|
�˽̳�ᘌ�(du��)��݆ѭ�EС܇��ʹ�õ�оƬ��STM32F103C8T6 - ���bkeil5�����w�İ��b��ʽҊ(ji��n)�ļ��A ��keil5���b/�� ���ΰ��bKEIL5���������bоƬ����.pdf������Ҫ�õ��İ��b��(Keil_uVision_MDK522.EXE)
���b��Keil5֮����Ҫʹ�õ��ƽ��(Keilע��(c��)�C(j��)) ��Ҫ�U(ku��)չ�Ď�(k��)�ļ�(ARM.CMSIS.3.20.4.pack Keil.STM32F1xx_DFP.2.1.0.pack) ���ѽ�(j��ng)���ļ��A��(n��i)���پW(w��ng)���d��(k��)�ļ��\���� - ���b��KEIL5֮���_(k��i)ܛ��
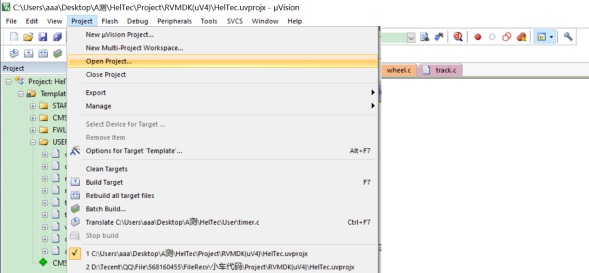
����(d��ng)���� �x��ˆΙ� Project �C> Open Project ���ҵ��@��(g��)�ļ��A���ҵ� ��HELT�� ���ļ��A�����D����ʾ·���ҵ���Y��.uvprojx ���ļ����_(k��i)���� - ���_(k��i)����֮��ֱ�� ���¾��g

�@ʾ�](m��i)���e(cu��)�` - �����B�� J-LINK ���d����USB���B����X����һ���B��С܇
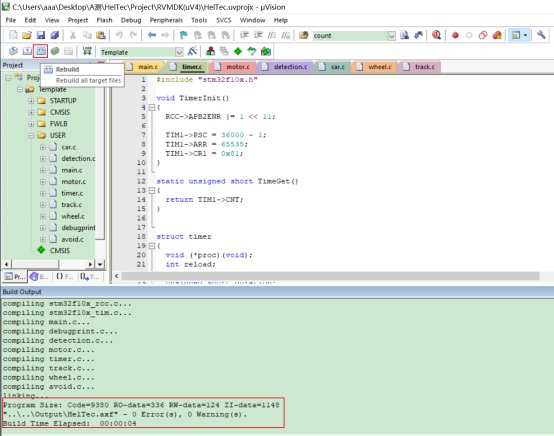
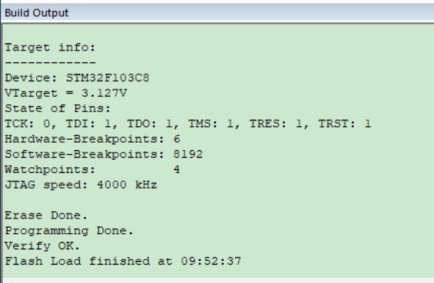
�ȴ��_(k��i)С܇�Դ����С܇����Ďׂ�(g��)�t�������ģ���������Keil5���c(di��n)�����d���o ����䛳���С܇оƬ�� ����䛳���С܇оƬ�� ��䛽Y(ji��)������D�t�C����䛳ɹ��� - �������d�����_(k��i)ʼ�{(di��o)��(ji��)С܇�t��Б�(y��ng)ģ�K���`����(��Ҫ����)��
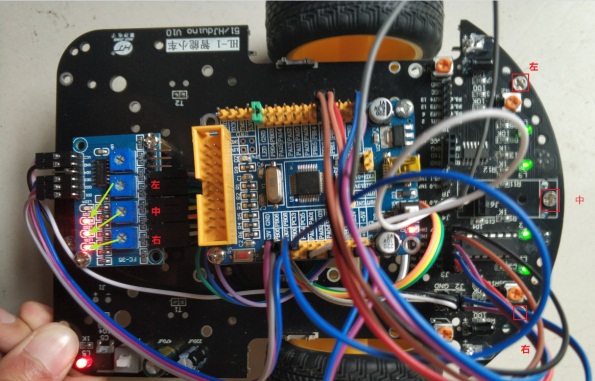
�{(di��o)��(ji��)֮ǰ������(x��)һ�¼t��Б�(y��ng)ѭ�Eԭ�����W(w��ng)���N�D����ѽ�������� ��(du��)���`���ȵ��{(di��o)��(ji��)����ѭ��ԭ�t�ǣ� ����Ҫ�{(di��o)��(ji��)�ļt��Б�(y��ng)ģ�Kˮƽ��(du��)��(zh��n)һ�l�ھ����{(di��o)��(ji��)�t��Б�(y��ng)ģ�K��(du��)��(y��ng)���λ����ʹ���������{(di��o)��(ji��)�ļt��ģ�K��ָʾ������׃��r(sh��)ֹͣ�{(di��o)��(ji��)��
��?y��n)�������(g��)�t��Б�(y��ng)ģ�K�����ԣ����ΰ�����Ҫ�{(di��o)��(ji��)���ǂ�(g��)�t��Б�(y��ng)ģ�K��(du��)��(zh��n)�ھ�������ɂ�(g��)��Ҫ��(du��)��(zh��n)�ھ�������(f��)�{(di��o)��(ji��)��ʹ�Ì�(du��)��(zh��n)�ھ���ģ�K���������ɂ�(g��)�](m��i)�Йz�y(c��)���ھ��ļt��ģ�K�ğ������t�C���{(di��o)��(ji��)��ɹ��� ���y(c��)ԇ�ĭh(hu��n)���x�������Ĉ�(ch��ng)�����ھ������ó������I��늹��z�����ɣ� �D �{(di��o)��(ji��)�`���� - �{(di��o)��(ji��)�ꮅ��������܉�����M(j��n)�Мy(c��)ԇ��ע�����N܉���r(sh��)��Ҫ�����D(zhu��n)��߀Ҫ�����D(zhu��n)��������Ҫ��T��·�ڣ��@��(sh��)�(y��n)Ҫ����Ĺ��������
- ����������һ��(g��)��(w��n)�}����T��·�ڲ������D(zhu��n)��܇�ܿ��ܕ�(hu��)ͣ��(l��i)��
���һ�£���?y��n)��ۂ���С܇ѭ�Eԭ�t�ǣ������߅�ļt��Б�(y��ng)���кھ���������߅�����g�ļt��ģ�Kͬ�r(sh��)�Б�(y��ng)���ھ�����ô�Ǿ͕�(hu��)�������D(zhu��n)�����C܉���M��̎�����g��������ֹ݆ͣ����݆ǰ�D(zhu��n)��ͬ�����������߅�ļt��ģ�K�Б�(y��ng)���ھ�������߅�����g�ļt��Б�(y��ng)ģ�Kͬ�r(sh��)�Б�(y��ng)���ھ����tС܇�������D(zhu��n)������ֹ݆ͣ����݆ǰ�D(zhu��n)�������ֻ�����g�ļt��Б�(y��ng)ģ�K�Б�(y��ng)���ھ�����ôС܇ֱ�ߣ����ɂ�(g��)݆�Ӷ�ǰ�D(zhu��n)������(d��ng)����(g��)�t��ģ�K���](m��i)�Йz�y(c��)���ھ����tС܇�D(zhu��n)Ȧ�����ͬ�r(sh��)����(g��)�z�y(c��)���ھ����tС܇ֹͣ���@��(g��)�l���Ǟ���ģ�M�K�c(di��n)ȫ��һ����ډK���O(sh��)Ӌ(j��)�ģ�������T��·�ڿ��ܳ��F(xi��n)�`�С� ᘌ�(du��)�ˆ�(w��n)�}���҂����r(sh��)�뵽�Ľ�Q�k���ǣ��уɂ�(c��)�ļt��Б�(y��ng)ģ�K����߅�Ƅ�(d��ng)�����g�ı��ֲ���(d��ng)��ʹ������(g��)�Б�(y��ng)ģ�K����ͬһ�lˮƽ���ϕr(sh��)���ɱ����`�еĿ��ܣ��@��(g��)���Ó�(d��n)���ڽK�c(di��n)����(g��)�t��ģ�K����ͬ�r(sh��)�z�y(c��)���o�ھ�����r����?y��n)�K�c(di��n)�O(sh��)Ӌ(j��)�кܴ�һ�K�ډK��������ȫ��(hu��)ʹ����(g��)�t��ģ�Kͬ�r(sh��)�z�y(c��)���ھ���ʹ��С܇ֹͣ�� ͬ�W(xu��)��Ҳ��������������ԭ���(l��i)�(y��n)�CС܇���D(zhu��n)���Ƿ����_��һ��(g��)�t��ģ�K��(du��)��(zh��n)�ھ����^��݆���D(zhu��n)���Ƿ����_��������D(zhu��n)�����ԇLԇ��(du��)�{(di��o)늙C(j��)����ؓ(f��)�O���t���������D(zhu��n)��
��Ƭ�C(j��)Դ��������: - #include "stm32f10x.h"
- struct motor
- {
- enum {STOP, FORWARD, BACKWARD} state;
- int forward_opcode;
- int backward_opcode;
- };
- static struct motor left_motor, right_motor;
- void MotorInit()
- {
- RCC->APB2ENR |= 1 << 3;
- GPIOB->CRH &= 0xff0000ff;
- GPIOB->CRH |= 0x00333300; //PB10 ����� , PB11 ��ǰ�M(j��n), PB12 ��ǰ�M(j��n), PB13 �Һ���
- GPIOB->BSRR = ((1 << 10) | (1 << 11) | (1 << 12) | (1 << 13)) << 16;
-
- left_motor.state = STOP;
- left_motor.forward_opcode = 1 << 11;
- left_motor.backward_opcode = 1 << 10;
- right_motor.state = STOP;
- right_motor.forward_opcode = 1 << 12;
- right_motor.backward_opcode = 1 << 13;
- }
- //��(du��)ij늙C(j��)ʩ��ǰ�D(zhu��n)�(q��)��(d��ng)�ƽ
- static void MotorRotateForward(struct motor *pmotor)
- {
- if (pmotor->state != FORWARD)
- {
- GPIOB->BSRR = (pmotor->backward_opcode << 16) | pmotor->forward_opcode;
- pmotor->state = FORWARD;
- }
- }
- //��(du��)ij늙C(j��)ʩ�Ӻ��D(zhu��n)�(q��)��(d��ng)�ƽ
- static void MotorRotateBackward(struct motor *pmotor)
- {
- if(pmotor->state != BACKWARD)
- {
- GPIOB->BSRR = (pmotor->forward_opcode << 16) | pmotor->backward_opcode;
- pmotor->state = BACKWARD;
- }
- }
- //��(du��)ij늙C(j��)ֹͣ�(q��)��(d��ng)�ƽ
- static void MotorStop(struct motor *pmotor)
- {
- if (pmotor->state != STOP)
- {
- GPIOB->BSRR = (pmotor->forward_opcode | pmotor->backward_opcode) << 16;
- pmotor->state = STOP;
- }
- }
- //늙C(j��)���ƺ���(sh��)
- //ݔ��?y��n)��?sh��)��늙C(j��)��(bi��o)�R(sh��)�ַ�'r'��l'���һ��� �������a�ַ�'f'��'b'��'s'�����D(zhu��n)�����D(zhu��n)���oֹ��
- void MotorControl(char motor, char op_cmd)
- {
- struct motor *pmotor;
-
- if (motor == 'r')
- pmotor = &right_motor;
- else if (motor == 'l')
- pmotor = &left_motor;
- else
- return;
- if (op_cmd == 'f')
- MotorRotateForward(pmotor);
- if (op_cmd == 'b')
- MotorRotateBackward(pmotor);
- if (op_cmd == 's')
- MotorStop(pmotor);
- }
�����Y��51hei�ṩ���d:
 ��݆ѭ�EС܇.7z
(6.25 MB, ���d��(sh��): 215)
��݆ѭ�EС܇.7z
(6.25 MB, ���d��(sh��): 215)
2019-11-15 13:14 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664










 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��