|
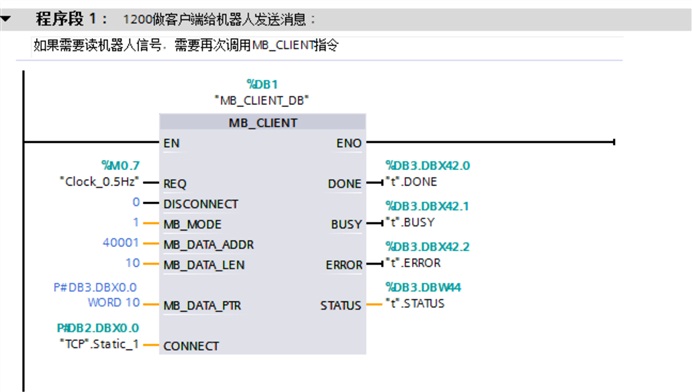
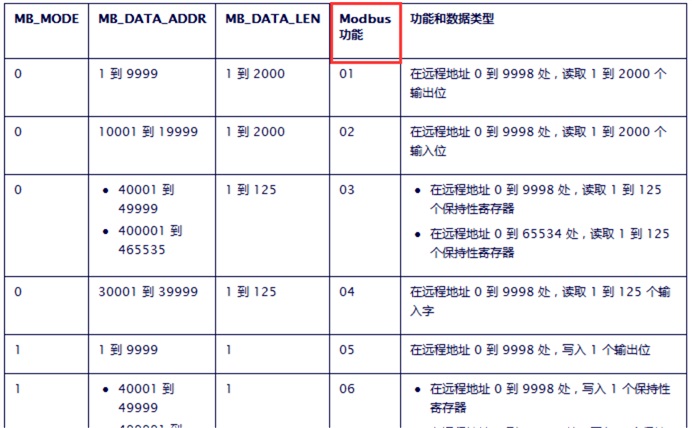
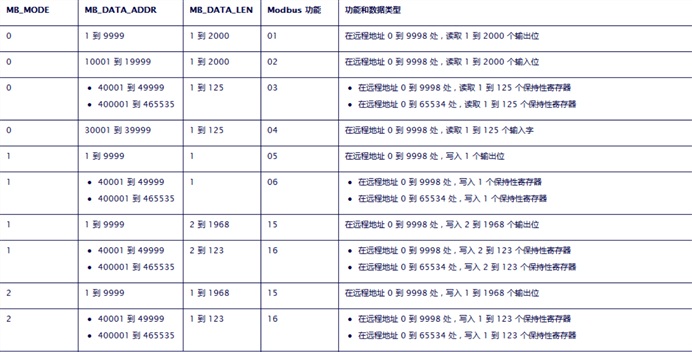
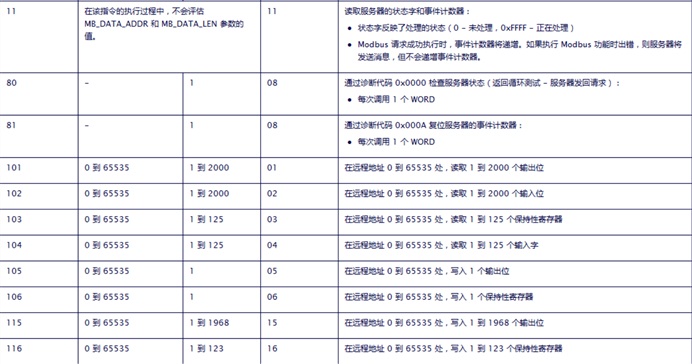
1.EFFORT機器人做服務器(即從站,在MODBUS-TCP中不存在從站的定義) 2.在1200PLC中使用的指令MB_CLIENT(客戶端); 3.1200指令配置講解: REQ:必須選用脈沖觸發; DISCONNECT: {此處填寫一個(值為false變量)或為0參數} MB_MODE:通訊請求模式(讀取/寫入或診斷)也可以填寫MODBUS 的功能代碼,如圖:只是提示功能代碼的位置; MODEBUS中MB_MODE表,如下圖: MB_DATA_ADDR: 取決于 MB_MODE,根據MB_MODE來填寫;(首先,根據MB_MODE表中的【操作和數據】,確定我們要采集的是什么數據,案例中的數據是給機器人寫入數值,如果想讀數據,還需再次添加MB_CLIENT指令,同時還要注意存儲 全部資料51hei下載地址:
 MODBUS-TCP-Robot.rar
(1.09 MB, 下載次數: 78)
MODBUS-TCP-Robot.rar
(1.09 MB, 下載次數: 78)
2020-3-31 19:32 上傳
點擊文件名下載附件
|