摘要
反饋控制系統(tǒng)的規(guī)律是:一方面能夠有效地抑制一切被包在負(fù)反饋環(huán)內(nèi)前向通道上的擾動(dòng)作用,反饋閉環(huán)控制系統(tǒng)對(duì)于被負(fù)反饋環(huán)包圍的前向通道上的一切擾動(dòng)(Kp變化、電網(wǎng)波動(dòng)、電阻變化、勵(lì)磁變化)都能有效的加以抑制;另一方面,則緊緊的跟隨著給定作用,對(duì)給定信號(hào)的任何變化都是唯命是從的。反饋控制系統(tǒng)緊緊跟隨給定作用是對(duì)給定信號(hào)(給定穩(wěn)壓電源Un、反饋量檢測(cè)元件精度a)的任何變化唯命是從。
速度調(diào)節(jié)及抗負(fù)載和電網(wǎng)擾動(dòng),采用電壓內(nèi)環(huán)的三PI調(diào)節(jié)器,可獲得良好的動(dòng)靜態(tài)效果。為保證快速性,電壓環(huán)采用比例調(diào)節(jié)器。電流環(huán)校正成典型Ⅰ型系統(tǒng)。為使系統(tǒng)在階躍擾動(dòng)時(shí)無(wú)穩(wěn)態(tài)誤差,并具有較好的抗擾性能,速度環(huán)設(shè)計(jì)設(shè)計(jì)成典型Ⅱ型系統(tǒng)。根據(jù)轉(zhuǎn)速、電流雙閉環(huán)調(diào)速系統(tǒng)的設(shè)計(jì)方法,用Simulink做了帶電流補(bǔ)償?shù)碾妷贺?fù)反饋直流調(diào)速系統(tǒng)進(jìn)行仿真綜合,分析系統(tǒng)的動(dòng)態(tài)性能,并進(jìn)行校正,得出正確的仿真波形。
在直流調(diào)速系統(tǒng)中,轉(zhuǎn)速、電流雙閉環(huán)直流調(diào)速系統(tǒng)是應(yīng)用最廣的直流調(diào)速系統(tǒng),傳統(tǒng)的設(shè)計(jì)方法為工程設(shè)計(jì)方法,它對(duì)被控對(duì)象的模型做了理想化和近似處理,故工程設(shè)計(jì)方法是一種近似的設(shè)計(jì),而對(duì)一些高性能系統(tǒng)要求起制動(dòng)超調(diào)小、動(dòng)態(tài)速降小、恢復(fù)時(shí)間短,則需采用更為先進(jìn)的控制策略。本文對(duì)三閉環(huán)直流調(diào)速系統(tǒng)進(jìn)行設(shè)計(jì)并仿真。仿真結(jié)果表明:電壓內(nèi)環(huán)的三閉環(huán)調(diào)節(jié)器使能系統(tǒng)具有更好的調(diào)節(jié)品質(zhì),具有更強(qiáng)的魯棒性和抗干擾能力。
為了獲取良好的靜、動(dòng)態(tài)性能,電壓、轉(zhuǎn)速和電流調(diào)節(jié)器一般都采用PI調(diào)節(jié)器,文中設(shè)計(jì)了兩個(gè)調(diào)節(jié)器輸入輸出電壓均標(biāo)出實(shí)際極性,它們是按照電力電子變換器的控制電壓Uc為正電壓的情況標(biāo)出的,并考慮到運(yùn)算放大器的倒相作用。還有調(diào)節(jié)器的輸出都是帶限幅作用的,限制電壓決定了它們的輸出最大值。
本文通過(guò)對(duì)帶電壓內(nèi)環(huán)的三閉環(huán)直流調(diào)速系統(tǒng)各參數(shù)的計(jì)算,設(shè)計(jì)出系統(tǒng)的MATLAB仿真模型,通過(guò)仿真可以看到,系統(tǒng)可以實(shí)現(xiàn)調(diào)速、擾動(dòng)等功能。
目 錄
第一章 設(shè)計(jì)任務(wù)
一、 設(shè)計(jì)目的
二、 設(shè)計(jì)內(nèi)容
三、 實(shí)驗(yàn)(設(shè)計(jì))儀器設(shè)備和材料清單
四、 設(shè)計(jì)要求
1. 技術(shù)參數(shù)
2. 設(shè)計(jì)要求
3. 電機(jī)拖動(dòng)控制系統(tǒng)設(shè)計(jì)與仿真
第二章 理論設(shè)計(jì)
一、 方案論證
二、 系統(tǒng)設(shè)計(jì)
1. 電壓調(diào)節(jié)器設(shè)計(jì)
(1) 選擇電壓調(diào)節(jié)器結(jié)構(gòu)
(2) 計(jì)算電壓調(diào)節(jié)器參數(shù)
2. 電流調(diào)節(jié)器設(shè)計(jì)
(1) 選擇電流調(diào)節(jié)器結(jié)構(gòu)
(2) 計(jì)算電流調(diào)節(jié)器參數(shù)
3. 轉(zhuǎn)速調(diào)節(jié)器設(shè)計(jì)
(1) 選擇轉(zhuǎn)速調(diào)節(jié)器結(jié)構(gòu)
(2) 計(jì)算轉(zhuǎn)速調(diào)節(jié)器參數(shù)
三、 近似校驗(yàn)條件:
第三章 系統(tǒng)建模及仿真實(shí)驗(yàn)
一、 MATLAB仿真軟件介紹
二、 仿真建模及實(shí)驗(yàn)
1. 雙閉環(huán)仿真實(shí)驗(yàn)
2. 三閉環(huán)仿真實(shí)驗(yàn)
第四章 結(jié)論與心得體會(huì)
一、 結(jié)論
二、 心得體會(huì)
第五章 參考文獻(xiàn)
第1章 設(shè)計(jì)任務(wù)自擬控制系統(tǒng)性能指標(biāo)的要求,調(diào)速范圍、超調(diào)量、動(dòng)態(tài)速降、調(diào)節(jié)時(shí)間、抗擾性能等。設(shè)計(jì)系統(tǒng)原理圖,電流環(huán)的設(shè)計(jì),轉(zhuǎn)速環(huán)設(shè)計(jì)、電壓內(nèi)環(huán)設(shè)計(jì),完成元器件的選擇,計(jì)算選擇合理調(diào)節(jié)器參數(shù),并進(jìn)行仿真或?qū)嶒?yàn)驗(yàn)證系統(tǒng)合理性。 1、設(shè)計(jì)目的1.通過(guò)對(duì)一個(gè)實(shí)用的帶電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)的設(shè)計(jì)、安裝、調(diào)試來(lái)綜合運(yùn)用科學(xué)理論知識(shí),提高學(xué)生工程意識(shí)和實(shí)踐技能,達(dá)到素質(zhì)和創(chuàng)新能力進(jìn)一步提升,使學(xué)生獲得控制技術(shù)工程的基本訓(xùn)練。 2.通過(guò)系統(tǒng)建模和仿真,掌握用MATLAB / Simulink工具分析設(shè)計(jì)直流電動(dòng)機(jī)速度控制系統(tǒng)的方法。 3.進(jìn)一步掌握各種直流調(diào)速系統(tǒng)的性能,尤其是動(dòng)態(tài)性能。 2、設(shè)計(jì)內(nèi)容- 理論設(shè)計(jì):根據(jù)所學(xué)的理論知識(shí)和實(shí)踐技能,了解帶電壓內(nèi)環(huán)的基本原理,解決積分調(diào)節(jié)器的飽和非線性問(wèn)題;采用工程設(shè)計(jì)方法設(shè)計(jì)一個(gè)帶電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)(含主電路和控制電路,選擇的元器件,系統(tǒng)的電氣原理圖)。
2.仿真實(shí)踐:根據(jù)所設(shè)計(jì)系統(tǒng),利用MATLAB/Simulink建立各個(gè)組成部分相應(yīng)的數(shù)學(xué)模型,并對(duì)系統(tǒng)仿真模型進(jìn)行綜合調(diào)試,分析系統(tǒng)的動(dòng)態(tài)性能,并進(jìn)行校正,得出正確的仿真實(shí)驗(yàn)波形和合適控制器參數(shù),為搭建實(shí)際系統(tǒng)提供參考。 3、實(shí)驗(yàn)(設(shè)計(jì))儀器設(shè)備和材料清單微型計(jì)算機(jī)及MATLAB仿真軟件 1套 4、設(shè)計(jì)要求
1.技術(shù)參數(shù)⑴ 直流電動(dòng)機(jī):額定功率3KW,額定電壓220V,額定電流17.5A,GD2=5.3Nm 額定轉(zhuǎn)速1980r/min,Ce =0.13Vmin/r,允許過(guò)載倍數(shù)λ =1.5; ⑵ 晶閘管裝置放大系數(shù):KS=33; ⑶ 電樞回路總電阻:Ra=1.25Ω, Rrec =0.3Ω, RL =0.25Ω;L=180 mH ⑷ 時(shí)間常數(shù):機(jī)電時(shí)間常數(shù) Tm=0.162s,電磁時(shí)間常數(shù):TL =0.1s ⑸ 電流反饋系數(shù):β =0.36V/A(10V/Inom ~10V/1.5Inom); ⑹ 轉(zhuǎn)速反饋系數(shù):α=0.0067Vmin/r(10V/nnom ~10V/1.5nnom); ⑺ 反饋濾波時(shí)間常數(shù): Ton =0.02s,Toi =0.002s; 其它未盡參數(shù)可參閱教材中“工程設(shè)計(jì)方法舉例”的有關(guān)數(shù)據(jù)。 2.設(shè)計(jì)要求⑴ 調(diào)速范圍D=10,靜差率S ≤ 5%;穩(wěn)態(tài)無(wú)靜差,電流超調(diào)量 σi ≤ 5%,電流脈動(dòng)系數(shù)Si ≤ 10%;啟動(dòng)到額定轉(zhuǎn)速時(shí)的轉(zhuǎn)速退飽和超調(diào)量 σn≤ 10%,空載起動(dòng)到額定轉(zhuǎn)速時(shí)的過(guò)渡過(guò)程時(shí)間ts ≤ 0.5s。
⑵ 系統(tǒng)具有過(guò)流、過(guò)壓、過(guò)載和缺相保護(hù)。
⑶ 觸發(fā)脈沖有故障封鎖能力。
⑷ 對(duì)拖動(dòng)系統(tǒng)設(shè)置給定積分器。 3.電機(jī)拖動(dòng)控制系統(tǒng)設(shè)計(jì)與仿真根據(jù)所提供電動(dòng)機(jī)參數(shù),畫(huà)出帶電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)結(jié)構(gòu)圖,根據(jù)電流超調(diào)量、轉(zhuǎn)速超調(diào)量、電流變化率等指標(biāo),用工程設(shè)計(jì)方法決定轉(zhuǎn)速調(diào)節(jié)器、電流調(diào)節(jié)器、電壓調(diào)節(jié)器結(jié)構(gòu)和參數(shù),并對(duì)該調(diào)速系統(tǒng)進(jìn)行simulink仿真。
第2章 理論設(shè)計(jì)
1、方案論證系統(tǒng)設(shè)計(jì)理論 按照設(shè)計(jì)多環(huán)控制系統(tǒng)先內(nèi)環(huán)后外環(huán)的一般原則,從內(nèi)環(huán)開(kāi)始,逐步向外擴(kuò)展設(shè)計(jì)原則(本課題設(shè)計(jì)先設(shè)計(jì)電壓、電流內(nèi)環(huán),后設(shè)計(jì)轉(zhuǎn)速外環(huán))。 在三閉環(huán)系統(tǒng)中應(yīng)該首先設(shè)計(jì)電流調(diào)節(jié)器,然后把整個(gè)電壓、電流環(huán)看作轉(zhuǎn)速調(diào)節(jié)系統(tǒng)中的一個(gè)內(nèi)環(huán)節(jié),再設(shè)計(jì)轉(zhuǎn)速調(diào)節(jié)器。這樣的系統(tǒng)能夠?qū)崿F(xiàn)良好的靜態(tài)和穩(wěn)態(tài)性能,結(jié)構(gòu)簡(jiǎn)單,工作可靠,設(shè)計(jì)和調(diào)試方便,達(dá)到本課程設(shè)計(jì)的要求。 2、系統(tǒng)設(shè)計(jì)
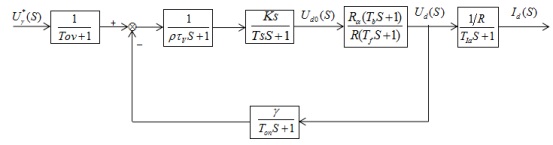
1.電壓調(diào)節(jié)器設(shè)計(jì)電壓調(diào)節(jié)器的作用: 將生產(chǎn)過(guò)程參數(shù)的測(cè)量值與給定值進(jìn)行比較,得出偏差后根據(jù)一定的調(diào)節(jié)規(guī)律產(chǎn)生輸出信號(hào)推動(dòng)執(zhí)行器消除偏差量,使該參數(shù)保持在給定值附近或按預(yù)定規(guī)律變化的控制器。 (1)選擇電壓調(diào)節(jié)器結(jié)構(gòu)圖 1 電壓調(diào)節(jié)器結(jié)構(gòu)
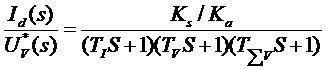
多閉環(huán)調(diào)速系統(tǒng)工程“最佳”設(shè)計(jì),是從內(nèi)環(huán)到外環(huán)逐環(huán)進(jìn)行處理與設(shè)計(jì)的。電壓內(nèi)環(huán)的三閉環(huán)調(diào)速系統(tǒng)應(yīng)首先從電壓內(nèi)環(huán)開(kāi)始設(shè)計(jì)。假設(shè)在電壓反饋回路中已用微分超前網(wǎng)絡(luò)抵消了濾波滯后作用的影響,即設(shè)計(jì)微分超前時(shí)間常數(shù)剛好等于濾波時(shí)間常數(shù)。這樣電壓反饋環(huán)節(jié)變成一個(gè)放大系數(shù)γ的比例環(huán)節(jié),并假設(shè)在電壓調(diào)節(jié)器給定輸入回路中設(shè)置濾波環(huán)節(jié),補(bǔ)償了動(dòng)態(tài)結(jié)構(gòu)圖中微分超前因子(  )。這兩種假定在工程上是常用的,也不難實(shí)現(xiàn)。 電壓內(nèi)環(huán)為一個(gè)小慣性和一個(gè)大慣性環(huán)節(jié)相串聯(lián)的雙慣性型系統(tǒng)。從工程“最佳”設(shè)計(jì)原理出發(fā),把電壓內(nèi)環(huán)校正設(shè)計(jì)為典型Ⅰ系統(tǒng),則應(yīng)選用比例積分(PI)調(diào)節(jié)器。 (2)計(jì)算電壓調(diào)節(jié)器參數(shù)電壓調(diào)節(jié)器工程“最佳”參數(shù)計(jì)算如下:  1.55?  180*  /1.25=0.144 S  =0.116 S 電壓反饋系數(shù)γ=0.037 積分時(shí)間常數(shù)  0.1178 因?yàn)?img id="aimg_eM7yt" onclick="zoom(this, this.src, 0, 0, 0)" class="zoom" width="264" height="24" src="http://c.51hei.com/a/huq/a/a/c/157/157.008.jpg" border="0" alt="" /> 故可得放大系數(shù)  =0.116*1.55/(2*0.0017*33*0.037*1.25)=35 這樣,AVR的傳遞函數(shù)為:  =35(0.016S+1)/0.116S  0.0017+0.002=0.0037 S 電壓內(nèi)環(huán)傳遞函數(shù)為: 2.電流調(diào)節(jié)器設(shè)計(jì)電流調(diào)節(jié)器作用: - 跟隨作用─作為內(nèi)環(huán)的調(diào)節(jié)器,在外環(huán)轉(zhuǎn)速的調(diào)節(jié)過(guò)程中,它的作用使電流緊緊跟隨其給定電壓(即外環(huán)調(diào)節(jié)器的輸出量)變化。
- 抗擾作用─對(duì)電網(wǎng)電壓的波動(dòng)起及時(shí)抗擾的作用。
- 加快動(dòng)態(tài)過(guò)程─在轉(zhuǎn)速動(dòng)態(tài)過(guò)程中,保證獲得電機(jī)允許的最大電流,從而加快動(dòng)態(tài)過(guò)程。
- 過(guò)流自動(dòng)保護(hù)作用─當(dāng)電機(jī)過(guò)載甚至堵轉(zhuǎn)時(shí),限制電樞電流的最大值,起快速的自動(dòng)保護(hù)作用。一旦故障消失,系統(tǒng)立即恢復(fù)正常。這個(gè)作用對(duì)系統(tǒng)的可靠運(yùn)行來(lái)說(shuō)是十分重要的。
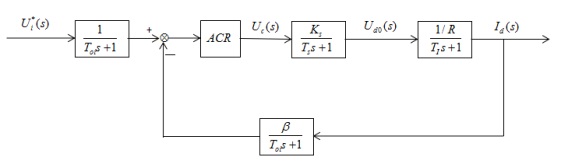
(1)選擇電流調(diào)節(jié)器結(jié)構(gòu)圖 2 電流調(diào)節(jié)器結(jié)構(gòu)
ACR的作用: - 使轉(zhuǎn)速n跟隨給定電壓
 變化,穩(wěn)態(tài)無(wú)靜差。 變化,穩(wěn)態(tài)無(wú)靜差。 - 對(duì)負(fù)載變化起抗擾作用。
- 其輸出限幅值
 由最大電流 由最大電流 決定, 決定,
(2)計(jì)算電流調(diào)節(jié)器參數(shù)電流調(diào)節(jié)器采用PI調(diào)節(jié)器,參數(shù)設(shè)置如下: 令  ,將調(diào)節(jié)器設(shè)計(jì)為典型Ⅰ系統(tǒng)  =1.65 小慣性環(huán)節(jié)近似處理 由于  和  一般都比  小的多,可以當(dāng)作小慣性群而近似地看作是一個(gè)慣性環(huán)節(jié),其時(shí)間常數(shù)為 轉(zhuǎn)速調(diào)節(jié)器的作用: - 速度調(diào)節(jié)─它使轉(zhuǎn)速n很快的跟隨給定電壓變化,穩(wěn)態(tài)時(shí)可減小轉(zhuǎn)速誤差,如果采用PI調(diào)節(jié)器,則可實(shí)現(xiàn)無(wú)靜差。
- 抗擾作用─對(duì)負(fù)載變化起抗擾作用。
- 限制電機(jī)最大電流─其輸出限幅值決定電機(jī)允許的最大電流。
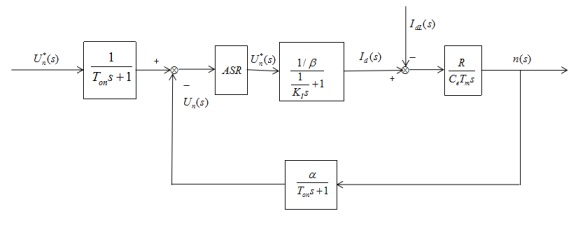
(1)選擇轉(zhuǎn)速調(diào)節(jié)器結(jié)構(gòu)圖 3 轉(zhuǎn)速調(diào)節(jié)器結(jié)構(gòu)
ACR的作用: - 對(duì)電網(wǎng)電壓波動(dòng)起及時(shí)抗擾作用。
- 起動(dòng)時(shí)保證獲得允許的最大電流
 。 。 - 在轉(zhuǎn)速調(diào)節(jié)過(guò)程中,使電流跟隨其給定電壓
 變化。 變化。
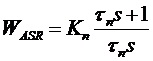
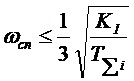
(2)計(jì)算轉(zhuǎn)速調(diào)節(jié)器參數(shù)轉(zhuǎn)速的超調(diào)與動(dòng)態(tài)降速均可由抗擾指標(biāo)衡量,而抗擾指標(biāo)以典型Ⅱ系統(tǒng)為佳,因此轉(zhuǎn)速調(diào)節(jié)器采用PI調(diào)節(jié)器,按典型Ⅱ系統(tǒng)設(shè)計(jì),取h= 轉(zhuǎn)速調(diào)節(jié)器為:  2*0.0037+0.02=0.0274  4*0.0274=0.1096  =16.65 式中,  ─轉(zhuǎn)速環(huán)開(kāi)環(huán)頻率特性特的截止頻率
第3章系統(tǒng)建模及仿真實(shí)驗(yàn)
1、MATLAB仿真軟件介紹Simulink是MATLAB軟件的擴(kuò)展,它是實(shí)現(xiàn)動(dòng)態(tài)系統(tǒng)建模和仿真的一個(gè)軟件包,它與MATLAB語(yǔ)言的主要區(qū)別在于,其與用戶交接口是基于Windows的模型化圖形輸入,其結(jié)果是使得用戶可以把更多精力投入到系統(tǒng)模型的構(gòu)建,而非語(yǔ)言的編程上。 Simulink可以處理的系統(tǒng)包括線性、非線性系統(tǒng);離散、連續(xù)及混合系統(tǒng);單任務(wù)、多任務(wù)離散事件系統(tǒng)。它是MATLAB的進(jìn)一步擴(kuò)展,不但實(shí)現(xiàn)了可視化的動(dòng)態(tài)仿真,也實(shí)現(xiàn)了C、FORTRAN,甚至和硬件之間的相互數(shù)據(jù)傳輸,大大擴(kuò)展了它的功能。 在Simulink提供的圖形用戶界面(GUI)上,只要進(jìn)行鼠標(biāo)簡(jiǎn)單拖拉操作,就可構(gòu)造出復(fù)雜仿真模型。外表以方框圖形呈現(xiàn),且采用分層結(jié)構(gòu)。從建模角度講,這既適于自上而下的設(shè)計(jì)流程,又適于自下而上逆流程設(shè)計(jì)。從研究分析角度講,這種Simulink模型不僅能讓用戶知道具體環(huán)節(jié)的動(dòng)態(tài)細(xì)節(jié),而且能讓用戶清晰地了解各器件、各子系統(tǒng)、各系統(tǒng)間信息交換,掌握各部分之間的交互影響。 2、仿真建模及實(shí)驗(yàn)
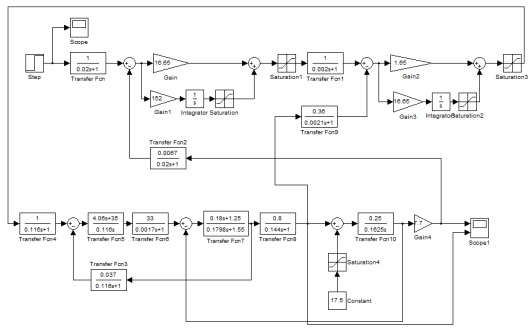
1.雙閉環(huán)仿真實(shí)驗(yàn)預(yù)置參數(shù) 選取轉(zhuǎn)速輸出限幅值為 Lower limit=0 Upper limit=10 - 基于數(shù)學(xué)模型的雙閉環(huán)直流調(diào)速控制系統(tǒng)仿真
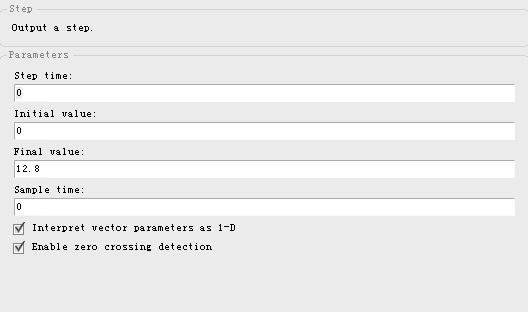
圖 4 雙閉環(huán)直流調(diào)速系統(tǒng)的仿真模型 圖 5 輸入模塊STEP的相關(guān)參數(shù) 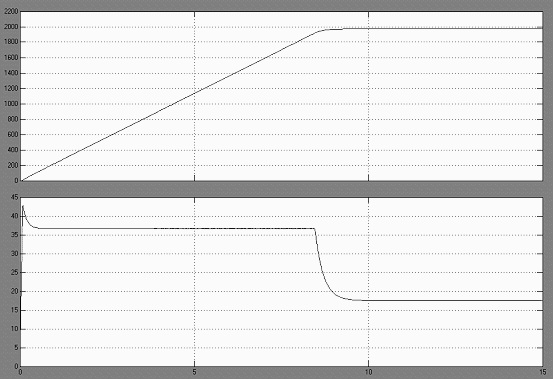
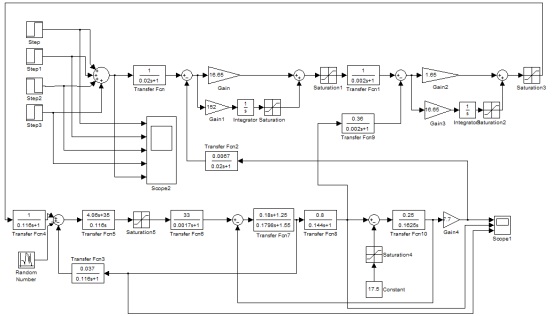
圖 6雙閉環(huán)直流調(diào)速系統(tǒng)啟動(dòng)過(guò)程的轉(zhuǎn)速和電流波形(從上到下依次是轉(zhuǎn)速和電流)三閉環(huán)直流調(diào)速系統(tǒng)是在雙閉環(huán)直流調(diào)速系統(tǒng)的基礎(chǔ)上,于電流環(huán)后增加了一個(gè)電壓內(nèi)環(huán),這樣系統(tǒng)可獲得良好的動(dòng)靜態(tài)性能及快速性,同時(shí)保證電流波動(dòng)限制在一定范圍內(nèi)。 仿真模型及其相應(yīng)參數(shù)設(shè)置如下圖所示 : 圖 7 電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)的仿真模型 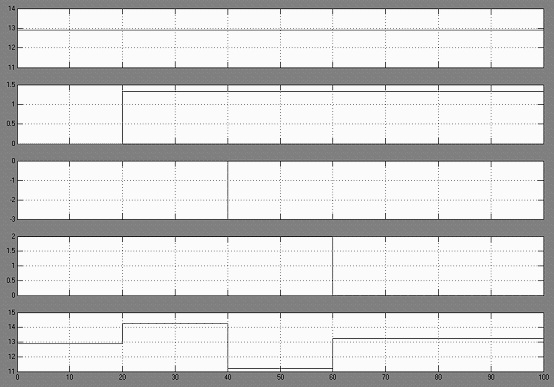 圖 8 電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)輸入波形圖 圖 8 電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)輸入波形圖如上圖所示,前四個(gè)波形是四個(gè)輸入波各自的波形,依次滯后0s、20s、40s、60s,第五個(gè)是前四個(gè)波形合成后的系統(tǒng)初始輸入波形。電壓作如下變化: Un→0.95 Un→Un →1.05Un 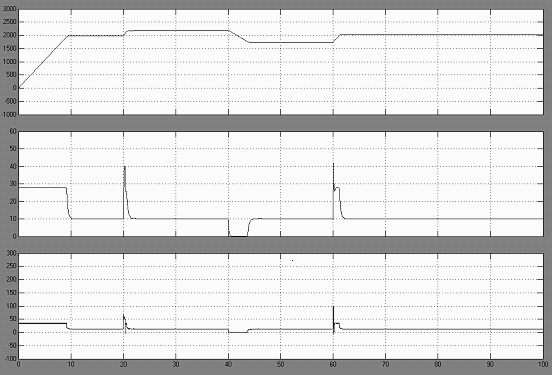 圖 9 電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)輸入有階段性變化時(shí)轉(zhuǎn)速、電流、電壓波形圖 圖 9 電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)輸入有階段性變化時(shí)轉(zhuǎn)速、電流、電壓波形圖從上至下依次為轉(zhuǎn)速、電流、電壓的波形 如上圖所示,輸入在第20s、40s、60s時(shí)刻發(fā)生變化 圖 10 電壓環(huán)加擾動(dòng)的三閉環(huán)直流調(diào)速控制系統(tǒng)仿真模型 從上至下依次為轉(zhuǎn)速、電流、電壓的波形 如上圖所示,輸入在第20s、40s、60s時(shí)刻發(fā)生變化 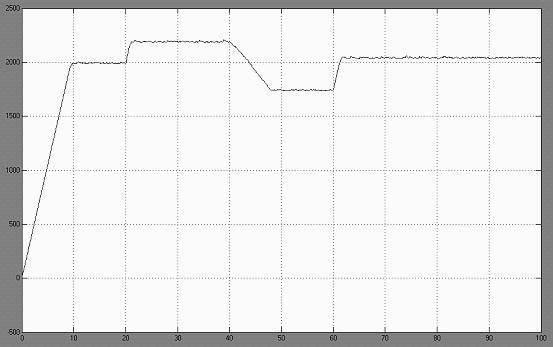
圖 11 電壓環(huán)加擾動(dòng)的三閉環(huán)直流調(diào)速控制系統(tǒng)仿真結(jié)果從左至右依次為Un→0.95 Un→Un →1.05Un變化時(shí)系統(tǒng)輸出變化 以上結(jié)果可以看出,加擾動(dòng)后,轉(zhuǎn)速輸出只是在很小的范圍發(fā)生波動(dòng),總體與未加擾動(dòng)時(shí)的波形相同。這樣,電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)對(duì)外界一定范圍的擾動(dòng)有一定的抗干擾能力。
第4章 結(jié)論與心得體會(huì)
1、結(jié)論通過(guò)上面的所有模擬過(guò)程,我們可以看出,本次帶電壓內(nèi)環(huán)的三環(huán)直流調(diào)速系統(tǒng)設(shè)計(jì)符合要求,我學(xué)會(huì)了MATLAB的使用,并且對(duì)于Simulink更加了解。MATLAB自身所帶的所有工具箱都適用于Simulink環(huán)境,我們可以直接用來(lái)處理涉及眾多領(lǐng)域的特殊問(wèn)題,這次課程設(shè)計(jì),增強(qiáng)了我們的實(shí)踐動(dòng)手能力,讓我們學(xué)會(huì)了怎樣運(yùn)用自己所學(xué)的各科專業(yè)知識(shí)來(lái)完成一個(gè)綜合性的課程設(shè)計(jì),使我們明白了組織知識(shí)的重要性。 這次課程設(shè)計(jì)的時(shí)間雖說(shuō)是短暫的,但在這幾天中我學(xué)會(huì)了不少的東西,如:MATLAB中Simulink模塊的使用、示波器的使用、畫(huà)圖工具的使用、尤其重要的是對(duì)直流調(diào)速系統(tǒng)的更進(jìn)一步了解與掌握。工具箱不僅僅是一些有用函數(shù)的集合,而且是世界頂級(jí)研究人員在各自領(lǐng)域做出的貢獻(xiàn),非常值得學(xué)習(xí)。隨著MATLAB版本的升級(jí),也在擴(kuò)大Simulink的適用范圍、使用效率,使Simulink進(jìn)入到更多的科學(xué)領(lǐng)域,成為計(jì)算機(jī)和工程系統(tǒng)分析中強(qiáng)有力的仿真工具。 2、心得體會(huì)本次課程設(shè)計(jì)分為兩個(gè)部分,一是老師給的練習(xí)題,而是我們要交報(bào)告的大作業(yè)。 老師給的練習(xí)題中,涉及到很多方面的知識(shí),并且給出了大量的例子,我們可以先對(duì)例子進(jìn)行學(xué)習(xí)與理解,再做后面的練習(xí)題,這樣有助于我們學(xué)習(xí)和鞏固知識(shí),我用了兩節(jié)課的時(shí)間做完了老師給的練習(xí)題,并且把答案積累到了一起,接下來(lái)我們就要在做完練習(xí)題的基礎(chǔ)上,做出老師給的課程設(shè)計(jì)的具體題目,我們可以自己選題,結(jié)合之前練習(xí)題的基礎(chǔ),做出自己的課程設(shè)計(jì)。 在本次課程設(shè)計(jì)中也遇到了不少的工程問(wèn)題和理論問(wèn)題,但在老師的指導(dǎo)和同學(xué)的幫助下,最后都得到了完滿的解決。在自己的不斷學(xué)習(xí)中,對(duì)于MATLAB軟件的應(yīng)用更加熟練了,并且學(xué)會(huì)結(jié)合把理論變成實(shí)際。對(duì)于課程設(shè)計(jì)的要求,也都基本得到了實(shí)現(xiàn)。
完整的Word格式文檔51黑下載地址:
| 












 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
