這個是超聲波測距的代碼,可以添加stm32程序中,并且有測距的組件就可以使用了。
還附加有原理講解圖文word

無標題.png (207.05 KB, 下載次數: 108)
下載附件
2020-5-7 17:06 上傳
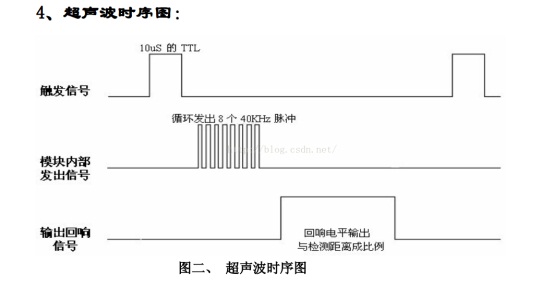
HC-SR04超聲波測距模塊可提供2cm-400cm的非接觸式距離感測功能,測距精度可達高到3mm;模塊包括超聲波發射器、接收器與控制電路。像智能小車的測距以及轉向,或是一些項目中,常常會用到。智能小車測距可以及時發現前方的障礙物,使智能小車可以及時轉向,避開障礙物。 HC-SR04基本工作原理: (1)采用IO口TRIG觸發測距,給最少10us的高電平信呈。 (2)模塊自動發送8個40khz的方波,自動檢測是否有信號返回; (3)有信號返回, 通過IO口ECHO輸出一個高電平, 高電平持續的時間就是超聲波從發射到返回的時間。 測試距離=(高電平時間*聲速(340M/S))/2。 程序編寫思路是:1、配置好使用到的GPIO以及定時器; 2、給模塊TRIG端口發送大于10us的高電平信號,當收、收到ECHO回響信號是,打開定時器開始定時; 3、當回響信號消失,關閉定時器; 4、通過定時器定時時間來確定距離。 先由觸發信號啟動HC-RS04測距模塊,也就是說,主機要先發送至少10us的高電平,觸發HC-RS04,模塊內部發出信號是傳感器自動回應的,我們不用去管它。輸出回響信號是我們需要關注的。信號輸出的高電平就是超聲波發出到重新返回接收所用的時間。用定時器,可以把這段時間記錄下來,算出距離,結果要除于2,因為總時間是發送和接收的時間總和。 
單片機源程序如下:
- #include "cs.h"
- #include "stm32f10x.h"
- #include "delay.h"
- #include "usart.h"
- /*記錄定時器溢出次數*/
- uint overcount=0;
- /*設置中斷優先級*/
- void NVIC_Config(void)
- {
- NVIC_InitTypeDef NVIC_InitStructer;
-
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
-
- NVIC_InitStructer.NVIC_IRQChannelPreemptionPriority=0;
- NVIC_InitStructer.NVIC_IRQChannelSubPriority=0;
- NVIC_InitStructer.NVIC_IRQChannel=TIM2_IRQn;
- NVIC_InitStructer.NVIC_IRQChannelCmd=ENABLE;
-
- NVIC_Init(&NVIC_InitStructer);
- }
- /*初始化模塊的GPIO以及初始化定時器TIM2*/
- void CH_SR04_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructer;
- TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructer;
-
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE);
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
-
- /*TRIG觸發信號*/
- GPIO_InitStructer.GPIO_Speed=GPIO_Speed_50MHz;
- GPIO_InitStructer.GPIO_Mode=GPIO_Mode_Out_PP;
- GPIO_InitStructer.GPIO_Pin=GPIO_Pin_8;
- GPIO_Init(GPIOB, &GPIO_InitStructer);
-
- /*ECOH回響信號*/
- GPIO_InitStructer.GPIO_Mode=GPIO_Mode_IN_FLOATING;
- GPIO_InitStructer.GPIO_Pin=GPIO_Pin_9;
- GPIO_Init(GPIOB, & GPIO_InitStructer);
-
- /*定時器TIM2初始化*/
- TIM_DeInit(TIM2);
- TIM_TimeBaseInitStructer.TIM_Period=999;//定時周期為1000
- TIM_TimeBaseInitStructer.TIM_Prescaler=71; //分頻系數72
- TIM_TimeBaseInitStructer.TIM_ClockDivision=TIM_CKD_DIV1;//不分頻
- TIM_TimeBaseInitStructer.TIM_CounterMode=TIM_CounterMode_Up;
- TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructer);
-
- TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//開啟更新中斷
- NVIC_Config();
- TIM_Cmd(TIM2,DISABLE);//關閉定時器使能
-
- }
- float Senor_Using(void)
- {
- float length=0,sum=0;
- u16 tim;
- uint i=0;
- /*測5次數據計算一次平均值*/
- while(i!=5)
- {
- PBout(8)=1; //拉高信號,作為觸發信號
- delay_us(20); //高電平信號超過10us
- PBout(8)=0;
- /*等待回響信號*/
- while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9)==RESET);
- TIM_Cmd(TIM2,ENABLE);//回響信號到來,開啟定時器計數
-
- i+=1; //每收到一次回響信號+1,收到5次就計算均值
- while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9)==SET);//回響信號消失
- TIM_Cmd(TIM2,DISABLE);//關閉定時器
-
- tim=TIM_GetCounter(TIM2);//獲取計TIM2數寄存器中的計數值,一邊計算回響信號時間
-
- length=(tim+overcount*1000)/58.0;//通過回響信號計算距離
-
- sum=length+sum;
- TIM2->CNT=0; //將TIM2計數寄存器的計數值清零
- overcount=0; //中斷溢出次數清零
- delay_ms(100);
- }
- length=sum/5;
- return length;//距離作為函數返回值
- }
- void TIM2_IRQHandler(void) //中斷,當回響信號很長是,計數值溢出后重復計數,用中斷來保存溢出次數
- {
- if(TIM_GetITStatus(TIM2,TIM_IT_Update)!=RESET)
- {
- TIM_ClearITPendingBit(TIM2,TIM_IT_Update);//清除中斷標志
- overcount++;
-
- }
- }
 超聲波測距.7z
(676.27 KB, 下載次數: 493)
超聲波測距.7z
(676.27 KB, 下載次數: 493)
2020-5-7 17:44 上傳
點擊文件名下載附件
下載積分: 黑幣 -5
| 



 [復制鏈接]
[復制鏈接]





 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩


