduino�������Ĕ�(sh��)�ֿڣ�ͨ���ھ���GND���t����5V���G���Ӕ�(sh��)����_��
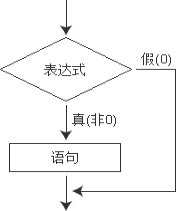
�D1.3.1 ���o 2.�x��Y��--������� ���҂���Ҫ�Д�ijЩ�Y����Q���Ƿ�Ҫ��(zh��)�в�ͬ�ij���r���x���ԽY����һ���ܷ���ĽY�����Д�Y���Q���Ƿ��(zh��)�ЃȲ��ij����x�����Z����Д��С�������͡��������t�����ڳ����У��������ώN�Y�����������(j��)��ͬ�ėl���x��(zh��)�в�ͬ�ij���Ƭ�Σ����_�ɲ�ͬ��Ŀ�ġ��@��(ji��)�n�҂���Ҫ��W���������ģ�K�� �x��Y����������Ļ�����ʽ�� �D1.3.2 �x��Y����������� ���Z�x�ǣ�����l���M�㼴ֵ���棬�t��(zh��)��ģ�K�����Z�䣬��t����(zh��)��ԓ�Z�䡣���^�̿ɱ�ʾ��D1.3.3�������Д��l���ȿ������Pϵ�\��Ҳ������߉�\�㡣 �D1.3.3 �x��Y��
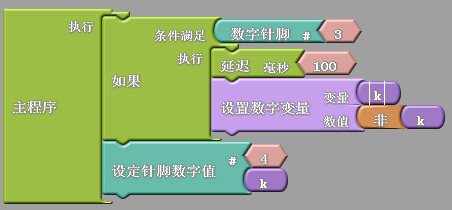
��1�����ܣ��xȡָ����(sh��)����_��ݔ��ֵ�� ��2������(sh��)����Ҫ�xȡݔ��ֵ����_̖�� ��3��������  ���x���xȡ��(sh��)����_3��ֵ�� �����ֲ����� ���}һ�����������o�����������_�硱��LED 1.Ӳ��� �B���·�r�����oģ�K�cLEDģ�Kһ�ӣ���Ҫ�ӵ���(sh��)�ֿڡ� ���ģ�Arduino ��������LEDģ�K�����oģ�K�Լ�USB��(sh��)��(j��)���� 2.�������� �D1.3.4 ���o�����������_���LED
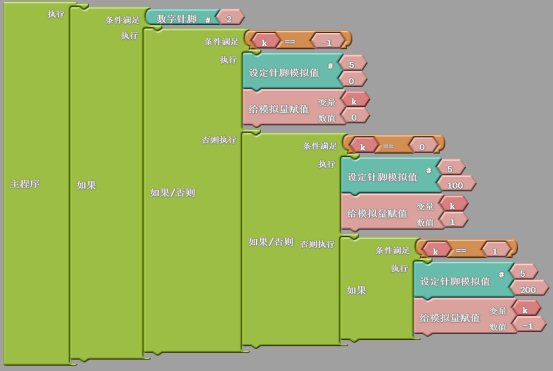
���}�������������o���������ӕrһ�Εr�g���Ԅ��P�]����LED 1.����� ��1��������ğ�������֮���^һ���Ԅ��P�]�ˡ� ��2���Ї����|��W�W���l(f��)����Ͷ��ʽ�_������Ӳ��Ͷ���_���µă�����Еr���_������_ʼ��������С�r���Ԅ�Ϩ�硣 2.�������� �D1.3.5 ���o���������ӕrһ�Εr�g���Ԅ��P�]��LED ��̽��˼���� �������ϰ��o����LED�����Ч����߀�����ð��o����LED���F(xi��n)��ЩЧ���� ��ҕҰ��չ�� �����_�P һ����_�P��ǰ���B�İ��oֻ�ЃɷN��B(t��i)�����»��߷��_������f��Ҫݔ��������B(t��i)��Ԓ���҂�߀��Ҫ�ٽӎׂ����o��Arduino���������棬�������_�P���ж�N��B(t��i)����DFRobot��Ʒ�IJ����_�P��������D1.3.6��ʾ��ԓģ�K�����_�P��һ�Nͨ�^���D���{����̖ݔ�����_�P����ֻ��Ҫһ��ģ�M�ھ����xȡ12����B(t��i)�����(ji��)ʡ��������(sh��)�ֶ˿ڡ������@����_�P�߂�12���nλ��ÿ���nλ߅�϶���LED�@ʾ���a���ſ�ğ���Ч�����҂����Ԍ��r�˽�nλ�Ġ�B(t��i)���dz����㡣 �D1.3.6 �����_�P ������(zh��n)���ҡ� Ոͬ�W���Lԇ���F(xi��n)���o����LED�����ٰ���LED�硣 ��4�n ���İ��o һ����f��������ğ�����ͨ�^�_�P�����Ƶģ��������_���ٰ����P����ô�ܷ���Arduino���F(xi��n)�أ��@��(ji��)�n�҂�һ����W���ð��o�_�P���F(xi��n)�����_���ٰ����P��LEDЧ���� ���΄Ռ����� 1.���ղ�����ͺ�׃���� 2.���������o�����_���ٰ����P����LED�� ��������x�� �ھ����^����׃���ͳ����ǻ����Ĕ�(sh��)��(j��)������������Ҫ�c���N��(sh��)��(j��)�������R�_���ٶȡ��ȴ��ĕr�g�ȣ��@����Ҫ�漰��׃���ͳ����ˡ� ����ָ���dz������\���^���У���ֵ���ܸ�׃�Ĕ�(sh��)��(j��)����D1.4.1��ʾ�����г����֞锵(sh��)�ֳ������ַ��������ַ��������ȡ� 
�D1.4.1 ArduBlock�h(hu��n)���еij��� ׃����ָ�ڳ������Á����픵(sh��)��(j��)���ַ����@Щ�ַ���ֵ�ǿ���׃���ģ�����׃���ж�N��ͣ��电(sh��)��׃����ģ�M׃�����ַ�׃���ȵȡ�ArduBlock�h(hu��n)���еIJ���׃�����D1.4.2��ʾ�� 
�D1.4.2 ׃�� 2.������� ������ͣ�bool�����ڱ�ʾ��/�١�ԓ��͵�׃��ֵֻ����0����1���oՓ�x���κη���ֵ�oԓ��͵�׃��������ֵ��ֻ����1�� ��4-1 �������
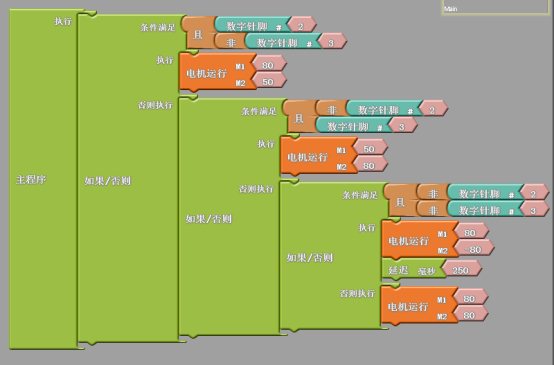
3.���\��� �\����Ǹ��V���g�����(zh��)���ض����g��߉�����ķ�̖���\�����Ҫ�֞���������g�\����� �Pϵ�\����c߉�\�������λ�\������҂��@��(ji��)�n��Ҫ��W��߉�\�������ķ��\�㡣 ���\���dž�Ŀ��̖�\���һ�N�����^��Ŀ�\�������ֻ����Ҫһ��������(sh��)���\��������\��ķ�̖�ǡ�����������˼����ȡ�c���_ʽ�෴��ֵ�������_ʽֵ���棬�t߉���\��Y����١�����  �������(sh��)����_��ֵ��0����0����1���棻�෴�����(sh��)����_��ֵ��1����1����0���١� 4.���o���� ͨ���İ��I�����_�P��Cе�����_�P�����Cе�|�c���_���]�ϕr�����ڙCе�|�c�ď������ã�һ�����I�_�P���]�ϕr�����R�Ϸ�(w��n)���ؽ�ͨ���ڔ��_�rҲ����һ���Ӕ��_��������]�ϼ����_��˲�g�����S��һ�B���Ķ��ӣ����˲��a���@�N�F(xi��n)������Ĵ�ʩ���ǰ��I����������ε������������Ǽ����ӕr�� �����ֲ����� ������}�����������o�����_���ٰ����P����LED�� 1.Ӳ��� �·���B�Ӹ��Ϲ�(ji��)�nһ�ӣ��@��߀��Ҫ�e���{һ���҂��İ��oģ�K�Ӕ�(sh��)�ֿڣ����Һھ���GND���t����5V��������������̖��_���ڽӺ��·֮��Ҫӛס�Լ��ӵ����Ă���(sh��)�ֿڡ� ���ģ�Arduino Romeo�����������o��LED�l(f��)��ģ�K�Լ���(sh��)��(j��)���� 2.��������һ �D1.4.3 ���o�����_���ٰ����P��LED ��������� ��ʾ����������������ӕr�� ���������� ��ʾ���������������˃ɂ��ӕr�����ºͷ��_�������ӕr��ͬ�r���ˮ�ѭ�h(hu��n)�� ��̽��˼���� - Ոͬ�W�����d�����м��^��LED�ķ�(w��n)������Σ���ጞ�ʲô���F(xi��n)�@�N�F(xi��n)�������Q��
- ˼��һ�����o����LED��߀����Щ��r��
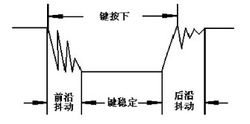
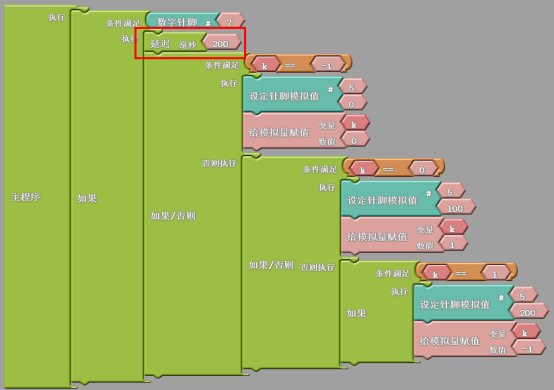
��ҕҰ��չ�� ͨ���İ��I�����_�P��Cе�����_�P�����Cе�|�c���_���]�ϕr�����ڙCе�|�c�ď������ã�һ�����I�_�P���]�ϕr�����R�Ϸ�(w��n)���ؽ�ͨ���ڔ��_�rҲ����һ���Ӕ��_��������]�ϼ����_��˲�g�����S��һ�B���Ķ��ӣ����˲��a���@�N�F(xi��n)������Ĵ�ʩ���ǰ��I��������D1.4.4��ʾ�� ���ӕr�g���L���ɰ��I�ęCе���ԛQ����һ���5ms��10ms���@��һ������Ҫ�ĕr�g����(sh��)���ںܶ����϶�Ҫ�õ��� �D1.4.4 ���I����
���I��(w��n)���]�ϕr�g���L�̄t���ɲ����ˆT�İ��I�����Q���ģ�һ������c��������(sh��)�롣�I���ӕ�����һ�ΰ��I���`�x��Ρ���_��CPU���I��һ���]�σH��һ��̎�������ȥ���I���ӡ����I�]�Ϸ�(w��n)���r�xȡ�I�Ġ�B(t��i)�����ұ���Єe���Iጷŷ�(w��n)��������̎���� �����Ǟ��˱����ڰ��I���»���̧��r�ƽ���Ҷ��ӎ�����Ӱ푡����I������������Ӳ����ܛ���ɷN������һ����f���҂���ʹ��ܛ������ȥ�������z�y���I�]�Ϻ��(zh��)��һ���ӕr����5ms��10ms���ӕr��ǰ�ض�����ʧ����һ�Ιz�y�I�Ġ�B(t��i)������Ա����]�Ϡ�B(t��i)�ƽ���t�_�J���������I���¡����z�y�����Iጷź�ҲҪ�o5ms��10ms���ӕr�������ض�����ʧ������D��ԓ�I��̎������ ܛ�������ķ����Dz����z�y���Iֵ��ֱ�����Iֵ��(w��n)�������F(xi��n)���������Oδ���I�rݔ��1�����I��ݔ���0�����ӕr���������������z�y���z�y�����Iݔ���0֮���ӕr5ms��10ms���ٴΙz�y��������I߀��0����ô���J���а��Iݔ�롣�ӕr��5ms��10msǡ�ñ��_�˶����ڡ� ������(zh��n)���ҡ� - ˼���ܷ���ģ�M׃�����F(xi��n)���o����LED�����ٰ���LED�磿
- �ɂ����o����LED������ЩЧ����˼�����Lԇ���F(xi��n)��
��5�n ��������ǰ��Č������У��҂�������Arduino������������LED����������׃�������Dz��]���w�F(xi��n)LED��늉��ɸߵ��ͻ����ɵ͵��ߵ�׃���������g�^�̛]�еõ��w�F(xi��n)�����ЕrҪ�У�������KTV���ݳ����ϣ������_���ܺõğ���Ч�����ЕrҪʹ���������u׃�����ǂ��B�m(x��)׃�����^�̡����҂��ܷF(xi��n)�أ� ���΄Ռ����� - ����PWM��
- ����ģ�Mݔ����
- ���ծ�ѭ�h(hu��n)��
��������x�� 1.������ �����������˼�x�����ǟ�������X����֮�����������������u׃�������X�����ں������V���������֙C֮�ϣ����ɞ����Ʒ���¿��֙C���u�c֮һ���������֙C������δ̎����֪ͨ�������fδ�Ӂ�늣�δ���յĶ��ŵȵȣ��������͕��ɰ�������׃���������һ����ô�й�(ji��)�࣬��һ��֪ͨ���ѵ����á� 2.PWM �F(xi��n)�����(sh��)ϵ�y(t��ng)�Բ��Ô�(sh��)�ֿ��Ƶķ�ʽ���ɺ���̎�������ջ��ĸМy��Ϣ����ᘌ��cĿ�˵IJ�ֵ���{��ݔ��������(sh��)����ֻ̖��0�c1�ɷN׃������ô�{��ݔ��ֵ�Ĵ�С�M�������أ��@�r�҂����Ԍ���(sh��)����̖�D����ģ�M��̖���@����Ҫ�҂���PWM�ˡ� �}�_�����{��(PWM)����Ӣ�ġ�Pulse Width Modulation���Ŀs�������Q�}���{�ƣ�������̎�����Ĕ�(sh��)��ݔ���팦ģ�M�·�M�п��Ƶ�һ�N�dz���Ч�ļ��g���V�������ڏĜy����ͨ�ŵ����ʿ����c׃�Q���S���I���У������Ԍ���(sh��)����̖�D����ģ�M��̖�� Arduino Romeo�������Ĕ�(sh��)�ֿ�����6����_֧��PWM��̖����3��5��6��9��10��11��PWM��ݔ��ֵ��0~255��LED�l(f��)��ģ�K�ӵ��@�ׂ���_���棬�Ϳ��Կ���LED�����ȣ�����ֻ�Іμ���������ɷN�x���@��Ҫע�����LED�l(f��)��ģ�K�ǿ����{���ȵģ���ЩLED�l(f��)��ģ�K�����{��(ji��)���ȣ���������@����_���棬Ҳ�o������LED�����ȡ������õ�LED�l(f��)��ģ�K�ǿ����{��(ji��)���ȵġ� 3.ģ�M��_��ݔ�� - ���ܣ���ָ����ֵ�oģ�M�ڡ�
- ����(sh��)��Pin����Ҫݔ��ֵ����_̖��Value��ȡֵ��0~255֮�g������ֵ��
��3��������  ��˼���nj�ģ�M��_3��ֵ�O����255�� ǰ���B���x��Y��ֻ���Д�һ�Σ�ֻ�г������������^�r���ŕ��ٴ��Дࡣ��ijЩ��r��߀��Ҫ�l���M��ĕr����؏͈�(zh��)��ijЩ�Z�䣬�@����Ҫѭ�h(hu��n)�͵Ŀ����Z�����؏�ѭ�h(hu��n)��ѭ�h(hu��n)�ˡ� ��ѭ�h(hu��n)�Ļ�����ʽ�� �������������l�����������棨1���ĕr��(zh��)��ѭ�h(hu��n)�w�ȵ��Z�䣬��ѭ�h(hu��n)�w���؏͈�(zh��)�У����l���������ĕr��٣�0���r������ѭ�h(hu��n)�w���Y��ѭ�h(hu��n)������l��ʼ�K�������t���M����ѭ�h(hu��n)��ѭ�h(hu��n)�wһֱ��(zh��)����ȥ�� �����ֲ����� ������}һ����(sh��)ֵ����LED���� 1.Ӳ��� ���B���·�r��LEDģ�KҪ�ӵ���(sh��)�ֿ�֧��PWM��̖����_�ϣ���3��5��6��9��10����11�� ���ģ�Arduino Romeo��������LED�l(f��)��ģ�K�Լ���(sh��)��(j��)���� 2.�������� ������}��������������
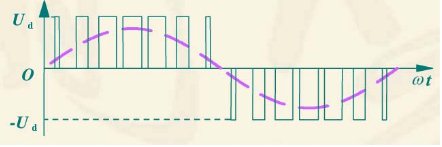
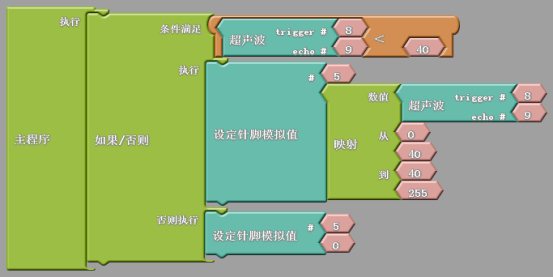
�D1.5.1 ���������� ��̽��˼���� 1.�ܷ��ð��o����LED��������r����Ό��F(xi��n)�� 2.���ʹ�×l���Z�������������� 3.߀����������ЩЧ����LED�� ��ҕҰ��չ�� PWM���}���{�ƣ���ͨ�^һϵ���}�_�Č������{�ƣ�����ƣ�����Ч�õ�����Ҫ�IJ��Σ������Π�ͷ�ֵ������D1.5.2��ʾ���ۂ�����ͨ�^�ܶ��}�_���֏͵õ����Ҳ��Ρ��@Ҳ���ԏĸ������W�e�ֵ���e��Ч��ԭ����ጡ������1���}�_��������e�����ڵ�һ���}�_ǰ�����Ҳ��·��ɵ���e��ͨ�^��׃������ռ�ձȣ��Ϳ��Ը�׃��Ч��ݔ��늉����Ρ�ԇ��һ�£����ÿ���}�_�Č�����ȣ��t����Ч�IJ��Ξ�һ�lֱ��������ֱ��늉���̖��PWM�{�ƏV�������c늙C�{�ٺ��y�T�����С�����F(xi��n)�ڵ�늄�܇����ͨ�^PWM�{�ٵġ� �D1.5.2 PWM 2.��(sh��)����̖��ģ�M��̖ ��(sh��)����̖����ָ����ȡֵ�xɢ�ģ���ֵ���������������ȣ�����M�ƴa����һ�N�xɢ��̖�������c�ǿ��ɔ_�����������ڔ�(sh��)����̖̎�����F(xi��n)�ںܶ���̖�����϶��ǔ�(sh��)����̖�����֙C��̖��Ӌ��C̎����Ϣ�ȵȡ� ģ�M��̖����ָ����̖�������B�m(x��)׃���ģ��ۂ������������˲�gȡֵ������ģ�M��̖���ܸɔ_Ӱ푣�������̎����һ�㶼���Ȍ�ģ�M��̖�xɢ�ɔ�(sh��)����̖���Ա�̎�������ߵą^(q��)�e��D1.5.4��ʾ�� �D1.5.4 A/D�^(q��)�e ������(zh��n)���ҡ� ǰ���҂��ѽ�(j��ng)�W�^���ð��o����LED�����磬Ոͬ�W���Lԇ�ð��o���ƺ�������
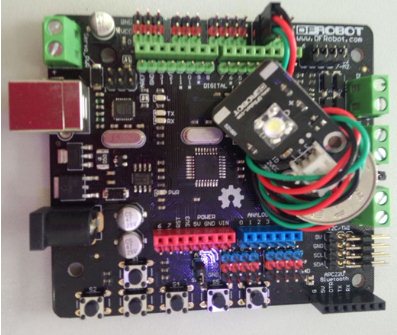
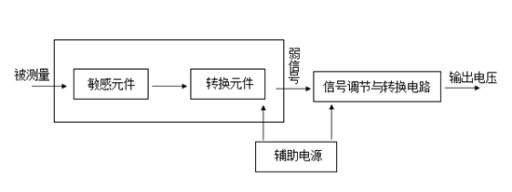
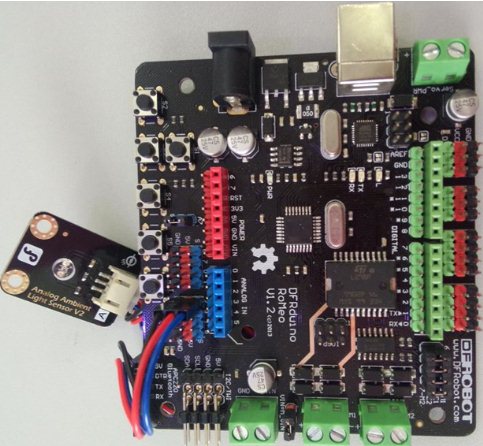
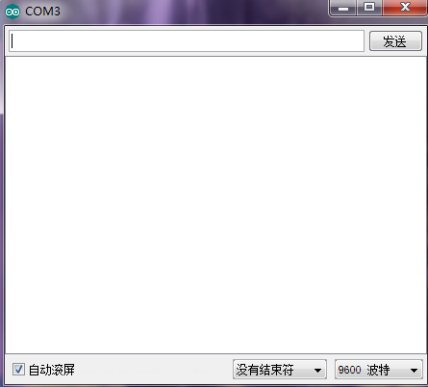
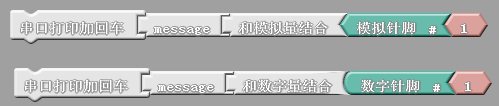
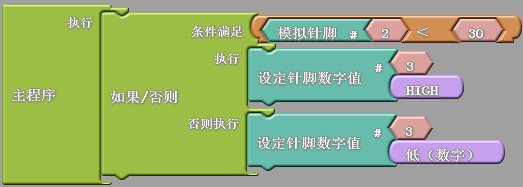
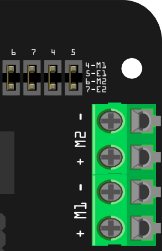
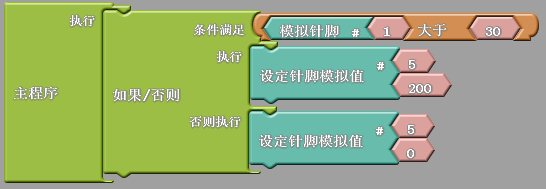
��6�n ���LED ��ȻArduino�܉�ݔ��ģ�M��늉�����ôArduino�ܲ��ܸ�֪�����ģ�M����̖�أ��������⾀����Ϣ���@Щ����Ҫ�õ��҂��Ă������ˡ��@��(ji��)�n�҂��́�W�����Â�������֪������Ϣ������LED�� ���΄Ռ����� 2.�܉����_�B�ӂ������������Â�������Ϣ�M�������Ŀ��ƣ� 3.���մ��ڱO(ji��n)ҕ����ʹ�á� ��������x�� 1.������ ��������һ�N�����b�û��������٣��܉�̽�y������������̖������l������⡢�ᡢ��ȣ��W�M�ɣ��矟�F��������֪̽����Ϣ���f�o�����b�û����١�������һ��������Ԫ�����D�Q���� ���D�Q�·�������ֽM�ɣ�ͨ�^����Ԫ���@ȡ�����Ϣ���D�Q�����̖ݔ����Ȼ���ɿ������M�з���̎������D1.6.1��ʾ�� �D 1.6.1 �������Y�� ���ԏIJ�ͬ�ľS�Ȍ��������M�з���@���҂�ֻ��B����ݔ����̖��˜ʌ��������M�з�����Է֞飺 ģ�M���������������y���ķ�늌W���D�Q��ģ�M���̖��������������⾀�������ȡ� ��(sh��)�ւ��������������y���ķ�늌W���D�Q�ɔ�(sh��)��ݔ����̖(����ֱ�Ӻ��g���D�Q)���猤����������������������ȡ� �_�P������������һ�����y������̖�_��ij���ض����ֵ�r��������������ݔ��һ���O���ĵ��ƽ����ƽ��̖���簴�o�� �����_�P�������Լ���(sh��)�ւ������y(t��ng)�Q�锵(sh��)�ւ������� 2.�⾀������ �⾀������Ҳ�Q�h(hu��n)���⾀������������ʹ�õĹ⾀����������DFRobot��Ʒ��ģ�M�h(hu��n)���⾀����������D1.6.2��ʾ��ԓ������ģ�K�����Á팦�h(hu��n)���⾀�ď����M�Йz�y��ͨ���Á������S�⾀����׃���a������Ч���Ļ�����Ʒ�� �D1.6.2 �⾀������ �⾀��������һ�Nģ�M����������Ҫ�ӵ�Arduino Romeo���ư��ģ�M���ϣ�ֵ�ķ�����0~1023���⾀�����IJ�ͬ��ݔ����ͬ��ֵ���⾀Խ����(sh��)ֵԽ�⾀Խ����(sh��)ֵԽС���⾀�������ڽӾ��r��Ҳ�Ǻھ���GND���t����5V������������ģ�M��_���⾀�������cArduino Romeo���������B��ʾ��D����D1.6.3��ʾ�� �D1.6.3 �⾀�������cArduino���B�� 3.���ڱO(ji��n)ҕ�� �⾀���������ԙz�y��ǰ�h(hu��n)���Ĺ⾀ֵ���ǹ⾀ֵ�����Ƕ����أ��@����Ҫ�õ����ڱO(ji��n)ҕ���ˡ�ArduBlock�_�l(f��)�h(hu��n)���µ�  �����ڱO(ji��n)ҕ�����Á��O(ji��n)�ش��ڵ�ͨӍ��r���Γ����ڱO(ji��n)ҕ�����o���F(xi��n)�������D1.6.4��ʾ�Ĵ��ڡ� ���ڱO(ji��n)ҕ�������@ʾ��Arduino Romeo �������l(f��)���Ĕ�(sh��)��(j��)������⾀�����������������ֵ�ȡ�Serial Monitor�����ڱO(ji��n)ҕ�����Ƿdz����õĹ��ߣ��e�����{ԇ����r�� �D1.6.4 ���ڱO(ji��n)ҕ�� ����ݔ��Ҫ�õ�  �����wʹ�÷�����D1.6.5��ʾ�� �D1.6.5 ����ݔ����_ֵ �@��Ҫ���Ѵ�ҵ������еġ�message��ģ�K���пɟo�����ҡ�message��ģ�K�����message���ԸĞ��������ַ���������҂�Ҫݔ����ģ�M��������ֵ���҂�Ҫ�x��ģ�M���Y�ϡ�ģ�K������ǔ�(sh��)�ւ���������LED�l(f��)��ģ�K��ֵ���҂�Ҫ�x�͔�(sh��)�����Y�ϡ�ģ�K�����Д�(sh��)����_����ģ�M��_�Q���҂�����������LED�l(f��)��ģ�K����_ֵ�� �����ֲ����� ������}һ���xȡ�⾀��������ֵ 1.Ӳ��� �⾀������ģ�KҪ�ӵ�Arduino������ģ�M���ϡ� ���ģ�Arduino Romeo��������USB�����⾀�������� 2.�������� �D1.6.6 ����ݔ���⾀��������ֵ ������}�����������LED 1.��Ʒ���� ����⾀����LED�c������tLEDϨ�硣 2.Ӳ��� �⾀������ģ�KҪ�ӵ�Arduino������ģ�M��_�ϣ�LED�l(f��)��ģ�K�ӵ�Arduino�������Ĕ�(sh��)����_�ϡ� ���ģ�Arduino Romeo��������USB�����⾀�������Լ�LED�l(f��)��ģ�K�� 3.�������� �D1.6.7 ���LED ��ʾ��������30�ǹ⾀���ĕr���������ֵ����ͬ�Ĺ⾀��������(sh��)ֵ�Dz�һ�ӵģ���Ҫ����(j��)���w�������M���ġ�
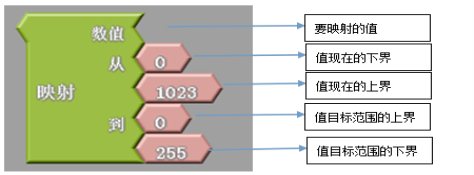
��̽��˼���� ���ù⾀������߀���Ԍ��F(xi��n)��ЩЧ����LED���⾀������߀���Կ�����Щ�|�����ܲ�����������Ч����LED�� ��ҕҰ��չ�� ӳ�� ArduBlock���̭h(hu��n)������һ����ӳ�䡿ģ�K��ԓģ�K���Ԍ�һ�������ȵ�һ��ֵ�D������һ�������ȵ�ֵ�����溆�ν�Bһ��ԓģ�K��ʹ�á�
����o����e�����ε����ӣ������f0~100֮�g��20�����D����0~10֮�g��2��  �@��(ji��)�n�҂����F(xi��n)�˹��LED�����⾀��LED�����⾀��LED�磻�҂�Ҳ֪���˹⾀��������ֵ��0~1023����LED�����Ȟ�0~255����ô�ܷ����(j��)�⾀�⾀�ď�������LED�������أ�������ӳ�䌍�F(xi��n)�� ������(zh��n)���ҡ� �҂��ѽ�(j��ng)�W�����ð��o���߂���������LED�������������Ոͬ�W�����룬�҂�߀����������Щ�Є�(chu��ng)���LED��߀������Щ�����������҂���LED��
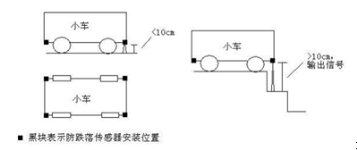
��7�n LED�C�τ�(chu��ng)��ͨ�^ǰ���(ji��)�n�ČW�����҂��ѽ�(j��ng)�˽Ⲣ�W�������ð��o���߂�����������LED�������Լ�������r�����҂�һ���OӋ���_�l(f��)���^���У�ͬ�W���Л]�Юa��һЩ��(chu��ng)����뷨�أ��@��(ji��)�n�҂��́�����һЩ�Є�(chu��ng)���LED�� ���΄Ռ����� 1.��Ϥ���������������������� 2.�OӋ���Lԇ���F(xi��n)һ����(chu��ng)���LED��Ʒ�� ��������x�� 1.������� �������õ����������ʹ�õ���DFrobot��Ʒ��ģ�M�����������D1.7.1��ʾ���@��һ��Ρ����ݵ���Ӷ��䣬�������Á팦�܇��h(hu��n)�������M�Йz�y�����D����ģ�M��̖���z�y�������cݔ��늉������ȣ���ͨ���Á�����һЩ�c�����P�ęC������Ʒ������ �����c��LED���ӕrһ�Εr�gLED�Ԅ��P�]��ԓ������ģ�K�ĽӾ��c�⾀������ģ�K�ĽӾ���ͬ��ͬ�ӽӵ���ģ�M�ڡ� �D1.7.1 ������� 2.����������� ����ʹ�õĔ�(sh��)�ַ����������ģ�K�������յļt��y��ģ�K����D1.7.2��ʾ��ԓģ�Kݔ���Ĕ�(sh��)����̖����Ч���x10cm�����z�y��10cm�����ϵK��r��ݔ�����ƽ�����]�Йz�y���ϵK��r��ݔ�����ƽ��ԓģ�KҲ��������_���Ӿ������cLED�l(f��)��ģ�Kһ�ӣ��tɫ��VCC����ɫ��GND�����������Ӕ�(sh��)����_��ͬ�ӣ�ʹ��ԓ������Ҳ��������һЩ��(chu��ng)��ęC������Ʒ������ʹ�Ãɂ���������������������քݿ���LED�������քݏ������c��LED���քݏ��ҵ���Ϩ��LED�� �D1.7.2 ��(sh��)�ַ����������
�����ֲ����� ������}һ���؟��� ����LED������ ����LED�磩 1.Ӳ��� ���B���·�r���������ģ�KҪ�ӵ�ģ�M�����棬LED�l(f��)��ģ�K�ӵ���(sh��)�ֿڡ� ���ģ�Arduino Romeo ��������USB������������Լ�LEDģ�K�� 2.�������� �D1.7.4 ��LED ������}���������քݿ���LED 1.Ӳ��� �ڴӲ���r���ɂ���(sh��)�ַ�����������Լ�LED�l(f��)��ģ�K�ӵ���(sh��)�ֿ����档 ���ģ�Arduino Romeo ��������USB�����ɂ���(sh��)�ַ�����������Լ�LEDģ�K�� 2.�������� �D1.7.4 �քݿ���LED ������}����������(chu��ng)���LED ��̽��˼���� ͬ�W�����ཻ�Q�Լ��Ą�(chu��ng)��LED������u�r�� ��ҕҰ��չ�� �L���ӵ�LED·�� �@��һ����Ա��L�ӵ�LED·������D1.7.5��ʾ������ğ�����������Ƭ�����гɈAͲ�ͣ��c�����c�҂����y(t��ng)�����R�����ƣ������g���ǵ��ܺĵ�LED����ֻҪ�L���_��1.5��/��Ϳ��Ա��c����LED���ʲ���s������������ą^(q��)�� ����ֻҪ���L�D�ӟ��֣�LED·�����܌��L���D������܃�����������ͬ�丼�����R������LED���c���������ϡ��@�������L�ܵ�LED·���L�ܰl(f��)늲����cLED·���������ڞ�һ�w�����ζ����ã�������Ƭ�����D�ӕr���⾀��Ч��Ҳ�Ǻܪ��صġ��o���~���늾W(w��ng)����c���ƣ����{ɫ��LED·���܉�ܺõ�������Ȼ�h(hu��n)�������İ��ĭh(hu��n)������˂��ṩһ���������غ� �D1.7.5 �L���ӵ�LED·��
ֱ������ָ�ƿص�LED�� �F(xi��n)���������҂����T���_�P�����Ɵ�����P�]���������ȣ��F(xi��n)�ڽ�B����һ����Ԏ��|�������ܿ��Ɵ����̶ȵ�LED�_������D1.7.6��ʾ�����S�@�ӿ���_�������F(xi��n)��ij�����µĕ��ɣ�������Ϸ�����ָ�p�|�Б�����ָ��ȵľ��x��LED���⏊���M�п��ƣ��P�]����ķ�ʽ��Ѹ�ل��^��塣 �D1.7.6 ��ָ�ƿص�LED ������(zh��n)���ҡ� ͬ�W����һ���҂�߀����������Щ�Є�(chu��ng)���LED���҂��OӋ��LED߀����Щ�ط���Ҫ���M��
�ڶ��� �����L��
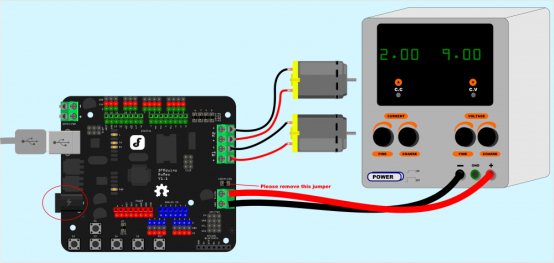
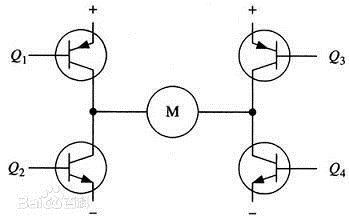
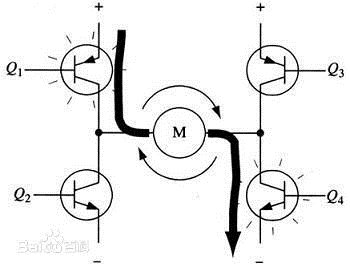
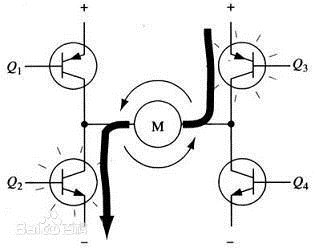
��1�n ���L���L�����҂������г�Ҋ�ļ������������ͨ�^ֱ��늙C�������~�D�ӵģ�������Arduino�����L�Ȇ��ο����أ����@��(ji��)�n��҂���������Arduino����ֱ��늙C�ķ�ʽ�Լ��������L�ȡ� ���΄Ռ����� 1. Romeo����ֱ��늙C�� 2. �������L�ȡ� ��������x�� 1.Romeo����ֱ��늙C Romeo���������H�^��Arduino328���������е����ԣ����Ҽ�����늙C�ӡ����o��IO�Uչ�塢�o����(sh��)��(j��)����ͨӍ�Ƚӿڡ����ڱ���(ji��)�n��Ҫ�õ����ǎ����L�ȵ�늙C���@�����Ҫ�v��һ��Romeo��ֱ��늙C�Ŀ��ơ� ����LED�nj�LEDģ�Kֱ���B�ӵ���(sh��)����_����ô�����L���Dz���Ҳ��늙Cֱ���B�ӵ���(sh��)����_�أ���Ȼ���ǣ������_ֱ��ݔ�������̫С���o������늙C�D�ӣ�������Ҫ���T��늙Cݔ������Romeo���L298�ӡ� Romeo��늙C���������������������늙C������_�锵(sh��)�ֿ�4��5��6��7���ε�������ጷŔ�(sh��)�ֿڣ�늙C�������������á��Ӿ��D��2.1.1��ʾ���B��늙C�ĵط�׃ʽ늙C��ģ�K�����⣬Romeo����ʹ������Դ��Ҳ�ɲ�ʹ�ã�ͨ�^�������ơ� �D2.1.1 늙C�Ӿ��D Romeo����늙C�ЃɷNģʽ��PWMģʽ��PLLģʽ���@���҂��õ�����PWMģʽ��PLLģʽ��ҕҰ��չ�Е��н�B��ͨ�^��׃�ɂ���(sh��)��IO��_�̓ɂ�PWM��_��PWM��ֱ��늄әC���ƶ˿ڌ��F(xi��n)�����2.1.1��PWM����ģʽ����_���䣬�D2.1.2�nj����Č�����У�M1��늙C1��M2��늙C2�� ��2.1.1 PWM��_���� �D2.1.2 PWM����ģʽ 2.ģ�M������� ģ�M��������ڵ�һ���M���˺��εĽ�B���@���پ��w��Bһ�¡�����һ��Ρ����ݵ���Ӷ��䣬���ܡ� �������Ĵ�С�����D����ģ�M��̖��ͨ�^ģ�M����늉���̖�Ĵ�Сֵ�w�F(xi��n)�h(hu��n)�����Ĵ�С��Ҫһ�����ε�3о��(sh��)��(j��)�����܌����B�ӵ������X��Arduino��������Arduino�ڡ� ������ͬ�����������������O���ķ��������ǻ��������L�����z�y�Ă����������Á팦�܇��h(hu��n)���е����M�Йz�y������300���ķŴ�����ݔ��ģ�M��̖��ʹ��3.3V��5V�����AD�ɼ��������Á팍�F(xi��n)����(j��)����С�M�л��ӵ�Ч���������ؙC���ˡ����_�P���؈ȡ�������D2.1.3��ʾ���Ӿ��rע���B��ģ�M��_�� �D2.1.3 ģ�M������� �����ֲ����� ������}�������ҵ����L�� ͬ�W�����˽������P��֪�R�����Լ��������n�����L���ˣ��҂��õ���������Ҫ��Romeo���ӡ�ģ�M����������L�ȣ���ֱ��늙C���� 1.Ӳ��������L�ȵ��B�ӣ� ���B�������·�r����Ҫע�⣺ģ�M��������ӵ�ģ�M�ڣ������У��������B�ӵ���ģ�M��1��늙C�ӵ���M1�Ӿ������� ��1���xȡģ�M���������ֵ �D2.1.4 �xȡģ�M���������ֵ ��2�����L�� �D2.1.5 ���L�� ��̽��˼���� Ոͬ�W��ӑՓһ�£������������L�ȿ������������أ���Щ�ط�Ҳ�õ��������ƣ� ��ҕҰ��չ�� 1.ֱ��늙C�Ŀ��Ʒ�ʽ ֱ��늙C�nj�ֱ������D�Q�əCе�ܵ��b�ã���Ŀǰ������V����һ�N�C����������������Ч�ʸߡ��{�����ܺú������D�ش�����c��ֱ��늙C���ôŸБ�ԭ�팢����D�Q��Cе�ܣ��ڴň��з���ͨ������Č��w�͕��a���ŸБ�Ч���� �D2.1.7����ʾ��һ�����͵�ֱ��늙C�����·���·�����ڡ�H�����·������������Π������ĸH�����@�4�����O�ܽM��H��4�l��ֱ�ȣ���늙C����H�еęM�ܣ�ע�⣺�D2.1.7���S��ăɂ��D��ֻ��ʾ��D���������������·�D���������O�ܵ����·�]�Ю��������� ��D��ʾ��H��ʽ늙C���·����4�����O�ܺ�һ��늙C��Ҫʹ늙C�\�D����회�ͨ���Ǿ��ϵ�һ�����O�ܡ�����(j��)��ͬ���O�܌��Č�ͨ��r��������ܕ��������һ�����������^늙C���Ķ�����늙C���D�� �D2.1.6 H�����·ʾ��D Ҫʹ늙C�\�D�����ʹ���Ǿ��ϵ�һ�����O�܌�ͨ�����磬��D2.1.8��ʾ����Q1�ܺ�Q4�܌�ͨ�r������͏��Դ���O��(j��ng)Q1�������Ҵ��^늙C��Ȼ���ٽ�(j��ng)Q4�ص��Դؓ�O�����D��������^��ʾ��ԓ������������늙C형r��D�ӡ������O��Q1��Q4��ͨ�r������������������^늙C���Ķ���늙C���ض������D�ӣ�늙C�܇��ļ��^ָʾ��형rᘷ��� �D2.1.7 H����늄әC형r��D�� �D2.1.9��ʾ����һ�����O��Q2��Q3��ͨ����r������������������^늙C�������O��Q2��Q3��ͨ�r������������������^늙C���Ķ���늙C����һ�����D�ӣ�늙C�܇��ļ��^��ʾ����rᘷ��� �D2.1.8 H����늄әC��r��D�� 2.PLL����ģʽ RomeoҲ֧��PLL��λ�i��h(hu��n)����ģʽ�����2.1.2��PLL����ģʽ����_���䣬�D2.1.10�nj����Č���D�� ��2.1.2 PLL��_���� �D2.1.9 PLL����ģʽ ���@�N����ģʽ���dȤ��ͬ�W�������þW(w��ng)�j���Ҳ��˽�һ�¡� ������(zh��n)���ҡ� �҂����������L�������r�D�ӣ��]���r�R�Ͼ�ͣ���ˣ�������L���^һ����ͣ�����������ӽ�Q�أ� ����һ��LED�ЌW�^���o���Կ���LED�����磬���Կ����L�ȵ��_�P��Լ��Lԇһ�¡�
��2�n �Q���L�����е��L��һ���ǿ��ԓQ���ģ����Ϲ�(ji��)�n�҂��������L�Ȳ��܌��F(xi��n)�@�����ܡ�Arduino�����������Q���L�Ȇ���ǿ϶��ģ��@��(ji��)�n�́�W���Q���L�ȵ������� ���΄Ռ����� 1.�����x��Y����Ƕ�ף� 2.�Mһ����ϤPWM����ֱ��늙C���ٶȣ� 3.�����Q���L�ȡ� ��������x�� 1.�x��Y�� �҂�ǰ���ѽ�(j��ng)�W���^�x��Y��������������������͡����������t�������ɷN�����Y������D2.2.1��ʾ�� �D2.2.1 �x��Y�� �䌍�x��Y��߀����Ƕ��ʹ�ã���D2.2.2��ʾ�� �D2.2.2 �x��Y����Ƕ�� 2.�ð��o�Q�� �ð��o�Q�������������Q���L�ȣ�����Ȼ�Z�������Q���L�ȵĹ��ܣ���ʼ��B(t��i)�ǿՙn���L���oֹ�����o����һ�Σ��L��һ�n���L���D���Կ죻�ٰ�һ�Σ��L�ȶ��n���L���D�Ӹ��죻�ٰ�һ�Σ��ؿՓ����L��ֹͣ�D�ӡ��� �����L���D����ͨ�^�O����_5��ֵ��ǰ����늙C�ӵ�M1�Ӿ���������M2��Ԓ���t���O����_6��ֵ��ע�⣺ֵ��ȡֵ������ԓ��0-255֮�g�� �����ֲ����� ������}�������ҵēQ���L�� ͬ�W�����˽������P��֪�R�����Լ��������n�ēQ���L���ˣ��҂��õ���������Ҫ��Romeo���ӡ����o���L�ȣ���ֱ��늙C���� 1.Ӳ������Q���L�ȵ��B�ӣ� ���B�������·�r����Ҫע�⣺���o�ӵ���(sh��)�ֿ��ϣ������У����o�B�ӵ��ǔ�(sh��)�ֿ�2��늙C�ӵ���M1�Ӿ������� 2.�������� �D2.2.3 �Q���L�� ��̽��˼���� ��һ�룬�����ēQ���L��������Σ���������A�چՈͬ�W���ӑՓһ�£�����L��߀��������Щ���M��������߀����������Щ��(chu��ng)���Ч���� ��ҕҰ��չ�� 1.ArduBlock�п���늙C��ģ�K �҂���ʹ���ˡ��O����_��(sh��)��ֵ���͡��O����_ģ�Mֵ���@�ɂ�ģ�K������늙C���D�ӣ��Կ���늙CM1�������҂�����ͨ�^�O����_4�ĸߵ��ƽ���������D�ӷ���ͨ�^�O����_5��PWMֵ���������D���ٶȡ� �䌍��ArduBlock߀���҂��ṩ��������늙C����ģ�K���ڡ������C���ˡ�һ���У��քe�С�늙C�\�С����O��늙C����ֹͣ늙C������늙C����ģ�K�������҂��ͷքe��Bһ���@����ģ�K�� ��늙C�\�С�ģ�K��D2.2.4��ʾ����ͬ�r�O��늙CM1��M2���D�ӷ�����D���ٶȡ�����(sh��)����ؓ�����D�ӷ�����(sh��)ֵ��С�����D���ٶȣ�����(sh��)������-255��255֮�g�� �D2.2.4 ��늙C�\�С�ģ�K ���O��늙C��ģ�K��D2.2.5��ʾ�����O��ijһ��늙C���D�ӷ����c�D���ٶȡ����慢��(sh��)��늙C��̖�����慢��(sh��)��늙C�D�ӷ�����D���ٶȣ�ͬ��늙C�\�С��� �D2.2.5 ���O��늙C��ģ�K ��ֹͣ늙C��ģ�K��D2.2.6��ʾ����ֹͣ����늙C�� �D2.2.6 ��ֹͣ늙C��ģ�K �@�ׂ�ģ�Kʹ�����������^���Σ����dȤ��ͬ�W���ԇLԇԇ��һ�¡� 2.�ӕr���� ߀ӛ��LED�а��o���ӬF(xi��n)�����ĵ�ͬ�W���l(f��)�F(xi��n)���҂��@��İ��oҲ���ж��ӬF(xi��n)���ڱ��n�е��L�������ӕr�������䌍�ܺ��Σ����ڳ���������һ��С���ӕr��������t���И˳��ļ��ǡ� �D2.2.7 �ӕr����
������(zh��n)���ҡ� Ոͬ�W��˼��һ�£�����(j��)ǰ��W�^�İ��o���Ƶ�LED����ʹ�Ãɂ����o���Q���L�ȣ�һ���Ǽәn��һ���ǜp�n������Ԍ��F(xi��n)��Lԇһ�¡�����һ��߀�������Ŀ��Ʒ�ʽ�
��3�n �Ԅ�׃���L��ͨ�^ǰ��ČW����ͬ�W���˽����L�ȵ��D���ǿ���׃���ģ������ð��o�����ēQ���L�ȣ���ô�L�ȿ��Ը���(j��)�҂�����Ҫ�Ԅ�׃�ن �����ܿ�ɡ����@��(ji��)�n��҂��́�Lԇһ�������Ԅ�׃���L�ȡ� ���΄Ռ����� 1.�˽ⳬ������������y��ԭ���� 2.�����Ԅ�׃���L�ȡ� ��������x�� 1.���������� �҂�ʹ�õij�����������HC-SR04�������������������{ԭ����ͨ�^�O(ji��n)�y�l(f��)��һ�B���{�ƺ�ij�������ز��ĕr�g�����֪�������cĿ�����w�g�ľ��xֵ�������ܱ��^��(w��n)�����y�Ⱦ��x���_��ä�^(q��)��2cm����D2.3.1��HC-SR04������������ �D2.3.1 HC-SR04���������� HC-SR04��������������Ҫ����(sh��)���£� - ʹ��늉���DC5V��
- �o�B(t��i)�������2mA��
- �ƽݔ������5V����0V��
- �Б��Ƕȣ�������15�㣻
- ̽�y���x��2cm��450cm��
- ���ȣ�0.2cm��
��ʹ��HC-SR04�����������r�����Ȍ��������·������ͨ늣�����a�����ƽ���`����������a���ˣ�����ͨ늷��ɽ�Q����_���x�����2.3.1��ʾ�� ��2.3.1 HC-SR04������������_���x
2.�����������y�� ���@��҂�ֻ�W�������y�����ε�һ�N��Ҳ�DZ��n��Ҫ�õ��ģ����������������̶�ס���˕r���Ԝy�����c�ϵK��֮�g�ľ��x��HC-SR04�Ĺ���ԭ������1������IO�|�l(f��)�y�࣬�o����10us�ĸ��ƽ��̖����2��ģ�K�ԄӰl(f��)��8��40khz�ķ������Ԅәz�y�Ƿ�����̖���أ���3������̖���أ�ͨ�^IOݔ��һ���ƽ�����ƽ���m(x��)�ĕr�g���dz����İl(f��)�䵽���صĕr�g���yԇ���x=(���ƽ�r�g����)/2�� ��ArduBlock�������ֱ���x�������������y���ľ��xֵ�����D2.3.2��ʾ��Trig�B�Ӕ�(sh��)�ֿ�8��Echo�B�Ӕ�(sh��)�ֿ�9�� �D2.3.2 �����y�ಢ�@ʾ �����ֲ����� ������}�������ҵ��Ԅ�׃���L�� ͬ�W�����˽������P��֪�R�����Լ��������n���Ԅ�׃���L���ˣ��҂��õ���������Ҫ��Romeo���ӡ�HC-SR04�������������L�ȣ���ֱ��늙C���� 1.Ӳ��� ���B�������·�r����Ҫע�⣺Trig��Echo�քe�ӵ���(sh��)�ֿڣ������У�Trig��Echo�քe�B�Ӕ�(sh��)�ֿ�8��9��늙C�ӵ���M1�Ӿ������� 2.�������� �����L�ȡ�늙C�����d�صIJ�ͬ��ʹ�L���D�ӵ���С�ƽҲ����ͬ�ģ�Ոͬ�W���Լ��z�yһ��ʹ�L���D�ӵ�PWMֵ��С�Ƕ��٣���ӛ����� �D2.3.3 �Ԅ�׃���L�� ��̽��˼���� Ոͬ�W��˼����ӑՓһ�£����҂��ճ������У��������õ������y�ࣿ��������\�ó����y���أ������y�����Щ��(y��u)ȱ�c�� ��ҕҰ��չ�� 1.�����y�� ���ڳ���ָ���ԏ����������ľ������ڽ��|�Ђ����ľ��x�^�h�����������(j��ng)�����ھ��x�Ĝy������y���x����λ�y���x�ȶ�����ͨ�^�����팍�F(xi��n)�����ó����z�y�������^Ѹ�١����㡢Ӌ�㺆�Ρ������������r���ƣ������ڜy�����ȷ������_�����I(y��)���õ�Ҫ��������ƄәC����������Ҳ�õ��ˏV���đ��á� �����l(f��)������ijһ����l(f��)�䳬�����ڰl(f��)��r�̵�ͬ�r�_ʼӋ�r�������ڿ՚��Ђ�����;�������ϵK������������������������յ����䲨������ֹͣӋ�r�������ڿ՚��еĂ����ٶȞ�340m/s������(j��)Ӌ�r��ӛ䛵ĕr�gt���Ϳ���Ӌ����l(f��)���c���ϵK��ľ��x(s)������s=340��t/2 ���@�������^�ĕr�g��y�෨�� �����y���ԭ�������ó����ڿ՚��еĂ����ٶȞ���֪���y�����ڰl(f��)��������ϵK�ﷴ����ĕr�g������(j��)�l(f��)��ͽ��յĕr�g��Ӌ����l(f��)���c���ϵK��Č��H���x���ɴ˿�Ҋ�������y��ԭ���c���_ԭ����һ�ӵġ� �y��Ĺ�ʽ��ʾ�飺L=C��T ʽ��L��y���ľ��x�L�ȣ�C�鳬���ڿ՚��еĂ����ٶȣ�T��y�����x�����ĕr�g��(T��l(f��)�䵽���Օr�g��(sh��)ֵ��һ��)�� �����y����Ҫ�����ڵ�܇���ѡ��������ء����I(y��)�F(xi��n)���ȵľ��x�y�����mȻĿǰ�Ĝy�����������_�����ף����y���ľ�������ֻ���_�����ה�(sh��)������ 2.�t�⾀�y�� ߀��һ�N�y�������üt�⾀�y��ġ��t��y��ԭ�������_�y��ԭ�����ƣ��ǰl(f��)��t�⾀Ȼ��y���ز��r�g�����ٳ��ԕr�g�ٳ���2�͵õ����x�� ���ڹ��ٺܿ죬���t��y���xһ��y�����x���^�̣��ó�Ҏ(gu��)���}�_�����l(f��)��һ���}�_Ȼ��Ӌ���յ������}�_�ĕr�g���������r�g�^�̶��o���y��������һ���nj��t�⾀�l(f��)�书���{����һ���^�͵��l�ʣ�Ȼ��y���ز��c�l(f��)�䲨����λ�����(j��)��λ�����Ӌ����ز��r�g�����üt�⾀�l(f��)���b�ðl(f��)���t�⾀����(j��ng)�^�ϵK�ﷴ���Ժ�һ�t�⾀����̽�^�յ��������յ��ļt�⾀��̖�D�������̖�M��Ӌ�㣬��ʽ���Ǐİl(f��)�䵽���ܵ��ĕr�g��һ����Թ��٣� �t��y��߀���кܶ����õģ����磺��܇����ץ�ġ�؛܇�ߙz�y���w�C�߶șz�y����܇��վ�z�y�����|�W(w��ng)�z�y���������әz�y���V�����λ�Ùz�y���}����λ�O(ji��n)�y�������߶șz�y�����C�߶�λ�Ùz�y���V��݆������ȵȡ� ������(zh��n)���ҡ� Ոͬ�W��˼��һ�£����糬������������ǰ���Ƅӣ���ô�y��ĕr����Ҫ����Щ���]�أ���������뷨���c����ͬ�WӑՓһ�¡�
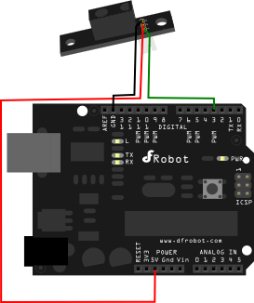
��4�n �b���L���t���b�������҂����õ�һ�N�b���O�䣬�������������ҕ�����{�ȼ��������ǰ���҂����^���L��Ҳ�������г�Ҋ�ļ���������������b�ؿ��Ɔ�@��(ji��)�nͨ�^���t���b�صČW�����҂��Ϳ��Կ����L���ˣ��_ʼ���ܼҾӵ�һ�c�Lԇ�ɡ� ���΄Ռ����� 1.�˽�t���b������ 2.�����b���L�ȡ� ��������x�� 1.�t���b�������� �t���b����Ŀǰʹ����V����һ�Nͨ�ź��b���ֶΡ����ڼt���b���b�þ����w�eС�����ĵ͡��������ɱ��͵����c���^��늡����C֮��������C������O�䡢�յ��Լ���ߵ�����С������b����Ҳ�������üt���b�ء����I(y��)�O���У��ڸ߉���ݗ�䡢�ж����w���ۉm�ȭh(hu��n)���£����üt�⾀�b�ز��H��ȫ�ɿ���������Ч�ظ��x늚�ɔ_�� �t���b����Ҫ�����t���b�����ͼt������^����D2.4.1��ʾ���t���b������21�����I���t������^��_�Ķ��x�ǣ�D�B�Ӕ�(sh��)�ֿڣ�VCC��5V��GND��GND�� �D2.4.1 �t���b���� �t���b�������Ќ������Iֵ����ʹ�Õr�������茦�b�����M�н�a���������õ��ļt���b�������Iֵ��ʮ���M�ƵĔ�(sh��)ֵ�����2.4.1��ʾ�� ��2.4.1 �t���b�����Iֵ���� �����ֲ����� ������}�������ҵ��b���L�� ͬ�W�����˽������P��֪�R�����Լ��������n���b���L���ˣ��҂��õ���������Ҫ��Romeo���ӡ��t���b�������L�ȣ���ֱ��늙C�������ܣ�ͨ�^�b�ؿ����L���_�����P�]�� 1.Ӳ��� ���B�������·�r����Ҫע�⣺�t������^�B�ӵ���(sh��)�ֿڣ�ȡ���t���b����늳���������Ͻ^��Ƭ�������У��t������^�B�Ӕ�(sh��)�ֿ�11��늙C�ӵ���M1�Ӿ������� ��1���t���b�����Ľ�a���� �D2.4.2 �t���b�����Ľ�a ��2���b���L�ȵą������� �D2.4.3 �b���L�� ��̽��˼���� Ոͬ�W��˼��һ�£����҂�С�r�������У��Л]���õ��b�ص��أ������b���w�C���b����܇�ȣ������Ǽt���b�؆������ǣ��c�t���b����ʲô�^(q��)�e�� ��ҕҰ��չ�� 1.�t���b�ع���ԭ�� �t���b�����l(f��)������̖��һ�B���Ķ��M���}�_�a������ʹ���ڟo����ݔ�^�������������t����̖�ĸɔ_��ͨ�������Ȍ����{�����ض����d���l���ϣ�Ȼ���ٽ�(j��ng)�t��l(f��)����O�ܰl(f��)���ȥ�����t�⾀�����b�ÄtҪ�V�������s����ֻ����ԓ�ض��l�ʵ���̖������߀ԭ�ɶ��M���}�_�a��Ҳ���ǽ��{�� ���ý��չ܌��t��l(f��)��ܰl(f��)������Ĺ���̖�D�Q���������̖������̖��(j��ng)��IC�Ȳ��Ŵ����M�зŴ�Ȼ��ͨ�^�Ԅ�������ơ���ͨ�V�������{׃�� �������κ�߀ԭ���b�����l(f��)�����ԭʼ���a����(j��ng)�ɽ����^����̖ݔ���_ݔ�뵽����ϵľ��a�R�e�·�� Ҫ�댦ijһ�b�����M�н�a���Ҫ�˽�ԓ�b�����ľ��a��ʽ���@�ͽ�֪��֪�ˣ��ّ�(zh��n)���� ������(ji��)�nʹ�õ��b�����ľ��a��ʽ�飺NEC�f(xi��)�h������ͽ�Bһ��NEC�f(xi��)�h�� ��1��8λ��ַλ��8λ����λ�� ��2�����˿ɿ��ԣ���ַλ������鱻��ݔ�ɴΣ� ��3���}�_λ���{�ƣ� ��4���d���l��38khz�� ��5��ÿһλ�ĕr�g��1.125ms��2.25ms�� 2.���ܼҾ� ���ܼҾ�����סլ��ƽ�_�����þC�ϲ������g���W(w��ng)�jͨ�ż��g�� ���ܼҾ�-ϵ�y(t��ng)�OӋ������ȫ�������g���Ԅӿ��Ƽ��g����ҕ�l���g���Ҿ��������P���Oʩ���ɣ�������Ч��סլ�Oʩ�c��ͥ�ճ��յĹ���ϵ�y(t��ng)�������ҾӰ�ȫ�ԡ������ԡ����m�ԡ�ˇ�g�ԣ������F(xi��n)�h(hu��n)����(ji��)�ܵľ�ס�h(hu��n)���� ���ܼҾ����ڻ�(li��n)�W(w��ng)Ӱ�֮�µ���(li��n)���w�F(xi��n)�����ܼҾ�ͨ�^��(li��n)�W(w��ng)���g�����еĸ��N�O�䣨����ҕ�l�O�䡢����ϵ�y(t��ng)���������ơ����{���ơ�����ϵ�y(t��ng)����(sh��)��ӰԺϵ�y(t��ng)���W(w��ng)�j����Լ��������͵ȣ��B�ӵ�һ���ṩ��늿��ơ��������ơ��������ơ��Ԓ�h�̿��ơ��҃����b�ء����I���h(hu��n)���O(ji��n)�y��ůͨ���ơ��t���D�l(f��)�Լ��ɾ��̶��r���Ƶȶ�N���ܺ��ֶΡ��c��ͨ�Ҿ���ȣ����ܼҾӲ��H���Ђ��y(t��ng)�ľ�ס���ܣ���?zh��n)佨�����W(w��ng)�jͨ�š���Ϣ��늡��O���Ԅӻ�����ϵ�y(t��ng)���Y�������ա������һ�w�ĸ�Ч�����m����ȫ���������h(hu��n)���ľ�ס�h(hu��n)�����ṩȫ��λ����Ϣ�������ܡ�������ͥ�c�ⲿ������Ϣ������ͨ����(y��u)���˂������ʽ�������˂���Ч���ŕr�g�������Ҿ�����İ�ȫ�ԣ���������N��Դ�M�ù�(ji��)�s�Y�� ͬ�W���Л]�����^ͨ�^�t���b�ؿ��Ƽ��е���������أ��s���w�һ�����ܼҾӰɣ� ������(zh��n)���ҡ� ǰ���҂����^һ���Q���L�ȣ��@���҂�ʹ�üt���b�ؿ����L�ȣ���һ���ɓQ�����L�ȡ�
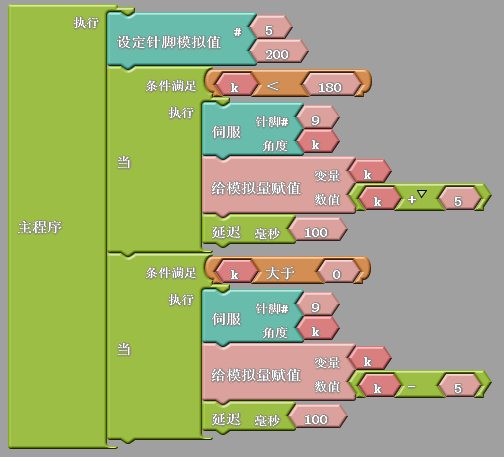
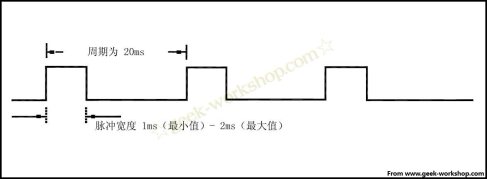
��5�n �u�^�L��ǰ���҂��������L�ȶ��dz�һ�����ģ����������Щ�L���ǿ��ԓu�^�ģ��ܲ����҂����L��Ҳ�u�^�أ���Ȼ���ԣ��@����Ҫ��C�ļ����ˣ��@��(ji��)�n�҂����˽��C�����P֪�R�����������u�^�L�ȡ� ���΄Ռ����� 1.�˽��C���P֪�R�� 2.�����u�^�L�ȡ� ��������x�� ��C���� ��C���ַQ�ŷ�늙C������ģ�ۺ��߂���(j��ng)�����@�N늙C������ģ�͵ķ���棬���������Q�顰��C�����乤���^���ǰ������յ������̖�D�Q��늄әC�S�ϵĽ�λ�ƻ���ٶ�ݔ����Ŀǰ�V�������ڙC���˿����I���С������õ��Ķ�C��TowerPro��Ʒ��SG90��C����D2.5.1��ʾ��ԓ��C���øߏ���ABS���⚤���ԃȲ��߾��������X݆�M�����Ͼ��ʵĿ����·���ߙn�p�������ı�늙Cʹԓ�Ͷ�C������ֻ��9�ˣ���ݔ�������_�����@�˵�1.8kg*cm���˜ʵĶ�C�����l���ƾ����քe���Դ���غ���̖������C����_���x�飺��ɫ������GND���tɫ������5V����ɫ��������̖���� �D2.5.1 SG90��C ��C�Ŀ���һ����Ҫ����ذl(f��)�o��һ�����ƽ�r�g��1-2ms֮�g�����ƽ�r�g��5-20ms֮�g���}�_��̖��ע�⣺Arduino����֧�ֶ�C��ֻ�Д�(sh��)�ֿ�9��10����˶�C��ɫ��ֻ���B�Ӕ�(sh��)�ֿ�9��10�������҂�ʹ�õ�SG90��C�D�ӽǶ���0-180��֮�g�� �����ֲ����� ������}�������ҵēu�^�L�� ͬ�W�����˽������P��֪�R�����Լ��������n�ēu�^�L���ˣ��҂��õ���������Ҫ��Romeo���ӡ���C���L�ȣ���ֱ��늙C���� 1.Ӳ������u�^�L�ȵ��B�ӣ� ���B�������·�r����Ҫע�⣺��C�ӵ���(sh��)����_�������У���C�B�ӵ��ǔ�(sh��)����_9��늙C�ӵ���M1�Ӿ������� 2.���ƶ�C��0���D��180��ą������� �D2.5.3 ���ƶ�C 3.�u�^�L�ȵą������� �u�^�L���Ƕ�C��0���D��180�㣬Ȼ�����D��������һֱ�����L�ȵ�늙C�_�����ɣ�������ʾ�� �D2.5.4 �u�^�L�� ��̽��˼���� Ոͬ�W���^��һ�£��L�ȶ����Ԅӓu�^���҂����Կ������ӑՓһ�£���Ό��F(xi��n)��
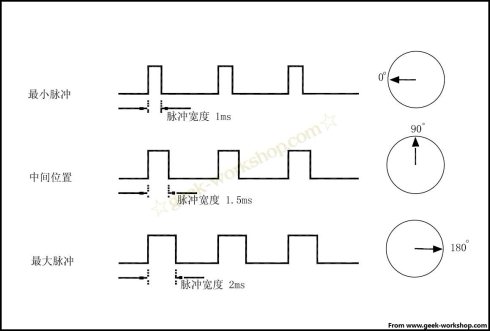
��ҕҰ��չ�� 1.��C�Ĺ���ԭ�� ��C���b��ģ�Ϳ��Ƅ����Ą�����Դ����ͬ��͵��b��ģ������Ķ�C�N�Ҳ�S֮��ͬ����Ό������x��(j��ng)���ҺϺ�����Ķ�C��Ҳ��һ�T�����p���ČW���� ����ԭ����������̖�ɽ��ՙC��ͨ���M����̖�{��оƬ���@��ֱ��ƫ��늉������Ȳ���һ�������·���a�����ڞ�20ms�����Ȟ�1.5ms�Ļ�����̖�����@�õ�ֱ��ƫ��늉��c�λ����늉����^���@��늉���ݔ�������늉������ؓݔ����늙C��оƬ�Q��늙C�������D����늙C�D��һ���r��ͨ�^��(li��n)�p���X݆�����λ�����D��ʹ��늉����0��늙Cֹͣ�D�ӡ���Ȼ�҂����Բ���ȥ�˽����ľ��w����ԭ����֪�����Ŀ���ԭ���͉��ˡ������҂�ʹ�þ��w��һ�ӣ�֪���������������_�P�ܻ�Ŵ�ܾ����ˣ����ڹ܃ȵ���Ӿ��w��ô�����ǿ�����ȫ����ȥ���]�ġ� 2.��C�Ŀ��Ʒ�ʽ ��C���ŷ�ϵ�y(t��ng)�ɿ�׃���ȵ��}�_���M�п��ƣ����ƾ����Á�����}�_�ġ��}�_�ą���(sh��)����Сֵ�����ֵ�����l�ʡ�һ����ԣ���C�Ļ�����̖�������ڞ�20ms�����Ȟ�1.5ms���@��������̖���x��λ�Þ����gλ�á���C������D�ӽǶȣ����gλ�õĶ��x���Ǐ��@��λ�õ����Ƕ��c��С�Ƕȵ�����ȫһ�ӡ�����Ҫ��һ�c�ǣ���ͬ��C������D�ӽǶȿ��ܲ���ͬ�����������gλ�õ��}�_������һ���ģ��Ǿ���1.5ms����D2.5.5��ʾ�� �D2.5.5 �}�_���� �Ƕ����Ɂ��Կ��ƾ��ij��m(x��)���}�_���a�����@�N���Ʒ��������}�_�{�ơ��}�_���L�̛Q����C�D�Ӷ��Ƕȡ����磺1.5�����}�_�����D�ӵ����gλ�ã�����180���C���f������90��λ�ã���������ϵ�y(t��ng)�l(f��)��ָ���C�Ƅӵ�ijһλ�ã����������@���Ƕȣ��@�r������Ӱ푲������ĽǶȮa��׃���������@���������ģ��������������Ť�������ǿ���ϵ�y(t��ng)��ͣ�İl(f��)���}�_��(w��n)����C�ĽǶȣ���C�ĽǶȲ���һֱ��׃������C���յ�һ��С��1.5ms���}�_��ݔ���S�������gλ�Þ�˜ʣ���r����Dһ���Ƕȡ����յ����}�_����1.5ms��r�෴����ͬƷ�ƣ�����ͬһƷ�ƵIJ�ͬ��C�������в�ͬ�����ֵ����Сֵ��һ����ԣ���С�}�_��1ms������}�_��2ms����D2.5.6��ʾ�� �D2.5.6 �}�_�����c�D�ӽǶ� ������(zh��n)���ҡ� �u�^�L�Ⱥܲ��e�ɣ������҂�����ϣ����һֱ�ړu�^����ʲô�k�����Կ������ᣬ�Ա����҂����u�^�œu�^�������u�^��ֹͣ�u�^��ԇһԇ�ɡ�
��6�n �ԄӸ�ۙ�L��ͨ�^��һ��(ji��)�n���҂������L�ȓu�^�ˣ���ô�������Ԅӓu�^���Ό��F(xi��n)�أ��@��(ji��)�n�҂����W����(sh��)�ַ��������������ͨ�^�ɂ���(sh��)�ַ���������������ʹ�������ԄӸ�ۙ�L�ȡ� ���΄Ռ����� 1.�˽┵(sh��)�ַ������������ 2.�����ԄӸ�ۙ�L�ȡ� ��������x�� 1.��(sh��)�ַ���������� ��(sh��)�ַ�����������ڵ�һ�����^��B����������x�ޣ������@�������c�v��һ�¡��������չ�˾�ľ��x����������Ч�y��10cm���_�P��ݔ�����ɮ��������x���ς�����ʹ�á���D2.6.1��ʾ�� �D2.6.1 ��(sh��)�ַ���������� ��(sh��)�ַ����������ݔ������̖�锵(sh��)����̖����_���x�飺�t������5V���G��������̖���ھ�����GND���Ӿ��D��D2.6.2��ʾ�� �D2.6.2 ��(sh��)�ַ�����������Ӿ��D 2.�ԄӸ�ۙ�L��ԭ�� �ԄӸ�ۙ�L�ȣ�Ҳ�ɷQ���Ԅӓu�^�L�ȣ��ǿ����ԄӸБ����L�ȣ������������S�ֵĻ΄Ӹ����u�^������ͨ�^���҃ɂ���(sh��)�ַ�����������z�y�ϵK����\�ӷ���ģ�����Ȃ������z�y���ϵK����҂Ȃ������]�Йz�y�����t��C�����D�ӣ����҂Ȃ������z�y���ϵK�����Ȃ������]�Йz�y�����t��C�����D�ӣ���ɂȂ�����ͬ�r�z�y���ϵK��t����ԭ������ ���⣬��(sh��)�ַ������������̽�^ǰ���o�ϵK�rݔ�����ƽ�����ϵK�r�t�෴���ϵK����Ч���x��10cm���Ȅtݔ�����ƽ����t�Ǹ��ƽ����ˣ�����ͨ�^���^���҂��������ƽ�ߵ�ֵ�Д��C���D�ӷ����Ă��ƽ�����Ă��D�ӡ� �����ֲ����� ������}�������ҵ��ԄӸ�ۙ�L�� ͬ�W�����˽������P��֪�R�����Լ��������n���ԄӸ�ۙ�L���ˣ��҂��õ���������Ҫ��Romeo���ӡ���(sh��)�ַ��������������C���L�ȣ���ֱ��늙C�������ܣ����F(xi��n)�ԄӸ�ۙ�D�ӡ� 1.�ԄӸ�ۙ�L�ȵ��B�� ���B�������·�r����Ҫע���@�ӎ��c����(sh��)�ַ�����������Ͷ�C���B�Ӕ�(sh��)�ֿڣ������У���(sh��)�ַ�����������քe�B�Ӕ�(sh��)�ֿ�11��12����C�B�Ӕ�(sh��)�ֿ�9��늙C�ӵ���M1�Ӿ������� 2.�������� �D2.6.3 �ԄӸ�ۙ�L�� ��̽��˼���� Ոͬ�W��˼��һ�£�ǰ���҂��W�^�ij����y������Á������φ������ԣ����ԇһԇ�ɡ� ��ҕҰ��չ�� 1.�t������� �t�����ϵ�y(t��ng)���üt�⾀����|�Ĝy��ϵ�y(t��ng)���t����м��g�ѽ�(j��ng)�ڬF(xi��n)���Ƽ����������r�I(y��)���I��@���ˏV���đ��á��t�⼼�g�ѽ�(j��ng)������֪���@헼��g�ڬF(xi��n)���Ƽ��������Ƽ����r�I(y��)�Ƽ����I��õ��ˏV���đ��á��t�����ϵ�y(t��ng)���üt�⾀����|�Ĝy��ϵ�y(t��ng)�����չ����܉�ֳ������1��ݗ��Ӌ������ݗ����V�y������2��������ۙϵ�y(t��ng)������������ۙ�t��Ŀ�ˣ��_������gλ�ò��������\���M�и�ۙ����3�������ϵ�y(t��ng)���ɮa������Ŀ�˼t��ݗ��ķֲ��D��4���t��y���ͨ��ϵ�y(t��ng)����5�����ϵ�y(t��ng)����ָ���ϸ��ϵ�y(t��ng)�еăɂ����߶����ĽM�ϡ� ���üt�⾀���������|���M�Мy���Ă��������t�⾀�ַQ�t��⣬�����з��䡢���䡢ɢ�䡢���桢���յ����|���κ����|��ֻҪ����������һ���Ĝضȣ����ڽ^����ȣ�������ݗ��t�⾀���t�⾀�������y���r���c���y���wֱ�ӽ��|�����������Ħ�����������`���ȸߣ�푑��ٶȿ�ȃ�(y��u)�c�� �t�⾀������������Wϵ�y(t��ng)���z�yԪ�����D�Q�·����Wϵ�y(t��ng)���Y����ͬ�ɷ֞���ʽ�ͷ���ʽ����z�yԪ��������ԭ���ɷ֞�����z�yԪ����늙z�yԪ��������Ԫ�����������ǟ�����衣��������ܵ��t�⾀ݗ��r�ض����ߣ����l(f��)��׃����ͨ�^�D�Q�·׃�����̖ݔ������늙z�yԪ�����õ��ǹ���Ԫ����ͨ�������U�������U���黯㟡��黯�R�����k����Ԫ�Ͻ��N���蓽�s�Ȳ����Ƴɡ� �t�⾀�����������ڟo���|�ضȜy�������w�ɷַ����͟o�p̽�������t(y��)�W��܊�¡����g���g�ͭh(hu��n)�����̵��I��õ��V�����á�������üt�⾀�������h���x�y�����w����ضȵğ���D�����l(f��)�F(xi��n)�ضȮ����IJ�λ�����r�������M���\���ί���Ҋ����x�������������l(w��i)���ϵļt�⾀�������������ƌ��M�бO(ji��n)ҕ���Ɍ��F(xi��n)��������A���üt�⾀�������əz�y�w�C�������\�еİl(f��)�әC���^����r�ȡ� ������(zh��n)���ҡ� �҂��ѽ�(j��ng)�W�^�L�ȵĶ�N���ƣ���һ��߀��������ʲô��(chu��ng)��������Ҳ��y(t��ng)Ӌһ��߀����Щ��������
��7�n �L�ȾC�τ�(chu��ng)��
ͨ�^ǰ��6��(ji��)�n�ČW�����҂��ѽ�(j��ng)�˽����S���P���L�ȵ��������ڌW���������^���У�ͬ�W���Л]�Юa��һЩ��(chu��ng)����뷨�����е�Ԓ����ô�@��(ji��)�n���҂��팍�F(xi��n)�ɡ� ���΄Ռ����� 1.�������r�L�ȡ��ؿ��L�Ȼ�A���Ԅ�ֹͣ�L���е�һ�N�� 2.�Լ��OӋ���Lԇ���F(xi��n)һ�N�Є�(chu��ng)����L�ȣ� 3.�u�r�Լ������˵Ą�(chu��ng)���L�ȡ� ��������x�� 1.�ضȂ����� �����õ��ĜضȂ�������DFRobot��LM35����ģ�M�ضȂ���������D2.7.1��ʾ������LM35�댧�w�ĜضȂ������������Á팦�h(hu��n)���ض��M�ж��Եęz�y���ضȜy�����õĂ������������ż���K��裬�������Ͱ댧�w�y��оƬ�����П��ż�����ڸߜy�����K��������Мy�������z��800�����ң������������Ͱ댧�w�ضȂ������m����100-200�����µĜضȜy�������а댧�w�ضȂ������đ��ú��Σ����^�õľ��ԶȺ��^�ߵ��`���ȡ�LM35�댧�w�ضȂ��������������Ұ댧�w��˾���a�ľ��ԜضȂ���������y�ط�����-40�浽150�棬�`���Ȟ�10mV/�棬ݔ��늉��c�ضȳ����ȡ�LM35���ԜضȂ������cArduino���Â������Uչ��Y��ʹ�ã����Էdz����،��F(xi��n)�c�h(hu��n)���ضȸ�֪���P�Ļ���Ч���� �D2.7.1 LM35����ģ�M�ضȂ����� LM35����ģ�M�ضȂ���������_���x�飺1����ģ�Mݔ����̖��2����GND��3����VCC���Ӿ��D��D2.7.2��ʾ�� �D2.7.2 ģ�M�ضȂ������Ӿ��D LM35����ģ�M�ضȂ������Ĝyԇ���a���£� �D2.7.3 �ضȂ����� 2.�A�ǂ����� �����õ��ăA�ǂ�������DFRobot�Ĕ�(sh��)�����A�ǂ���������D2.7.4��ʾ����������_�P�Ĕ�(sh��)��ģ�K�������������ԣ�ͨ�^��������ʹ������̎�L�ӣ��Ķ�ʹ�_�P�]�ϻ���_�����Ҳ�������麆�εăA�ǂ�����ʹ�á�����_�P��(sh��)��ݔ��ģ�K���cArduino���Â������Uչ��Y��ʹ�ã��܉F(xi��n)�dz���Ȥ�Ļ�����Ʒ����ʹ��ˮ�y�_�P���Ӱ�ȫ�� �D2.7.4 ��(sh��)�����A�ǂ����� ��(sh��)�����A�ǂ���������_���x�飺1������(sh��)����̖ݔ����2����VCC��3����GND���Ӿ��D��D2.7.5��ʾ�� �D2.7.5 ��(sh��)�����A�ǂ������Ӿ��D �����ֲ����� 1.���r�L�� ���r�L�Ȼ���˼·��ʾ��ͨ�^���o���L���M�ж��r������һ�����o���ƣ���һ�ζ��r2��犺��L���Ԅ�ֹͣ���ɂ����o���ƣ�����һ�����o2��犺��L���Ԅ�ֹͣ�����ڶ������o5��犺��L���Ԅ�ֹͣ�� 2.�ؿ��L�� �ؿ��L�Ȼ���˼·��ʾ��ͨ�^�ضȂ������Б��h(hu��n)���ضȣ����ض��_��ij��ֵ�r���L���Ԅ��_�����˺ض���u���ߕr���L���ԄӼӿ��D�١� 3.�A���Ԅ�ֹͣ�L�� �A���Ԅ�ֹͣ�L�Ȼ���˼·��ʾ�����ÃA�ǂ��������Д��L���Ƿ�A��������ǵ�Ԓ���L���Ԅ�ֹͣ�D�ӣ���t�^�m(x��)�D�ӡ� 4.������(chu��ng)���L�� �Լ��OӋ���Lԇ���F(xi��n)һ�N�Є�(chu��ng)����L�ȡ� ��̽��˼���� Ոͬ�W�����Bһ���Լ��Ą�(chu��ng)���L�ȣ������u�rһ�¡� ��ҕҰ��չ�� 1.��(chu��ng)���L�ȡ����o���~�L�� ���飺������һֻ���ָ�h(hu��n)�����ܮa���������ě�ˬ�՚⣬���Ұ��o�o��Ҳ�Ȃ��y(t��ng)��Ȱ�ȫ�����⣬����ϴ����Ҳ�Ȃ��y(t��ng)��L�ȷ���ö࣬�Ĵ˲��Þ��������~�Ϸe�M�Ļ҉m�l(f��)���ˡ��͂��y(t��ng)��L��һ�ӣ���90�Ƚǔ[�ӡ���ͬ���ǣ���߀��ͨ�^�˞���ưl(f��)������׃���� ��ɫ���]�����~�������\�D���������ҳ��L������(w��n)�������L���LǬ�^�r�������^�l(f��)�o�����Mȥ������С���������܂���������L�ȕrֻҪһ�lĨ�������p�ɸ㶨���L�Ț������Џ��ţ���������������߂���y(t��ng)��L���`���{�����|��������D�����½Ƕ��{���ȡ� ԭ���������Ў��еĸ߹����R�_���՚������L�Ȼ����Ȳ�����(j��ng)�ɚ������������ٺ՚���ͨ�ٶȌ��������(j��ng)�ɟo�~�L�����^�h(hu��n)�ȴ��h(hu��n)�@����h(hu��n)�@���������^�����Ŀ՚��S֮�M�����^�����Ը������ⴵ������K�γ�һ�ɲ��g�����՚��������һ����������L�hȻ�������@�N�������L�Ȳ��H�����n������������Ҳʮ�ַ��㣬��ȫ��Ҳ�õ�����ߡ��L���@�N�|��Ҳ�Ĵ�׃�ø��Ӱ�ȫ�� 2.��(chu��ng)���L�ȡ��������L�� ���죺늄әC���~Ƭ���⚤�w����L���⚤�w�ϰ��b��늟�������� ԭ����ԭ��L�Ț��w���m��λ�ð��b��һ늟������������������ˎƬ����ͨ�Դ��늟�������l(f��)�ᣬʹ���ˎƬ���ӟ�ɢ��ˎ��Ķ��_�����֮Ч����L�ȵ��R�_�c������քe�ܿ��ڃɂ��������Դ�_�P��ʹ���L�c��ÃɷN���ܿ���ͬ�r��Ҳ���Էքe�ع�����ʹ������ʮ����Ч�����㡣��L����ʹ���^���У���Ç��F�����������Һ����ͨ�^���~���D�Ӷ�����Ҵ���eɢ�l(f��)���������Ч�����Ķ��_�����ء���õ��p�ع�Ч�� ������(zh��n)���ҡ� ��һ���L��߀����Щ��(chu��ng)���أ��������OӋ�Ą�(chu��ng)���L��߀����Щ���M�أ�
������ ����С܇
��1�n ��ֱ��С܇ͨ�^ǰ����µČW�����҂�������Arduino����LED���������L�ȣ������҂�����ʹ�ø��N����������������С܇��?��������ֱ������8�֣���Ѳ������......��Ȼ���ǿ϶��ģ�ֻҪ��đ��������ǰ�M���҂��Ϳ�����������˼��С܇���@��(ji��)�n��Ҫ��ͨ�^���εĽӾ����������{ԇ���Ķ��J�RС܇���˽�С܇�Ļ��A֪�R�������ֱ��С܇���΄ա� ���΄Ռ����� - С܇늙C�Ӿ���
- ͨ�^����С܇��ֱ����
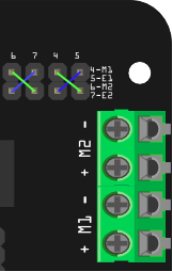
��������x�� ߀ӛ���҂��ڵڶ��W���ġ����L�ȡ���ڲ�����x���棬�҂��˽���Romeo����ֱ��늙C�����P֪�R��֪���˔�(sh��)����_4��5��6��7�cM1��M2�������Pϵ����������֪�R�Ժ��м��^��l(f��)�F(xi��n)���҂���С܇���ҷքe����һ��늙C�����D����ÿ��늙C�����t�ڃɗl�����ڽӾ��ĕr���Ԍ��ɂ�늙C�����ļt���c�ھ��քe����M1��M2����ؓ�O��ע�⼚���ҵ�M1��M2��߅�ġ�+����������̖�����@��t�ھ��cM1��M2��ؓ�O�Č����Pϵ����Ӱ푵�С܇�\�ӵķ���
�D3.1.1 С܇ֱ��늙C
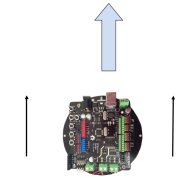
С܇ֱ�߷֞�ɷN��r��ǰ�M�����ˡ�ͬ�ӣ��҂�Ҳ����ͨ�^�ɷN��ʽ�팍�F(xi��n)С܇ǰ�M�����ˡ� - ���̡��ڽӾ���������r�£��t���������ھ���ؓ�������Ը�׃4��7��_�ĸߵ��ƽ������С܇ǰ�M�����ˡ��@�������c�ڶ��¿����L�����D�����Dһ�ӣ��Ͳ���٘����
- �Ӿ����ڳ���׃�Ļ��A�£��҂���׃С܇늙C���B�Ӿ�������ʹС܇���\�ӷ���l(f��)��׃�������w��r���£���늙C�����ļt���քe�cM1��M2ؓ�O���B���ھ��c���O���B���˕r��ԭ��ǰ�M��С܇�����ˣ���֮��Ȼ�������һ��늙C�ļt����M1���O���ھ���M1ؓ�O����һ���t����M2ؓ�O���ھ���M2���O���˕rֱ�ߵ�С܇��ԭ�ش��D�����dȤ��ͬ�W�ڄ��ֲ����h(hu��n)��(ji��)�����M�ЇLԇ��
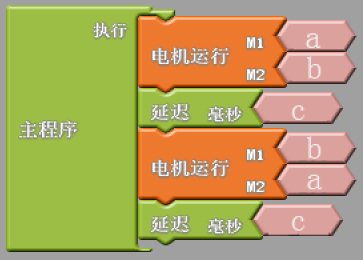
�����ֲ����� ������}����ֱ���ęC����С܇ 1.Ӳ��� �����n�е�С܇�ѽ�(j��ng)��ǰ��ã����dȤ��ͬ�W���ԅ��մ�õ�С܇���Լ��M�bһ������С܇��늙C�Ӿ��Ӻ�(���nĬ�J���t�������O���ھ���ؓ�O)����ArduBlock���M�г����{ԇ��С܇ǰ�M�����ˡ� 2.�������� ���������ṩ�ɷN���̷�����ͨ�^�Ӿ���׃С܇ǰ�M����Č������Լ��Lԇ����������1����: �D3.1.3 ��_����С܇ǰ�M������
���ִ��a��ጣ� �^��С܇�����l(f��)�F(xi��n)��С܇�������100���D����ǰǰ�M1�룬�ٺ���һ�롣���@��҂���ͨ�^���́�����С܇�\�ӷ��o��(sh��)����_4��7�Ը��ƽ���˕rС܇ǰ�M����֮��С܇���ˡ� ���˸�׃����߀���ԸĄ�С܇�Ӿ�����Q�@�����}�����҂����ɂ�늙C�����ļt�����ڽӾ�����ؓ�O���ھ��ӵ��Ӿ��������O���˕r������o��(sh��)����_4��7�O�ø��ƽ��С܇�����ˣ���֮��С܇ǰ�M�� ��������2���£�
�D3.1.3 늙C����С܇ǰ�M������ ���ִ��a��ጣ� ���������У�M1��M2�O�Þ�255���˕rС܇ǰ�M��M1��M2�O�Þ�-255���˕rС܇���ˡ� �ڜyԇ�r��ֱ�ӌ�USB�cArduino�����B�ӿ�����С܇�������D���^���������ܔ�(sh��)��(j��)���L�̵����ƣ�С܇�\�ӿ��g���^�MС���@�N��r�£��҂����ԽoС܇��������Դ�����磺�늳أ�ʹ��С܇Ó�x��(sh��)��(j��)�����Ա��҂��^�졣���늳ؽ���Romeo������������Դ�ӿ��ϡ� �D3.1.4 С܇�B������Դ ��̽��˼���� С܇ǰ�M�����˵Č���У�С܇�ߵ���һ�lֱ��������ʲô�� ��ҕҰ��չ�� 1.С܇���߲�ֱ��ԭ����� ��Ŀǰ������С܇�У��������Ȼ�������ӷ�ʽ���������ָ���҃ɂ�݆�ӷքe�����҃ɂ�늙C�ӣ�ͨ�^�քe��׃�ɂ�늙C���D�ف�����С܇ǰ�M���ߺ��ˡ�
���@����҃ɂ�늙C�����Կ϶�������ȫ��ͬ���@�͌�ֱ�ӌ��¼�ʹ�O�õ��D��һ�ӣ��ɂ�݆�ӵČ��H�D��Ҳ�Dz���ͬ�ģ����Ա��푪ԓ��ֱ����С܇���܉�E���l(f��)��ƫ�ƣ�Ҳ�ͮa�������^�ġ��߲�ֱ���ĬF(xi��n)�� Ӱ�С܇���߲�ֱ����ԭ��߀�кܶ࣬���磺��·�ϵ��ϵK�݆��˲�g��С܇����������һ�µȵȡ������@Щ�����ǟo�������ģ��҂�ֻ��ʹ��������������Q�@�����}�����ε�����������(j��)С܇��ֱ���r�����H·����ƫ���С܇����늙C��(sh��)ֵ�M���{�� 2.�_�h(hu��n)�c�]�h(hu��n) ���˽��_�h(hu��n)�c�]�h(hu��n)֮ǰ���ڵ����Ϯ���һ�lֱ�����քe�Lԇ�]���۾��ͱ��_�۾�����ֱ����һ�顣�҂����l(f��)�F(xi��n)�����_�۾���ֱ�����]���۾���ֱ��Ҫ���εöࡣ���ϣ��]�а��b�κ�������С܇���ஔ���۾��]�����҂����@����Ҋ���@����ֱ���Ǻ����y�ġ����@��҂���С܇ֻͨ�^늙C�����D�٣����������κ��������ߵķ�ʽ�Q֮�顰�_�h(hu��n)���ơ��������ģ��]�h(hu��n)������ָС܇ͨ�^���N�������Б������Ϣ������(j��)�@Щ��Ϣ�{���Լ����\�ӡ��҂���������n�̌W���У������Ӷ�N�������� ������(zh��n)���ҡ� 1. ͨ�^��׃�Ӿ�����С܇ǰ�M����ʹС܇ԭ�ش��D�� 2.�Lԇʹ�������k�����MС܇��ʹ�䡰��ֱ���� 3.ʹ��늙Cģ�K����С܇�r������Arduino�ı�ʽ���̭h(hu��n)��������setRomeoMoto( )����(sh��)����xԓ����(sh��)���Lԇ����늙C��(sh��)ֵ�O�Þ�����(sh��)��С܇ǰ�M����֮С܇���˵�ԭ��
��2�n ��8�����С܇��һ��(ji��)�n�У��҂��ѽ�(j��ng)�W����ͬ�r�Ӄɂ�늙C��ʹ�҂���С܇�����ǰ�M�����ˡ��@��(ji��)�n�҂��������p݆�����ӣ�С܇�D��������8���衣 ���΄Ռ����� - �p݆�����ӣ�
- С܇�D����
- С܇��8���衣
��������x�� 1. �p݆������ �҂���С܇����2��늙C��2��݆�ӵģ��@�ﲻ���]��Ҫ��֧�����õ��f��݆�������ڲ����@�N�ӷ�ʽ�ęC���ˁ��f�����\�ӕr�������N��r���F(xi��n)�� - С܇ǰ�M�����ˣ��Ϲ�(ji��)�n�ѽ�(j��ng)�W���^��
����݆���D���ٶȲ�ͬ�r��С܇�͕��D�������҃ɂ�݆���D�ӵ��ٶ�֮��Q��С܇�D���돽��С��������҃ɂ�݆���D�ӵ�������ͬ�����������෴��С܇��ԭ���D�ӡ����w����Ҋ�D��
�D3.2.1 �p݆����С܇���\��
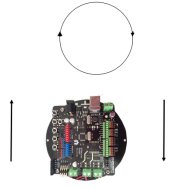
2. ��8������۷� ��������У��҂������^�쵽һ���P���۷�����صĬF(xi��n)�������������ڿ����������w�낀СȦ���ֵ��D�^���������w�낀СȦ������������һ�N��8���衱�����@�N�F(xi��n)�����N����һ����Ȥ�ĿƌW�����ģ��۷��@���������H��������һ�N����ķ�ʽ��֪�Լ�ͬ����Դ�ķ�λ���������w��܉�E�c���洹���ĊA�ǣ������ñ�ʾ�˷䷿��̫ꖺ���Դ����֮�g�������Ƕ���Ϣ�����磺�۷�����8������r���^����ֱ�w��̫ꖽ�����ȣ���˼���f������̫ꖷ����wȥ�����Dz��۵ķ��� ����۷�����8������r���^����ֱ�w��̫ꖽ���180�㣬��˼���f������̫ꖷ����wȥ�����Dz��۵ĵط����� ����۷�����8������r���w��ֱ��ͬ���洹ֱ��������A����15��ǣ���˼���f��������̫ꖽ�60�㷽���wȥ�����Dz��۵ĵط������������۷俴���@�ӵ���Ϣ�r���Ϳ��Ը���(j��)̫ꖵķ����ҵ���Դ�ˡ���Ȼ�������������꣬���߿�����̫ꖵĕr���۷�͕�ʧȥ�@�N��e��������������ˡ� 3. С܇�ߡ�8���ֱ�l�����Ӳ����҂���С܇���۷�һ�����������ġ�8��������أ������f��������ʾ��D�ġ�a���c��형r��w���ϰ�Ȧ���ٴε��_��a���r������r��w���°�Ȧ��Ҫ���F(xi��n)�@��Ч�����҂��l(f��)�F(xi��n)��횝M�����l���� - С܇형r��D��һ���ĕr�g�Ժ��M����r��D�ӣ�
- С܇형r��D�ӵĕr�gҪ�M�������DһȦ����r�Ҳ����ˡ�
��ô���҂�ֻҪ����(j��)����늙C�Ĕ�(sh��)ֵ��_��С܇�DȦ�İ돽���Ķ��y��С܇�DһȦ�ĕr�g���Ϳ����߳�һ��8�ֳ����� �D3.1.2 8�ֈD
�����ֲ����� ������}һ�����D���ęC����С܇ ����(j��)�p݆������С܇��ԭ������׃����늙C���D�Ӕ�(sh��)ֵ��ʹ�������D�������D��ԭ���DȦ���^��һ�¬F(xi��n)����ɱ���3.1.1�� ��3.1.1 늙C�ٶ��cС܇��B(t��i)
�������a �D3.1.3 С܇���D�������D����ԭ���DȦ ���ִ��a��ጣ� ��1��С܇��늙CM1�O��100����늙CM2�O��150���@���r��С܇�������D�� ��2��С܇��늙CM1�O��150����늙CM2�O��100���@���r��С܇�������D�� ��3��С܇��늙CM1�O��150����늙CM2�O��-150���@���r��С܇��ԭ���DȦ�� ������}������8����ęC����С܇ ͬ�W�����˽����p݆����ԭ���Լ������ߡ�8���ֵı�l���ԺͿ��Ԅ��������҂��Լ�����8����С܇�ˡ� �Y���҂�ǰ���f��С܇��8����ăɂ��l�������҂������D���D�Ŀ����Լ��ӕr�Z��Y���������҂��Ϳ��Ծ������������˵���8��������ˡ�����������a���£�����ʾ�������Dz��܈�(zh��)�еģ��҂������Լ�ͨ�^����Ĝyԇ����׃���еą���(sh��)ֵ���ҳ�����늙C�ض���(sh��)ֵ��r��С܇�DһȦ�ĕr�g�� ��������
�D3.2.4 С܇��8��
Ոͬ�W������K����ą���(sh��)���������3.2-1�ı����У������Թ�Ӌ�AȦ�İ돽�� �돽�� (cm) ��3.2.2����ą���(sh��)
��̽��˼���� ͨ�^����Ĝyԇ���҂��ѽ�(j��ng)�ҵ���һ�NС܇��8�ֵą���(sh��)ֵ��Ոͬ�W���^�m(x��)ԇ�{������늙C��(sh��)ֵ��y��С܇�DһȦ�ĕr�g�����F(xi��n)�ׂ��AȦ�돽��С�c֮ǰ��һ�ӵ�8���裬�������P����(sh��)��������ı����С� �돽�� (cm) ��3.2.3 ����(sh��)�б�1
�돽�� (cm) ��3.2.4 ����(sh��)�б�2
�돽�� (cm) ��3.2.5 ����(sh��)�б�3
��ҕҰ��չ�� ��݆ȫ��ȫ�C�� ��݆ȫ��ȫ����C������ͬ���ӵ��b�÷�ʽ�����D��ʾ����ԓ�C���У�����݆�ӳ�120����ã����X݆����朗l��݆��ͬ늙C���B��ÿ��݆�Ӷ��ɪ������M���D����ƺ��ٶȿ��ƣ�����ڽY����ԭ���������ǰ݆��ǰ݆����C����ǰ݆��������݆�ӱ��ֳ�ʼλ������ͬ���ٶ��D�ӕr�����䱾�w��ԭ����돽���D�\�ӣ�������݆�ӌ���Ƕ���ͬ������ͬ�ٶ��ӕr�����w����ԓ����Ƿ�����ֱ���\�ӡ�ʩ���m��?sh��)Ŀ��ƣ�����ԓ�C�����F(xi��n)�ęC���˱��w�܉�������ָ����܉�E�\�ӣ����кܸߵ��\���`���ԡ�����ԓ�C�������w�Y�����^���s�����ÿ����������Ҫ��6���ŷ�늙C�M�к������ƣ��Ҍ��ڷ�����ӿ��ƾ������^��Ҫ����˿����y���^�� �D3.2.5 ��݆ȫ��ȫ����C��
������(zh��n)���ҡ� ����(j��)�ڶ����b���L�ȵă��ݣ��Lԇ���b��������С܇ǰ�M�����ˡ����D�����D��ԭ���DȦ����8���衣��������������Ć��}�Լ��M��Q�k����
��3�n ����С܇����Ȼ�磬�кܶ����x�ǎ��|�ǵġ���ǰ�M�ĵ�·�ϳ��F(xi��n)�ϵK��r���������C�ǵ�����Լ����|��ȥ�_���ϵK��ķ���Ȼ�r�ظ�׃ǰ�M·���@��ǰ�С����@����x���|�������x��֪�����Ϣ������������ͬ�ӵģ����҂���С܇��ǰ�M�^���У������ϵK����Ҳ����ͨ�^��Ƶ��|��ȥ̽�����l(f��)�F(xi��n)��������ǰ�M���@��(ji��)�n���҂��Lԇ�oС܇�b���|�ǣ�ʹ�҂���С܇��ǰ�M�ĵ�·�����ܱ��ϡ� ���΄Ռ����� 1. �˽��|���������� 2. ʹ���|�����������ϣ� 3. ʹ�÷�������������ϡ� ��������x�� �|�������� �|�������������D����һ�����ý��|Ƭ���F(xi��n)�z�y�|�����ܵ���Ӳ�������Ҫ���ڙz�y����|����r�����磺���M�r�����ڙz�y�ϵK����Ԍm�r�����ڙz�y���ڵȵȡ��|����������һ�N��(sh��)�ւ��������������ϵK��r��ֵ��0����tֵ��1�����|�������ϵK��r���|���������ϵ�LED�������҂����Ը���(j��)�|��������ֵ��׃�����{��С܇ǰ�M���� �D3.3.1 �|�������������ң�
�����ֲ����� ������}һ��ʹ���|����������������С܇ ͨ�^�@�����҂��oС܇�b�����|�ǣ��@���҂���С܇���ܸ����xһ�����ɱ����ˡ����E�� 1. Ӳ��� ���|��������һ��һǰ�����w���bλ�ÿ��Ը���(j��)���H��r������Ҳ����ʹ�ö����|�������������b��С܇�ϣ�ע�⌢�|���������ăɂ��|�ǽ������档���O��߅���|�����������ڔ�(sh��)�ֿ�2��С܇ǰ����|�����������ڔ�(sh��)�ֿ�3���҂�Ҳ���Ԍ��F�z�����|�����������|���ϣ��Ա�U���|���������ĸ�֪������ ����ʾ���������Ӿ��r��������ڔ�(sh��)����_4��5��6��7��0��1�ϡ� 2. �������� �҂����Ը���(j��)�|��������ֵ��׃�����{��С܇ǰ�M�����磺����ǰ�|����������һ���z�y���ϵK��r��С܇���˻��ߺ����Ժ�������������D�����҂�����(j��)�����˼·�M�о��̣�ͬ�W�����Ը���(j��)���H��r�{����������С܇늙C��(sh��)ֵ�����˕r�g�����D�����D�ȡ����������У�С܇�����������ǰ�������oՓ�Ă��z�y���ϵK�����ͬ�r�z�y���ϵK�С܇��������һ�ξ��x�������D�����D�� �D3.3.2 С܇���α��� ���ִ��a�f�����£� ���@�������У�ֻҪ��һ���|���������z�y����ֵ�顰0����Ҳ���Ǚz�y���ϵK��f���҂�С܇����1��犣������D�����С܇�ɂ��|��������һֱ�z�y�������w��Ҳ���ǔ�(sh��)ֵ�顰1���r��С܇ǰ�С� �������d����҂������B���늳أ��M���{ԇ�ˡ����С܇���Ա����ˆ
������}����ʹ�Ô�(sh��)�ַ������������������С܇ �҂����Ը���(j��)��(sh��)�ַ����������ֵ��׃�����z�yǰ���Ƿ����ϵK�ע�⣬��(sh��)�ַ�����������z�y���ϵK�ֵ��0���@�r���҂���С܇��ԓ��ȡ��ʩ��ֹͣ���D���ȵȣ�������������������ԙz�y��ǰ��10cm�ľ��x�������҂���С܇�z�y���ϵK���Ժ���ֱ�ӹՏ������ú��ˡ� �ڰ��b�ĕr��Ҫ��(sh��)�ַ�����������ĸБ��^���⡣�������Ҹ����bһ���� ����(sh��)�ַ�����������z�y���ϵK�ֱ�����D�� �D3.4.3 ������С܇ ���ִ��a�f�����£� ���@�������У�ֻҪ��һ��������������z�y����ֵ�顰0����Ҳ���Ǚz�y�����w���f��ǰ��10cm�ԃ����ϵK����F(xi��n)���҂�С܇���D1��犡����С܇�ɂ������������һֱ�z�y�������w��Ҳ���ǔ�(sh��)ֵ�顰1���r��С܇ǰ�С� ��̽��˼���� ����ı��ϳ������ʹС܇�ɹ�����ϵK����F(xi��n)�@��ǰ�С����ǣ�����҂����ý��������������һ�����ε��Ԍm��С܇��ο����߳��@���Ԍm�أ� ��ҕҰ��չ�� 1.�|������ �����x��ԭβĿ�o�|�ǡ��ߵ��p��Ŀ��Ĥ��Ŀ���x���|���˻��⣬�����N���1���|�ǡ��|���L�����x��ֻ���۵����Ϸ������x��ӵĕr���@�ɸ��|�ǿ��Dz�ͣ�ؔ[�������|����̽�����nj��ҫC������_�� ���|������Ҫ�ĸ��X���٣������X���|�X�� �X�Ĺ��ܡ��|���܉�������x����ʳ�����ż����̽�����wǰ���Пo�ϵK�����Щ���x�У��|��߀��������̎����������ܾݼ�ڽ���r�Á���ס���x��ħ�����x�Á���ʳ���Ӿ�����|����ˮ����ƽ�����w��ˮ���x�t�Á���������� ��Ҋ���Ԍm�D���£�
�D3.3.4 ��Ҋ�Ԍm �^��������D�����y�l(f��)�F(xi��n)���C�������Ԍm������ijһ�����߿���ʹ�C�����߱�]�г����Ԍm��ÿ���ط����@�����Ԍm��һ�㷽�����҂��Q��������ߵķ���������Ҏ(gu��)�t���Q���҂����ߵķ���������Ҏ(gu��)�t�� �ڱ��Ŀ���҂�����������Ҏ(gu��)�t��ʩ���Ԍm���΄ա��ٶ����Լ���һ����ڵ��Ԍm�����а�����Ҏ(gu��)�t���ߣ���һ����������ȥ��������ȵĉ��ڣ��Դ_��ǰ�M�ķ�������������ǰ���Է�����ǰ�M���^����ײ��ǰ���Տ�̎�ĉ��ϡ�����������������(j��)���֫@�õĉ����|����Ϣ���������ķN�Дࣺ - �����ֺ�����ǰ�������ֶ����������ڕr�������D����
- ���������������ڣ�����ǰ���������������ڕr�������D����
- �����ֺ�����ǰ�������ֶ��������ڕr�����D����
- �������������ڣ�����ǰ�����������������ڕr��ֱ�ߣ�
���C�������Ԍm�r���҂������ÙC���˵��|���������������҂��������֣��ԫ@ȡ���M�������Ϣ�������@ȡ���|����Ϣ�����Д࣬�Դˁ�Q�����ߵĄ��������Ԍm�ęC����������Ҫ�ɂ��|�����������քe���ڙC�������л����ҡ��С��C���˿���ʹ�ûҶȂ������Д��Ƿ�ص��K�c��  �D3.3.5 ����Ҏ(gu��)�tʾ�� ������(zh��n)���ҡ� ����ñ���С܇���Ԍm�����Ĵ��a�������OӋ˼·��������ęM���ϡ�
��4�n ������С܇�҂��ęC����С܇��̎�߄ӵĕr������������_�A�ĵط��������Ԅ�ͣ�����˷�ֹС܇�����_�A��Ȼ��ǰ�ߣ��҂���Ҫ�o�����b�����Ă�������ʹ�������з����书�ܡ� ���΄Ռ����� 1��ʹ�Ô�(sh��)�ַ�����������M�з����䣻 2��ʹ�ó����������M�з����䡣 ��������x�� ��(sh��)�ַ�����������İ��b
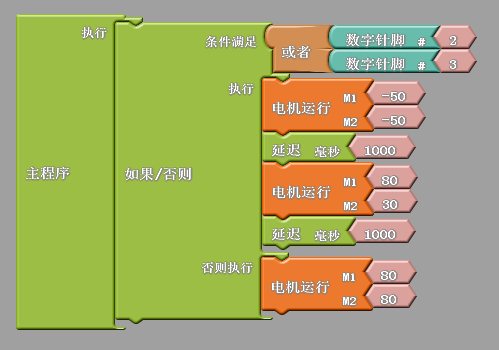
�D3.4.1 ��(sh��)�ַ�������������bλ�� �҂��ѽ�(j��ng)�ڡ���(chu��ng)��LED���Լ����ԄӸ�ۙ�L�ȡ�����ʹ���^�˔�(sh��)�ַ������������ʹ�÷�������٘�������@����Ҫ��Bһ������������С܇�r��ԓ�������İ��b��ʽ����(sh��)�ַ����������һ�㰲�b��݆��ǰ�����C���˵����أ����b�߶ȑ�ԓС�ڵ���10cm�����w���Ը���(j��)���H��r�{�����Դˌ��F(xi��n)̽�y����IJ�ƽ�Ȼ����_�A���{���C����ǰ�M���F(xi��n)�����书�ܡ����������������������Ҫ��һ��һ�Ұ��b��С܇ǰ��������l�����S��Ҳ���Ը���(j��)�ψD���b�Ă��� �����ֲ����� ������}һ��ʹ�Ô�(sh��)�ַ���������������ķ�����С܇ �������� �҂����Ը���(j��)��(sh��)�ַ����������ֵ��׃�����{��С܇ǰ�M����ע�⣬��(sh��)�ַ�����������z�y�����ϵK�ֵ��1���@�r���҂���С܇��ԓ���ˡ� ���������У�����(sh��)�ַ�����������z�y�����ϵK��_�A���F(xi��n)����������һ�ξ��x�������D�� �D3.4.2 ������С܇ ���ִ��a�f�����£� ���@�������У�ֻҪ��һ��������������z�y����ֵ�顰1����Ҳ���Ǚz�y�������w���f���˕rС܇���_�A��߅�����҂�С܇����1��犣������D�����С܇�ɂ������������һֱ���ԙz�y�����w��Ҳ���ǔ�(sh��)ֵ�顰0���r��С܇ǰ�С�
�B�Ӱ����c��X�������������a���{ԇС܇��������_��ֱ�ߣ��^�����С܇�Ƿ��з����书�ܡ�
������}����ʹ�ó��������������ķ�����С܇ �������� �҂�Ҳ����ʹ�ó����������팍�F(xi��n)С܇�ķ����䣬�����������İ��b����(sh��)�ַ����������һ�ӣ�������档 
�D3.4.3 ������С܇ ���ִ��a�f�����£� ԓ�������ó�����������z�y�����c����ľ��x����������������y�����ľ��x����10�����w��(sh��)���Լ������O������ʾ�z�y�����ϵK��Ҳ��Ҳ���ǵ��_�_�A߅������С܇���˃���犣�Ȼ�����D�������D��������xС��10��С܇����ԭ���Ġ�B(t��i)�^�m(x��)ǰ�M���������z�y�_�A�ľ��x���Ը���(j��)���H��r�{������
��̽��˼���� ˼����(sh��)�ַ��������������Ч�z�y���x��ʲô��10cm�������Ч���x�^�L���������_�A�ĕr��߀�ܱ���ˤ���_�A�ġ����K���\������X���^֮��(sh��)�ַ������������ʹ�ó����������M�з����䣬��ʲô��(y��u)�ݣ�
��ҕҰ��չ�� �����ݙC���� ��ͨ�^����ČW�����҂���С܇�z�y�����ݣ��@�����M�ѽ�(j��ng)���˺�����˽⡣����С܇����ô�����ݵ��أ�ͨ�^�@�����ֵ�ҕҰ��չ���҂����˽�С܇�����ݵĻ���ԭ�������dȤ��ͬ�W�������Mһ���о���
(l)�Ď�ʽ �Ď�ʽ�������b�õ�ԭ��������Ď��b���\��܇��̹�ˣ���ԭ�����Σ����gҲ���^���졣���������ݵ�������Εr���Ñ�ͨ�^�m���������ɂȵ����z�Ď��������������棬Ȼ����@�Ă�܇݆���������Ď��o�������o�������Ԅ�������ǵȹ��ܡ�
�Ď�ʽ�Y������Ч�ʱ��^�ߣ����ߕr���IJ��Ӻ�С���\�ӷdz�ƽ��(w��n)����ʹ�õ��η����^�V����һЩ��Ҏ(gu��)�t�Ę�����Ҳ��ʹ�á������@��b���Դ��ںܶ��֮̎:�������\�Ӳ����`����Ǖr�ژ���߅����ɾ�ĉ�������������һ���ēp�ģ���ƽ��ʹ�����������^�����D�������㣬�@Щ���}�����������ճ������е��ƏVʹ�á�
(2)݆�Mʽ ݆�Mʽ�������b�ð�݆�M��ʹ��С݆�Ă���(sh��)�ɷ֞��݆�Mʽ����݆�Mʽ�Լ���݆�Mʽ����݆�Mʽ�Y����(w��n)�����^��������^������Ҫ���˅f(xi��)�����ܱ��C���ĵķ�(w��n)�������p݆�Mʽ�m�܌��F(xi��n)�������ǣ����������w�e������ƫ�أ�Ӱ�������ʹ�÷�����
݆�Mʽ�������b�õĻ�ӷ����V���\���`����������ݕrƽ��(w��n)�Բ��ߣ���������^��ʹ�����߸е����m�����⣬݆�Mʽ�������b���w�e�^���y����ͨסլ������ʹ�á�
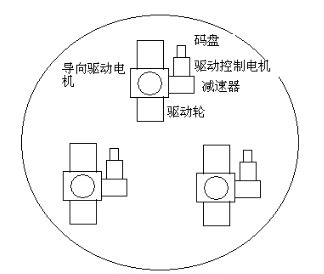
(3)����ʽ ���ڵ��������b��һ�㶼���ò���ʽ���������݈�(zh��)�ЙC�����q朗U���C���M�ɡ��ϘǕr�Ȍ�ؓ��̧�ߣ���ˮƽ��ǰ�Ƅӣ�����؏��@�ɂ��^��ֱ������һ�Θ��ݡ�����ʽ�������b��ģ��������ǵĄ��������^��ҕ����ʽ�C���ˣ����ö��l�Cе�Ƚ���������֧���������ǵ�ԭ����
����ʽ�������b�����Ǖr�\��ƽ��(w��n)���m�ϲ�ͬ�ߴ�Ę���;���������Ƶ�Ҫ��ܸߣ��������^���s����ƽ�����ߕr�\�ӷ��Ȳ����������� ������(zh��n)���ҡ� ����C���x��ʹ���|������������(sh��)�ַ�������������������������������ܱ������ܷ����������С܇����ִ�����ɡ�ӛ�ð��㾎�̵�˼·��������ęM���ϡ�
��5�n Ѳ��С܇һ ǰ��ČW���У��҂�ͨ�^�|���������ɹ��ؽoС܇�b�����|�ǣ��@һ��(ji��)�n�У��҂����Lԇ���oС܇�b���۾���ʹ�҂���С܇���Էֱ����������ɫ߀�ǜ\ɫ���Ķ����������ھ��ķ���ǰ�M�� ���΄Ռ����� - �˽�Ѳ����������
- С܇����Ѳ��ǰ�M��
��������x�� 1. MINIѲ�������� MINI�����D��Ѳ���������Է�(w��n)����TTLݔ����̖�����C�����M�а����ߺھ��ĸ�ۙ�����ԙz�y�ױ����еĺھ���Ҳ���ԙz�y�ڱ����İ�������ɫ���ƽ����ɫ���ƽ��ԇ��һ�£��ܷ�С܇ͨ�^�@�N����������һ�l��ɫ�ľ�ǰ�M�أ�
�D3.5.1 MINIѲ��������
2. С܇��ֱ���Լ��ߡ�S���ͷ��� ��1���ذ��ǰ�ɫ�����Ǻ�ɫ�ġ�С܇Ҫ�����@�lֱ������Ҫ�b���ֱܷ�ڰġ��۾�������Ѳ����������
�D3.5.2 С܇��ֱ���D
�����ߺ��еăɂ�MINIѲ��������һ��һ�Ұ��b��С܇�ױP�ϣ��ɂ�������֮�g�ľ��x���ںھ����ȡ���С܇�����ںھ��ϣ����҃ɂ�MINIѲ�����������ںھ��ϣ��� С܇�����F(xi��n)���D���N��r��;�мtɫ�A�c����Ѳ������������ a:һ����r�£�С܇����Ѳ�����������z�y�����ھ���Ҳ��������Ѳ�����������ھ��ϣ���С܇��ֱ�� b:������Ħ���������ȸ��N���أ�С܇����ƫ����С܇����ƫ�r��Ҳ������߅�������z�y���ھ�����߅�������z�y�����ھ����҂�ҪС܇���D���� c:С܇����ƫ�r����Ѳ���������z�y���ھ�����Ѳ���������z�y�������҂�ҪС܇���D���� ���w��rҊ�D��
�D3.5.3 С܇��ֱ�������D
- �^�조S���͈D���҂��l(f��)�F(xi��n)�oՓ�����^�_ʼ�ߣ�С܇��Ҫ���ҹՏ�����֮�߈AȦ������һ�N�Տ���ʽ����D��
�D3.5.4 С܇�ߡ�S���͈D �˕r�����N��r�� ��С܇���҂��������z�y�����ھ��r��С܇ֱ�ߣ� ��С܇��������z�y�����ھ����҂������z�y���ھ��r��С܇�ҹգ� ��С܇��������z�y���ھ����҂������z�y�����ھ��r��С܇��ա� �����ֲ����� ������}һ��С܇�غھ�ֱ�� ʹ��Ѳ��������ʹС܇�����ھ�ֱ�ߡ� �����҂�������һ�ӣ���С܇��MINIѲ��������ģ�K�B�Ӻá��@��҂����O�����҃ɂ�MINIѲ���������քe�ӵ���(sh��)����_2,3��
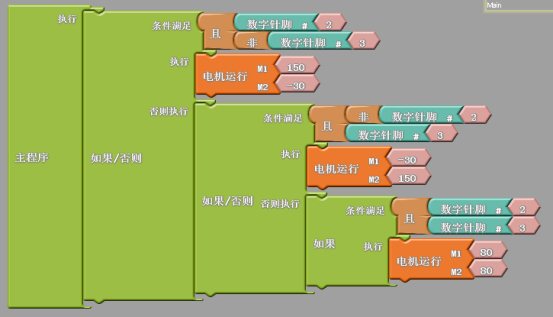
��С܇һֱ�����ھ�ֱ�ߣ���ô�����һ�ȵ�Ѳ���������z�y���ھ����҂��͵����������D���������������£� �D3.5.5 С܇�غھ���ֱ�� ���ִ��a�f������: ���D���ĕr������늙C�Ĕ�(sh��)ֵ������@�����С܇��ֱ���r������ƫ����ܴ����Բ���Ҫ���D���� ������}����С܇�غھ���S�� ʹ��Ѳ��������ʹС܇������S����ǰ�M�� 1. Ӳ��� �Ӿ�����С܇�غھ�ֱ�ߡ� 2. �������� �D3.5.6 С܇��S�� ���ִ��a�f�����£� С܇�ߡ�S���r��ԓ���Ҫ�D������ԓ�D��Ҳ�����f����늙C��(sh��)ֵ��Ҫ���҂������Լ���׃����(sh��)���{ԇ����ʹС܇�ɹ��ߡ�S���͡� ��̽��˼���� - ��һ�ȣ��ó����С܇�c����ͬ�W��С܇ِ�ܰɣ����l���ܳɹ��غھ�ǰ�M�������ȵ��_�K�c����һ�룬��ô�{������늙C��(sh��)ֵ��ʹС܇�����غھ����M�������ߵĿ졣�u�r�������¡�
��3.5.1 �u�r����
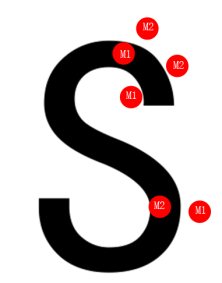
2.�^���D�����߀��ʹ������ij���С܇����Ѳ���߆��һ���ʲô�� �D3.5.7 ��8����·�� ��ҕҰ��չ�� �ҶȂ����� ����Ҷșz�y������������D3.5.8����ʾ��Сģ�K���C���ːۺ��߂������ڙC���˵ĵױP���b�������C�����܉�Ѳ��һ����O�ڰ�ɫ�ذ��ϵĺھ�ǰ�M��������Ҳ�������Q�顰Ѳ����������������һ��LEDС����һ���������M�ɡ� �D3.5.8 ģ�M�ҶȂ����� ���Ĺ���ԭ�����@�ӵģ�LEDС������������ṩһ�����m(x��)��(w��n)���Ĺ�Դ�����l(f��)���Ĺ⾀�����淴����������z�y����������ɫԽ�\���͕��и���Ĺ⾀�����䵽������裬Խ��tԽ��Ĺ⾀���������ա��⾀���ȵ�׃���͕�ʹ����������ֵѸ�ٰl(f��)��׃�����҂��Ă�����������ه�@�N��Ϣ��z�y����ĻҶȵġ�ģ�M�ҶȂ������R�e�ɫ�ij���Ҋ���档�@���҂�������Ҷșz�y����������ģ�M��0�� �D3.5.9 ģ�M�ҶȂ������R�e�ɫ ������(zh��n)���ҡ� - �������߅�лҶȂ�������Ԓ��Ҳ����ԃ���ώ��������ʹ����С܇���ھ�ǰ�M�
- ̽��˼������ġ�8����Ҫ��ô��Q�أ����뵽�õ��k���ˆ
������뷨�����ɡ�
��6�n Ѳ��С܇����ǰ��ČW���У��҂��J�R��MINIѲ����������Ҳ�ɹ�ʹ��Ѳ���������M���˺��ε�Ѳ���ߡ������ϣ��C���˳���Ҫ��ֱ����������߀�и��N���s��·�ڡ��@��(ji��)�n���҂�����LԇС܇�߶���·�ڲ��W������ʮ��·�ڡ� ���΄Ռ����� 1.��������·�ڣ� - С܇�߶���·��;
- С܇��ʮ��·�ڷ�����
��������x�� ����·�ڷ��� Ѳ���߶���·�ڣ������y��������һ�l�Ի�ĵ�·���˕r������Ѳ��������ͬ�r�z�y���ھ�����ԓ��ǰҎ(gu��)����ԓ����·�ڑ�����߀�������D���� ����·��ʾ��D���£� �D3.6.1����·�� �����ֲ����� ������}��С܇Ѳ���߶���·�� ����·�����ψD���҂�ҪʹС܇��a���l(f��)����(j��ng)�^b����K���_c��С܇�ھ�·�B���ϣ��������κθ�׃�������ϣ�������֮ǰ����Ѳ��С܇�Ļ��A�ϣ����Ӄɂ�Ѳ��������ͬ�r�z�y���ھ��r��С܇�Ļ�Ӵ��a�� ��������
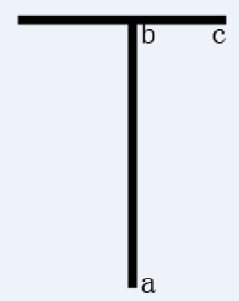
�D3.6.2 С܇Ѳ���߶���·�� ���ִ��a�f�����£� �˞鶨�x�����С܇������������·�ڣ����ҹա����w�������£����a��ǰ��ɂ��x��Y����С܇�غھ�ֱ�ߕrһ�ӵģ��@�Ǟ��˴_��С܇������ab��ֱ�ߡ���С܇���_����·�ڣ�С܇����ԭ���DȦ90�ȣ��DȦ�ĽǶ��������t�r�g�Q���������t�r�g����С܇����늙C��(sh��)ֵ������·�ڴ�С�ȶ�N���؛Q���ģ��҂���Ҫͨ�^����Ĝyԇ�õ��@���r�gֵ�� ��̽��˼���� - .�^���D�������������̣�С܇߀��a��b������_c���ʲô��
�D3.6.3 ʮ��·��
2.�^���ψD��ҪʹС܇��a���l(f��)����(j��ng)�^b����K���_d�c��߀����ʹ������ij���������Ҫ�Ąӣ� ��ҕҰ��չ�� ��֮����Ѳ���� ���ֻ��һ��Ѳ�������������������Ѳ��� ���ֻ��һ��Ѳ���������������҂�̎���ķ������^���⡣��С܇������λ�÷��ڿ����ھ���Ȼ������ںھ��ϡ���С܇�z�y���ھ��ĕr���������D��ͬ�ӣ���С܇���D�Ժ��l(f��)�F(xi��n)�����˕rС܇�������D�������͏����ǰ�M������҂����l(f��)�F(xi��n)С܇���ա�֮���Ρ����۾�Ѳ��ǰ�M�ˡ�����҂��Q�@�N����������֮����Ѳ������ ����҂���С܇�����˺ھ�����߅������ھ����У��O����С܇�����ھ������D�����������D�����Դ˕rС܇��ԭ�ش��D�����Ծ��w�����Լ�С܇���õij�ʼλ�ú���Ҫ�� ������(zh��n)���ҡ� - ���С܇�������·���У����^һ��ʮ��·�������D�(�����a��(j��ng)�^b��c������_d)�����˼·��������ʾ���O��׃����
- ������С܇��d��(j��ng)�^c������_b���ُ�b����ԭ·���ص��_d�
3.�Ϲ�(ji��)�n�����ġ�8���֣����ʹ��Ѳ������������ˆ
  
�D3.6.4 ʮ��·��
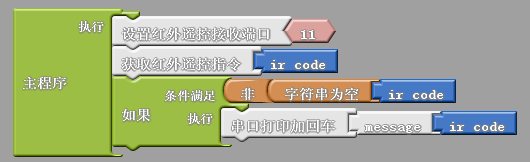
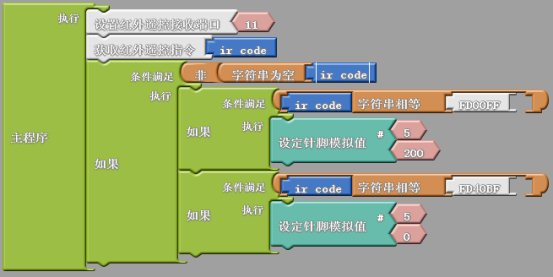
��7�n С܇�C�τ�(chu��ng)��ͨ�^�@���µČW�����҂��J�R���S������˼�Ă������������������S����Ȥ����Ʒ����С܇�@һ�µČW���У����Ҳ�϶��кܶ��Լ����뷨���@��(ji��)�n���҂��Lԇ���@Щ�뷨׃�ɬF(xi��n)���ɡ� ���΄Ռ����� 1. �����b�ؿ��ƻ��ߴ��ڿ��Ƶij����y��Ѳ߉܇�� 2. �Լ��OӋ���Lԇ���F(xi��n)һ�N�Є�(chu��ng)���С܇�� 3. ���u�Լ����u��(chu��ng)��С܇�� ��������x�� ���ڿ��� ��ArduBlock�������������һ�����xȡ���ڡ�ģ�K��ͨ�^ԓģ�K�҂������xȡ���ڴ��ڱO(ji��n)ҕ����ݔ���ֵ�����xȡ���ڡ�ģ�K��D��ʾ�� �D3.7.1 �xȡ���� ���ڱO(ji��n)ҕ�����D�� �D3.7.2 ���ڱO(ji��n)ҕ��
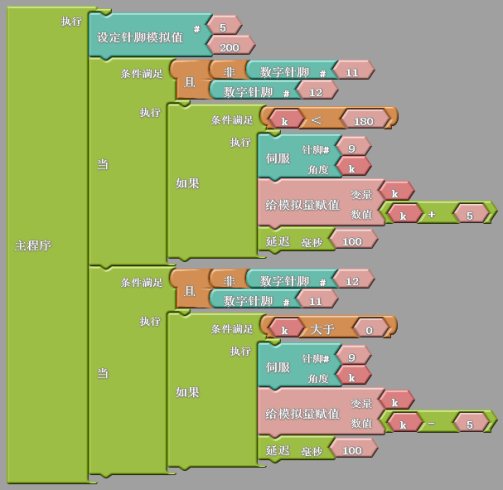
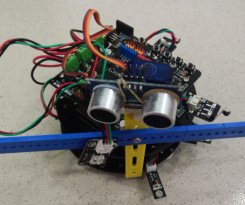
�҂�����˹��λ��ݔ�딵(sh��)�֣����c������ġ��l(f��)�͡����o�����xȡ���ڡ�ģ�K�����x���҂�ݔ��Ĕ�(sh��)�֡��҂����ԽY�ϡ����ڴ�ӡ�ӻ�܇��ģ�K���ڴ��ڱO(ji��n)ҕ���д�ӡ���l(f��)�͵Ĕ�(sh��)ֵ�������e��һ�����εĴ��ڿ���LED����Č��������D: �D3.7.3 ���ڿ���LED���� ���@�������У�����҂��ڴ��ڱO(ji��n)ҕ���аl(f��)�͡�1�������ڔ�(sh��)����_8̖�ڵ�LED�����c����ͬ�ӣ�����҂��ڴ��ڱO(ji��n)ҕ���аl(f��)�͡�2����LED����Ϩ�硣 �����ֲ����� �b�ؿ��Ƶ���Ҫ˼·���b���L��һ�ӣ��Ȍ��ض��İ��I��a���ٽo�������I�x�茦����ָ����磺����2��С܇ǰ�M������8��С܇���ˣ�����4��С܇���D������6��С܇���D�ȡ� ���ڿ��ƏČ��|���f�����b�ؿ��Ƹ��Ӻ��Ρ��҂��ڴ�����ݔ�딵(sh��)ֵ�����@Щ��(sh��)ֵ�cС܇�Ą��������������磺ݔ�롰2��С܇ǰ�M��ݔ�롰8��С܇���ˣ�ݔ�롰4��С܇���D��ݔ�롰6����С܇���D�ȡ� 3.�����y�� �������������\����С܇�ϣ�������z�y�ϵK��@���ЃɷN��N̎�����������磺�����������z�y���ϵK�����ͨ�^LED���߷��Q���l(f��)�������ٱ��磺�����Б���ǰ�����ϵK��r��С܇�p�١����x�ϵK��Խ�����ٶ�Խ����ֱ��ͣ���� 4.Ѳ߉С܇ Ѳ߉С܇���P�I����С܇Ҫ��̎���ߣ�߀���Լ��϶�C�M�п��ơ����w�������Կ��]���������������b�ڶ�C�ϣ����ö�C�ĽǶ��D�ӣ��{�������������ķ����cС܇�Լ������M܉�E����ϣ��M��ȫ��λ����Ƕȵ�Ѳ߉�z�y�� ��C�������Լ�С܇�����w���b���ԅ����D�� �D3.7.4 ��������C���bʾ��D
5.������(chu��ng)��С܇ ͬ�W��Ҳ���Լ����Լ����뷨���������Ђ�����ɫ������С܇�� ��̽��˼���� ���ڿ��Ƶ�С܇����Ó�x��X���������ԣ�ʹ�ô��ڿ���С܇���Dz���������С܇���Єӷ�����������ô��Q�أ� ��ҕҰ��չ�� ��(chu��ng)��С܇--�Z�����Ƶ�С܇ ԓС܇������ЌW�W���OӋ������ԓ�Z������С܇���Դģ�K�����C����ģ�K���t��y��ģ�K����ģ�K��ƽ��ģ�K��늙C��ģ�K6��ģ�K���ɡ�����֮�g���Pϵ��D��
�D3.7.5 ����ģ�K�Pϵ�D
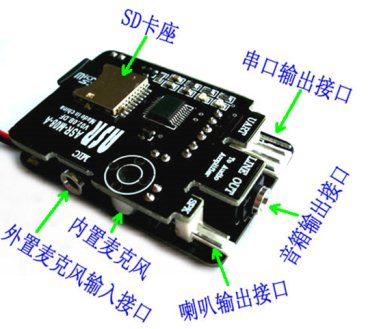
�Z�Կ���С܇�����C����ģ�K��늙C��ģ�K���Դģ�K��늡��Ñ���C���˰l(f��)��ָ�����ģ�K���ܣ�����̖��ݔ�o���C����ģ�K�����C����ģ�K��ֵ̎�������·��ؽo��ģ�K��ƽ��ģ�K����(j��)�C������̎�ΑB(t��i)����ֵ�o���C����ģ�K���t��ģ�K�ɼt�����������(j��)ǰ���ϵK���h������ֵ�o���C����ģ�K��������֮���C���˿��Ը���(j��)�Ñ��l(f��)����ָ��F(xi��n)ǰ�M�����ˡ����D�����D�����y�ϡ�ƽ��z�y�ȹ��ܡ� �������ģ�K֮ǰ���ѽ�(j��ng)������C�����@��҂���Ҫ�J�Rһ����ģ�K�����D�� �D3.7.6 ��ģ�K ԓ��ģ�K��һ�K�·��ASR M08-A�����������L����һ���P���M�ɡ����Խ����˰l(f��)���ķ��ض�����������̖�D�������̖����ݔ���o��Ƭ�C����Ƭ�C̎�����ֵ���ؽo��ģ�K������(j��)���ص�ֵ����SD�����ض������l�ļ�������(zh��)���ض��Ą������C���˸���(j��)ָ������l�ļ��r����Ҫ��AD4��ʽ�����l�ļ���������Ҫ����ͨ��mp3��ʽ�����l�ļ��D�Q��AD4��ʽ�ٴ���SD�����������\�С� ������(zh��n)���ҡ� ��x�o��ͨ�ţ�ͨ�^�o������Q���ڿ���С܇���z���}������������k����Ҳ�����M�ЇLԇ��
��䛣�Arduino�C���˽̌W��
�����õ���Arduino�̌W�����±���ʾ����Arduino�Ї�����DFrobot�ṩ��DFrobot�aƷ���Ԍ�����؈�϶�����ُ�I���ٷ��̳ǵ�ַ�� http://www.dfrobot.com.cn
| | Romeo ����һArduino���ݿ����� | | ��(sh��)��ʳ���~��ɫLED�l(f��)��ģ�K(Arduino����) | | ��(sh��)��ʳ���~�GɫLED�l(f��)��ģ�K(Arduino����) | | ��(sh��)��ʳ���~�{ɫLED�l(f��)��ģ�K(Arduino����) | | | | ��(sh��)�ִ��oģ�K(Arduino����) | | | | | | ��(sh��)�����A�ǂ�����(Arduino����) | | | | �����x�t�┵(sh��)�ֱ��ς�������������������� | | | | | | ģ�M�h(hu��n)���⾀������(Arduino����) | | | | | | | | | | | | | | | | | | ģ�MLM35���ԜضȂ�����(Arduino����) | | 7.4V 2200MA �늳� �������늱��o�壩 | | | | | | | | | | | | | | | | | | | | | | | | | |
�oArduino�S�̵�һ�c�f��
��Arduino��(chu��ng)��C���ˡ��n�̞��_Դ�n�̣��κΏS�̿���ʹ���n���YԴ�M�����ã�Ҳ�����Ľ̲����m���Լ��aƷ���������ƵĮaƷ����Ҫ�_�l(f��)�������n�̣�Ո(li��n)ϵ�҂��Fꠣ����w�ĺ���Ҫ�����£� - ���M�ṩ2�������������������҂��F��_�l(f��)�n�̣�������(j��)�҂����n���OӋ���ṩ���P�����ģ�
- �_�l(f��)���n���YԴ����w�҂����У��҂��F��Й����M�ṩ�ھW(w��ng)�j�ϣ������Ў���ʹ�ã�
- �n�̵��OӋ���҂��FꠛQ�����S�̰����҂��������ṩ���ļ��ɣ����ɸɔ_�҂����аl(f��)������
�� �����x����
���c���������� ������ ������
������Word��ʽ�ęn51�����d��ַ��
 Arduino��(chu��ng)��C���˽̲�10.12.doc
(13.67 MB, ���d��(sh��): 83)
Arduino��(chu��ng)��C���˽̲�10.12.doc
(13.67 MB, ���d��(sh��): 83)
2018-12-20 10:27 �ς�
�c���ļ������d����
2 ���d�e��: �ڎ� -5
| 



 [����朽�]
[����朽�]

 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664
































































 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��