�S����ӿƌW(xu��)���g(sh��)�İl(f��)չ�����M(j��n)늙C(j��)�đ�(y��ng)��Խ��Խ�V�����Ͳ��M(j��n)늙C(j��)���x��p��늙C(j��)�r(sh��)Ҫ�����(q��)��(d��ng)IC�ĽǶȿ����M(j��n)늙C(j��)���Ͳ��M(j��n)늙C(j��)������늙C(j��)�Ͳ��M(j��n)늙C(j��)�Ľy(t��ng)�Q�����M(j��n)늙C(j��)�\(y��n)���ڶ�N��(ch��ng)�ϣ��ڬF(xi��n)�������I(l��ng)��ʹ�ÏV����������Ҫ���á����M(j��n)늙C(j��)��һ�N����}�_��̖(h��o)�D(zhu��n)�Q������(y��ng)��λ�ƻ�λ�Ƶ�늄�(d��ng)�C(j��)��ÿݔ��һ��(g��)�}�_��̖(h��o)���D(zhu��n)�Ӿ��D(zhu��n)��(d��ng)һ��(g��)�ǶȻ�ǰ�M(j��n)һ������ݔ���Ľ�λ�ƻ�λ���cݔ����}�_��(sh��)�����ȣ��D(zhu��n)���c�}�_�l�ʳ����ȡ�
�����O(sh��)Ӌ(j��)�У�Ҫ���O(sh��)Ӌ(j��)���ಽ�M(j��n)늙C(j��)Ӌ(j��)��C(j��)����ϵ�y(t��ng)Ӳ���·������Ӳ���·�Ɇ�Ƭ�C(j��)���ӿ��·���(q��)��(d��ng)�·���@ʾ�·���_�P(gu��n)�·�ȽM�ɡ��O(sh��)Ӌ(j��)�����ġ��p���ġ��������IJ��M(j��n)늙C(j��)���������O(sh��)Ӌ(j��)���O(sh��)Ӌ(j��)�������IJ��M(j��n)늙C(j��)��ͣ���ơ������D(zhu��n)���ơ������ټ��p�ٿ��Ƴ���?q��)��F(xi��n)���{(di��o)ԇ��ͨ�^�������_�ij���ʹ�÷���ܛ��PROTEUS�M(j��n)��ԓ����ϵ�y(t��ng)�ķ��档
Ӌ(j��)��C(j��)����ϵ�y(t��ng)����Ӳ����ܛ���Ϳ����㷨3��(g��)����,һ��(g��)�������O(sh��)Ӌ(j��)߀��Ҫ���]ϵ�y(t��ng)�Ŀ��ɔ_����,ʹϵ�y(t��ng)���L(zh��ng)����Ч���\(y��n)��[1]��Ӌ(j��)��C(j��)���Ƽ��g(sh��)��һ�T����Ӽ��g(sh��)���Ԅ�(d��ng)���Ƽ��g(sh��)��Ӌ(j��)��C(j��)��(y��ng)�ü��g(sh��)����A(ch��)����Ӌ(j��)��C(j��)���Ƽ��g(sh��)����ģ��C�Ͽɾ��̿��Ƽ��g(sh��)����Ƭ�C(j��)���g(sh��)��Ӌ(j��)��C(j��)�W(w��ng)�j(lu��)���g(sh��)��
1.1 �O(sh��)Ӌ(j��)����
���M(j��n)늙C(j��)��һ�N����}�_��̖(h��o)�M(j��n)�п���,������}�_��̖(h��o)�D(zhu��n)�Q������(y��ng)�Ľ�λ�ƻ�λ�ƵĿ����(q��)��(d��ng)�b�á����ڲ��M(j��n)늙C(j��)�����}�_��̖(h��o)���Ƶ�,����m�������锵(sh��)�ֿ���ϵ�y(t��ng)���ŷ�Ԫ�������M(j��n)늙C(j��)�ľ�Ȧ��ÿݔ��һ��(g��)�}�_,�D(zhu��n)�Ӿ����D(zhu��n)һ��(g��)�����,�����ٶȺͿ����}�_��(y��n)��ͬ��,ͨ�^��׃�}�_�l�ʵĸߵ;Ϳ����ںܴ���(n��i)�{(di��o)��(ji��)늙C(j��)���D(zhu��n)�١����ڲ��M(j��n)늙C(j��)���о��ȸߡ������`���λ��(zh��n)�_�������ɿ�,��ֱ�ӽ��ܽ��Q��(sh��)����̖(h��o)�����c(di��n),��ˏV���ؑ�(y��ng)����Ӌ(j��)���y(c��)ԇ�x���С�
�O(sh��)Ӌ(j��)һ��(g��)���چ�Ƭ�C(j��)AT89S52��Ӌ(j��)��C(j��)���M(j��n)늙C(j��)����ϵ�y(t��ng)��ʹ�Ô�(sh��)�ֿ������M(j��n)�в��M(j��n)늙C(j��)����ͣ���������D(zhu��n)�����Լ����M(j��n)늙C(j��)�ļ��١��p�ٿ��ƣ���Ҫ�������Ă�(g��)�����Ҫ��
�M��һ��(g��)ʹ�Æ�Ƭ�C(j��)AT89S52��������������ಽ�M(j��n)늙C(j��)����ϵ�y(t��ng)��
��K0-K2����ͨ늷�ʽ�x���I��K0������ģ�K1���p���ģ�K2���������ģ�K3��K4�քe�醢��(d��ng)�ͷ�����ƣ����D(zhu��n)�r(sh��)�tɫָʾ���������D(zhu��n)�r(sh��)�Sɫָʾ���������D(zhu��n)�r(sh��)�Gɫָʾ��������K5-K12���鲽��(sh��)�Ľo��ֵ����3λLED�@ʾʣ�������(sh��)��
����(j��)�O(sh��)Ӌ(j��)Ҫ���M(j��n)��Ӳ����·�D�O(sh��)Ӌ(j��)���x����m���������M(j��n)��Ӳ���·�D�O(sh��)Ӌ(j��)��
��������(sh��)�F(xi��n)����(y��ng)���ܡ�
�M(j��n)�г����{(di��o)ԇ��ģ�M����
�����·һ��ľ�����ʎ�·������һ��(g��)����Ŵ�����ע���ǷŴ������Ƿ��������ăɶ˽��뾧�����Ѓɂ�(g��)��ݷքe�ӵ�����ăɶˣ�ÿ��(g��)��ݵ���һ���ٽӵ��أ��@�ɂ�(g��)��ݴ�(li��n)������ֵ�͑�(y��ng)ԓ����ؓ(f��)�d��ݡ����w��ʎ������(ji��n)�Q������늚��������Ե�Ч��һ��(g��)��ݺ�һ��(g��)��貢(li��n)�ٴ�(li��n)һ��(g��)��ݵĶ��˾W(w��ng)�j(lu��)��늹��W(xu��)���@��(g��)�W(w��ng)�j(lu��)�Ѓɂ�(g��)�C���c(di��n)�����l�ʵĸߵͷ������^�͵��l���Ǵ�(li��n)�C���^�ߵ��l���Dz�(li��n)�C�����ھ��w������������ʹ�@�ɂ�(g��)�l�ʵľ��x�ஔ(d��ng)?sh��)Ľӽ������@��(g��)�Oխ���l�ʷ�����(n��i)�������Ч��һ��(g��)늸У�����ֻҪ����ăɶ˲�(li��n)�Ϻ��m��������͕�(hu��)�M�ɲ�(li��n)�C���·���@��(g��)��(li��n)�C���·�ӵ�һ��(g��)ؓ(f��)�����·�оͿ��Ԙ�(g��u)�����Ҳ���ʎ�·�����ھ����Ч��늸е��l�ʷ�����խ�����Լ�ʹ����Ԫ���ą���(sh��)׃���ܴ��@��(g��)��ʎ�����l��Ҳ����(hu��)�кܴ��׃����������һ��(g��)��Ҫ�ą���(sh��)���Ǿ���ؓ(f��)�d���ֵ���x���cؓ(f��)�d���ֵ��ȵIJ�(li��n)��ݣ��Ϳ��Եõ������(bi��o)�Q���C���l�ʡ���D 2?3��ʾ�� 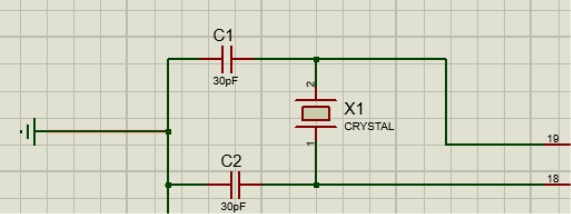
�D 2?3�����· 2.3 ��(f��)λ�·��(f��)λ�dž�Ƭ�C(j��)�ij�ʼ����������(f��)λ������̎����CPU�͆�Ƭ�C(j��)��(n��i)���������ܲ�����̎��һ���ij�ʼ��B(t��i)�������@��(g��)��B(t��i)�_ʼ���������˷�ֹ�����(zh��)���^����ʧ�����\(y��n)���Ɂy����̎�҂���������늏�(f��)λ���·�D���D 2?4��ʾ�� 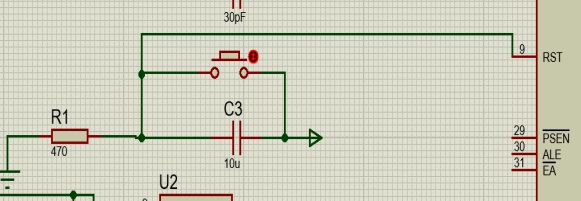
�D 2?4��(f��)λ�· ��Ƭ�C(j��)��Сϵ�y(t��ng)�dž�Ƭ�C(j��)�\(y��n)�е�������l�����Դ����Ƭ�C(j��)оƬ�������·����(f��)λ�·���Դ������(g��)ϵ�y(t��ng)���ܣ���Ƭ�C(j��)оƬ�\(y��n)�г���̎�픵(sh��)��(j��)�������·���Ƭ�C(j��)�����ṩ��(ji��)�ģ�����������Ƭ�C(j��)���K����(f��)λ�·���چ�Ƭ�C(j��)��늕r(sh��)��Ҫ��(f��)λʹ������^�_ʼ�\(y��n)�С� 2.4 ������ʽ�x��ģ�K��K0-K2����ͨ늷�ʽ�x���I��K0������ģ�K1���p���ģ�K2���������ģ�K3��K4�քe�醢��(d��ng)�ͷ�����ƣ����D 2?5��ʾ�� 
�D 2?5������ʽ�x��ģ�K�D 2.5 늄�(d��ng)�C(j��)���(q��)��(d��ng)���M(j��n)늙C(j��)ģ�K���D 2?6��ʾ 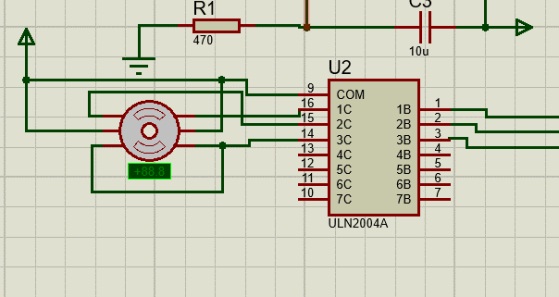
�D 2?6늄�(d��ng)�C(j��)ģ�K 2.5.1 ���M(j��n)늙C(j��)�����O(sh��)Ӌ(j��)���õ��Dz��M(j��n)늙C(j��)�����D 2?7��ʾ�� 
�D 2?7���M(j��n)늙C(j��)��(sh��)��D ���M(j��n)늙C(j��)�IJ�ͬ�(q��)��(d��ng)��ʽ�������ڹ����r(sh��)���}�_��̖(h��o)��һ�����݆���ӵ������@�M�ϣ��Ķ���(sh��)�F(xi��n)��ͬ�Ĺ�����B(t��i)������ͨ����ͬ�����\(y��n)�з�ʽ�������������ġ������p���ĺ������Ρ��p�������N��ע�⣺���桰���������ġ��еġ����ࡱָ�����������@�M�����ġ���ָ�����@�M��׃һ��ͨ늷�ʽ�������ġ���ʾͨ��������һ��(g��)ѭ�h(hu��n)���������p���ġ��еġ��p����ָͬ�r(sh��)�Ѓ����@�Mͨ늣��� 2.5.2 �(q��)��(d��ng)�·ULN2003A�·������(gu��)Texas+Instruments��˾��Sprague��˾�_�l(f��)�ĸ߉�������_(d��)���D���w������·��ULN2003�Ǹ��͉������������(n��i)�����߂�(g��)��NPN���_(d��)���D�ܽM�ɵ��(q��)��(d��ng)оƬ����D 2?8��ʾ����(j��ng)���������·��ʹ�ã����飺�@ʾ�(q��)��(d��ng)���^����(q��)��(d��ng)���������(q��)��(d��ng)��늴��y�(q��)��(d��ng)���ŷ�늙C(j��)�����M(j��n)늙C(j��)�(q��)��(d��ng)���·�С�ԓ�·�����c(di��n)���£�ULN2003��ÿһ��(du��)�_(d��)���D����(li��n)һ��(g��)2.7K�Ļ��O���,��5V�Ĺ���늉��������cTTL��CMOS�·ֱ�����B,����ֱ��̎��ԭ����Ҫ��(bi��o)��(zh��n)߉���_����̎���Ĕ�(sh��)��(j��)��ULN2003 �Ǹ߉�������_(d��)���D���w�����ϵ�Юa(ch��n)Ʒ,�����������ߡ�����늉��ߡ��ضȷ���������ؓ(f��)�d������(qi��ng)�����c(di��n),�m��(y��ng)�ڸ��Ҫ����ٴ����(q��)��(d��ng)��ϵ�y(t��ng)��ULN2003 ����늉��ߣ����������������_(d��)500mA���������P(gu��n)�B(t��i)�r(sh��)����50V ��늉���ݔ��߀�����ڸ�ؓ(f��)�d��������\(y��n)�С� 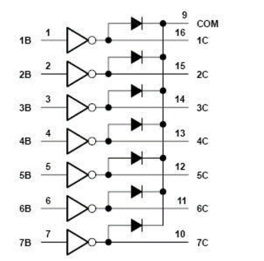
�D 2?8ULN2003߉�D 2.6 ��B(t��i)�@ʾģ�KLED�l(f��)����O���@ʾ���M(j��n)늙C(j��)�Ĺ�����B(t��i)�������քe�ӵ���Ƭ�C(j��)��P3.4~P3.6�����D 2?9��ʾ����Ƭ�C(j��)�B�ӵ�LEDꎘO��LED�(y��ng)�O��VCC���@��ͨ�^�O(sh��)�ö˿��ƽ����ʹLED���磬�_(d��)���@ʾЧ�������O(sh��)Ӌ(j��)�У��G������ֹͣ���t���������D(zhu��n)���S���������D(zhu��n)�� 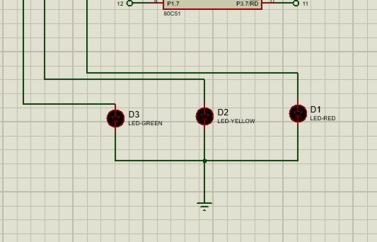
�D 2?9LED��B(t��i)�@ʾ 2.7 ��(sh��)�a���@ʾLED��(sh��)�a�܌�(sh��)�H�������߂�(g��)�l(f��)��ܽM��8���Θ�(g��u)�ɵģ�����С��(sh��)�c(di��n)����8��(g��)���@Щ�ηքe����ĸa,b,c,d,e,f,g,dp����ʾ����(d��ng)��(sh��)�a���ض��Ķμ���늉����@Щ�ض��Ķξ͕�(hu��)�l(f��)�������γ��҂��۾��������֘��ˡ�ͨ�^�֕r(sh��)݆�����Ƹ���(g��)LED��(sh��)�a�ܵ�COM�ˣ���ʹ����(g��)��(sh��)�a��݆���ܿ��@ʾ���@���DŽ�(d��ng)�B(t��i)�(q��)��(d��ng)�� ���n�}������λ��ꎘO��(sh��)�a�܁팦(du��)늙C(j��)����(sh��)���ٶȓ�λ�M(j��n)���@ʾ���·���£����چ�Ƭ�C(j��)P0�ڣ�P0�������������裬�Ԟ�P0�۲����������r(sh��)̎���_©��B(t��i)��ֻ���Sݔ�����ƽ�������������ݔ�����ƽ���·���D 2?10ʾ�� 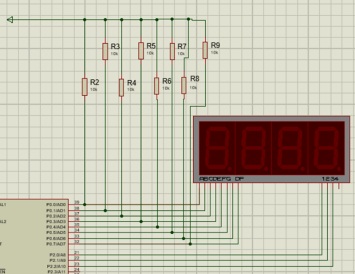
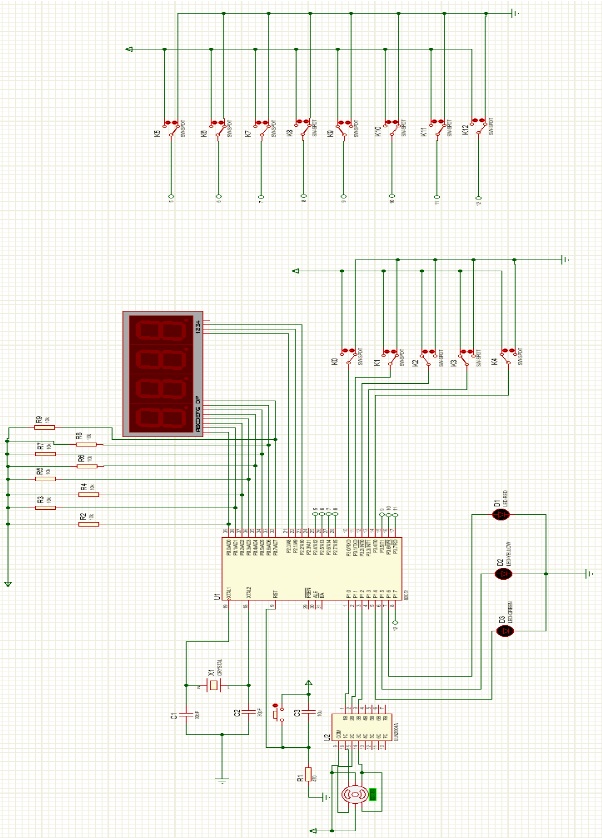
�D 2?10��(sh��)�a���· 2.8 ����С�Y(ji��)������Ҫ�nj�(du��)Ӳ���O(sh��)Ӌ(j��)�����������dzʬF(xi��n)����Ӳ��ϵ�y(t��ng)��D��AT89S52��Ƭ�C(j��)�Ľӿڼ����N���ԣ����M(j��n)�и������·���O(sh��)Ӌ(j��)��ԭ�������������·����(f��)λ�·��������ʽ�x��ģ�K���(q��)��(d��ng)�·��늙C(j��)������B(t��i)�@ʾ���֣���(sh��)�a���@ʾ���֡� ��3�� ܛ���O(sh��)Ӌ(j��)3.1 ���ܿ�D���M(j��n)늙C(j��)����ϵ�y(t��ng)���ܿ�D���D 3?1��ʾ���f����ÿ��(g��)ģ�K�c��Ƭ�C(j��)֮�g��(li��n)ϵ������߉��ͨ�^��Ƭ�C(j��)���ƒ��裬��(sh��)�a���@ʾ��LED�@ʾ�����M(j��n)늙C(j��)���Ƶȡ� 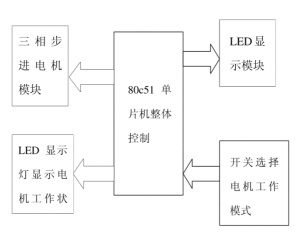
�D 3?1���ܿ�D 3.2 �����̈D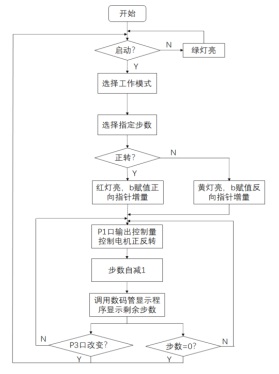
�D 3?2�����̈D �����M(j��n)�й�����ʽ�x����D�D 3?2��ʾ��������(d��ng)���o����Ƭ�C(j��)�Д��Ƿ�(d��ng)������]����(d��ng)�G����������(d��ng)���Ƭ�C(j��)��ԃ늙C(j��)�Ĺ���ģʽ��K0������ģ�K1���p���ģ�K2���������ġ��ٲ�ԃ늙C(j��)��ָ������(sh��)�������Д�늙C(j��)���D(zhu��n)߀�Ƿ��D(zhu��n)�����D(zhu��n)�t���������D(zhu��n)�r(sh��)�t�������ɴ˿������M(j��n)늙C(j��)����ָ���ķ�ʽ�\(y��n)�D(zhu��n)������ʣ�ಽ��(sh��)�@ʾ����(sh��)�a���ϣ���Ƭ�C(j��)�Дಽ��(sh��)�Ƿ����ꡣ
3.3 ���M(j��n)늙C(j��)ģ�K3.3.1 ���M(j��n)늙C(j��)������ʽ�f����1�����������Ĺ�����ʽ
��� 3?1�����@�N������ʽ��,A��B��C����݆��ͨ�,����ГQ����,�ň�(ch��ng)���D(zhu��n)һ��,�D(zhu��n)����ǰ�D(zhu��n)�^һ��(g��)�X��ǡ�����@�Nͨ늷�ʽ�������������Ĺ�����ʽ��A-B-C�����D(zhu��n)��C-B-A�鷴�D(zhu��n)���@�r(sh��)����Ǧ�b (��)��  (��ʽ1) (��ʽ1) ʽ��:m�������M(j��n)늙C(j��)�����Ĕ�(sh��); z �����D(zhu��n)���X��(sh��)

51hei.png (4.2 KB, ���d��(sh��): 71)
���d����
2020-11-16 16:18 �ς�
��2���p���Ĺ�����ʽ
��� 3?2�����@�N������ʽ�£�ÿ�ζ����Ѓ�����(d��o)ͨ,�����@�M̎����ͬ늉�֮��,��AB��BC��CA��AB (��֮)��ʽͨ�,�ʷQ���p���Ĺ�����ʽ�����@�N��ʽͨ�,�D(zhu��n)���X��̎��λ���ஔ(d��ng)�����Ŀ��Ʒ�ʽ��ȥ������ĺ������(g��)λ�á����IJ����Ӌ(j��)�㹫ʽ�c�����ĕr(sh��)�Ĺ�ʽ��ͬ��
�O�ֶȽ�/�X���= R + k��1/m
�M(j��n)һ������(ji��n)���X��(sh��)z:
 (��ʽ2) (��ʽ2)
ʽ��:m��������(sh��); q����ÿ��ĘO��(sh��); k������ (m - 1)��������(sh��);
R����������(sh��),��0��1��2��3������ �� 3?2 �����p���ĵ���λ����
51hei.png (12.46 KB, ���d��(sh��): 67)
���d����
2020-11-16 16:20 �ς�
��3���������Ĺ�����ʽ
��� 3?3�����@�N������ʽ��,�@�M��A��AB��B��BC��C��CA��A�r(sh��)��(�r(sh��)��)�D(zhu��n)�Q6��,�ň�(ch��ng)���D(zhu��n)һ��,�D(zhu��n)��ǰ�M(j��n)һ��(g��)�X��,ÿ���ГQ��ʹ�D(zhu��n)���D(zhu��n)��(d��ng)1. 5��,���@�Nͨ늷�ʽ�Q���������ع�����ʽ���䲽��Ǧ�b ��:
 (��ʽ3) (��ʽ3)ʽ��:m�������M(j��n)늙C(j��)�����Ĕ�(sh��); z �����D(zhu��n)���X��(sh��)
51hei.png (15.65 KB, ���d��(sh��): 77)
���d����
2020-11-16 16:19 �ς�
�P(gu��n)�Iģ�K�O(sh��)Ӌ(j��)3.4.1 ���ಽ�M(j��n)늙C(j��)ģ�K�O(sh��)Ӌ(j��)�O(sh��)Ӌ(j��)�f�����ڴ��O(sh��)Ӌ(j��)�У����õ������ಽ�M(j��n)늙C(j��)����(du��)�ڲ��M(j��n)늙C(j��)ģ�K�ij����O(sh��)Ӌ(j��)����ѭ�h(hu��n)�����O(sh��)Ӌ(j��)�������Ȱ������D(zhu��n)��Ŀ���ģ�ʹ���ڃ�(n��i)���Ԫ�У�Ȼ������һ�Ć�Ԫ��ȡ������ģ�K��ݔ�������Ȇ���(d��ng)���x���M(j��n)늙C(j��)���Ĕ�(sh��)��ݔ�벽��(sh��)��Ȼ���x�������D(zhu��n)�Ŀ���ģ���(q��)��(d��ng)���M(j��n)늙C(j��)�D(zhu��n)��(d��ng) ���ಽ�M(j��n)늙C(j��)�����̿�D����D 3?3��ʾ�� 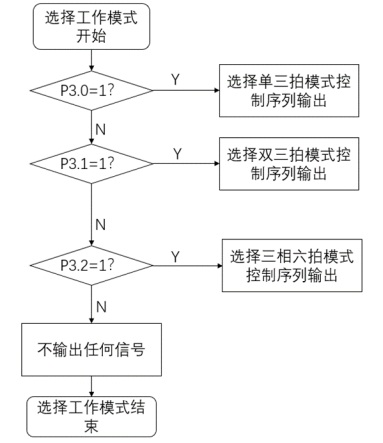
�D 3?3 ���ಽ�M(j��n)늙C(j��)�����̿�D 3.4.2 �@ʾģ�K�O(sh��)Ӌ(j��)�O(sh��)Ӌ(j��)�f�����@ʾģ�K����4λ�߶Δ�(sh��)�a�܁��@ʾ��������(sh��)���Ȍ��@ʾ�a���딵(sh��)�M�У�ָ������߅һλ��Ȼ��ȡ��Ҫ�@ʾ�Ĕ�(sh��)��(j��)��ָ��Q�a����ַ��ȡ���@ʾ�a����P0��ݔ���@ʾ�a��P2��ݔ��λ�x�a���@ʾ��4λ��������(sh��)������Ĕ�(sh��)�M��ַ������һλλ�x�a�^�m(x��)�@ʾ����D 3?4��ʾ�� 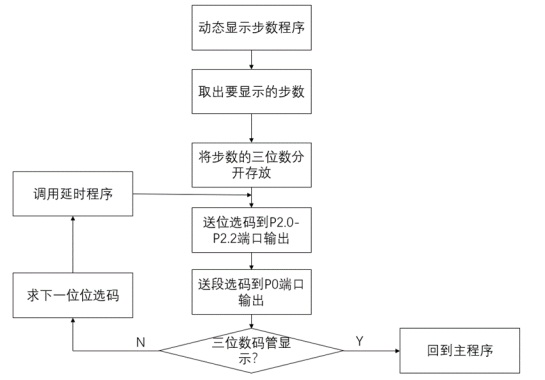
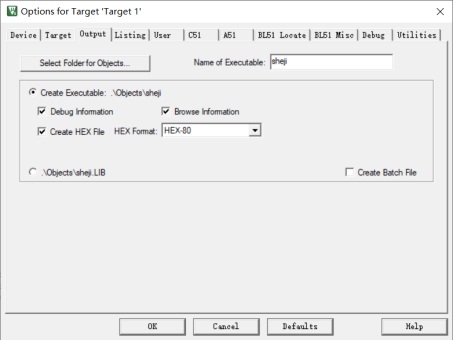
�D 3?4 ��(sh��)�a���@ʾԭ�� 3.5 ����С�Y(ji��)������Ҫ�����˲��M(j��n)늙C(j��)��(sh��)�F(xi��n)�^��ܛ�����O(sh��)Ӌ(j��)˼·���������ܿ�D�������̈D�����M(j��n)늙C(j��)ģ�K���P(gu��n)�ڹ�����ʽ���f������(sh��)�a���@ʾ�O(sh��)Ӌ(j��)�� ��4�� �y(c��)ԇ���(y��n)�C4.1 �΄�(w��)�ֹ������O(sh��)Ӌ(j��)�҂�С�M��4�ˣ�a��Ҫؓ(f��)؟(z��)�ˌ�(du��)��ϵ�y(t��ng)���Ƶ��·�O(sh��)Ӌ(j��)��bؓ(f��)؟(z��)��ϵ�y(t��ng)����ľ������{(di��o)ԇ����������P(gu��n)�Y�ϣ���(sh��)�F(xi��n)ϵ�y(t��ng)���ܣ�c��Ҫؓ(f��)؟(z��)��С�M�y(t��ng)�IҎ(gu��)�����ռ��Y�ϣ��·�����������x��Ҫؓ(f��)؟(z��)�˜y(c��)ԇ�(y��n)�C���ęn�����Ĺ�����ÿ��(g��)�˷ֹ�������������O(sh��)Ӌ(j��)�΄�(w��)�� 4.2 ��h(hu��n)��ʹ��KEIL uVision 4������Ƭ�C(j��)������Proteus�д����h(hu��n)�������Ɉ�(zh��)�г�����d�������Ƭ�C(j��)�У��M(j��n)�з��棬�(y��n)�C�O(sh��)Ӌ(j��)�����_�ԣ������ԡ� 4.2.1 ���������g�h(hu��n)��- ��(chu��ng)��AT89C51���̣��M(j��n)�о��������D 4?1��ʾ��
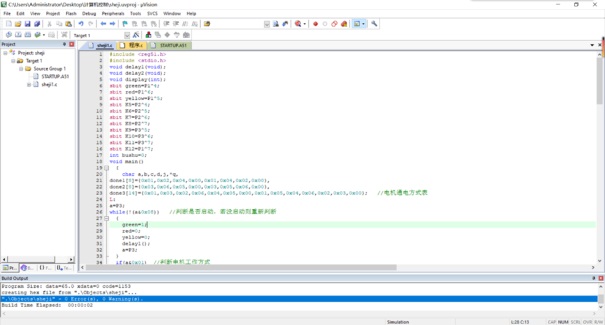
�D 4?1 ��(chu��ng)������ - �����a���x������.Hex�ļ��������D 4?2��ʾ��
�D 4?2 ����Ŀ��(bi��o)�ļ� 4.2.2 ��������͜y(c��)ԇ�h(hu��n)������(j��)�·ԭ��D��Proteus�д����ģ�͡��քe�ɔ�(sh��)�a���@ʾģ�K����(f��)λ�·������I�P�������·����Ƭ�C(j��)����оƬ�����M(j��n)늙C(j��)ģ�K��������B(t��i)�@ʾģ�K�����D 4?3��ʾ�� 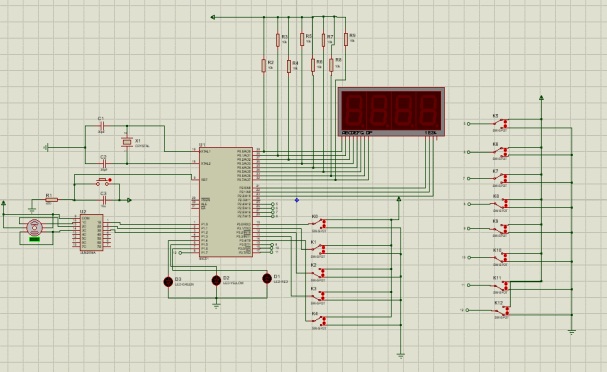
�D 4?3����ģ�� 4.3 �����(y��n)�Cͨ�^������(y��n)�C���M(j��n)늙C(j��)�Ŀ����Ƿ�������(y��n)�C���£� 4.3.1 ���N������ʽ�D 4?4�鲽�M(j��n)늙C(j��)���������������ģ��˕r(sh��)K0,K3�Ӹ��ƽ��K1,K2�ӵ��ƽ����(d��ng)�����D 4?6�鲽�M(j��n)늙C(j��)�������������ģ��˕r(sh��)K0,K1�ӵ��ƽ,K2,K3�Ӹ��ƽ����K4�Ӹ��ƽ�t���D(zhu��n)�����ƽ�t���D(zhu��n)���@���N������ʽ������ͬ�����������ĕr(sh��)��ͨ����?y��n)�A-B-C-A;�����p���ĕr(sh��)��ͨ����?y��n)�AB-BC-CA-AB;�������ĕr(sh��)��ͨ����?y��n)�A-AB-B-BC-C-CA-A;����ͨ늷�ʽ�����N������ʽ���D(zhu��n)����r����Ҫ���D(zhu��n)���tͨ늷�ʽ���^������ 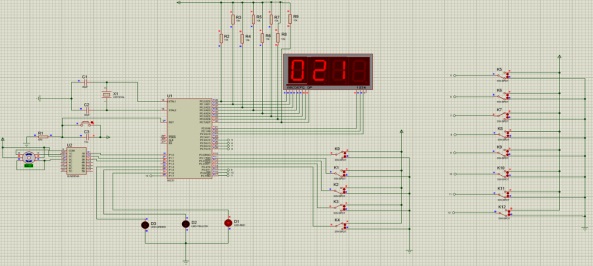
�D 4?4���������D(zhu��n) �D 4?5�D 4?6�鲽�M(j��n)늙C(j��)�����������p���ģ��˕r(sh��)K1,K3�Ӹ��ƽ,K0,K2�ӵ��ƽ 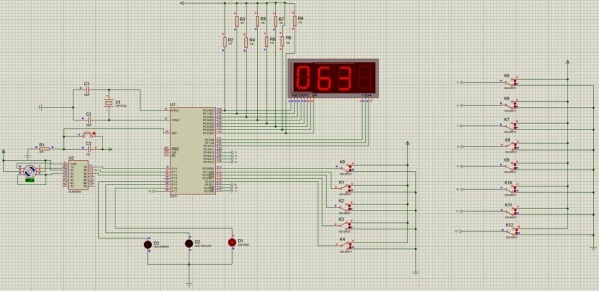
�D 4?5 �����p����
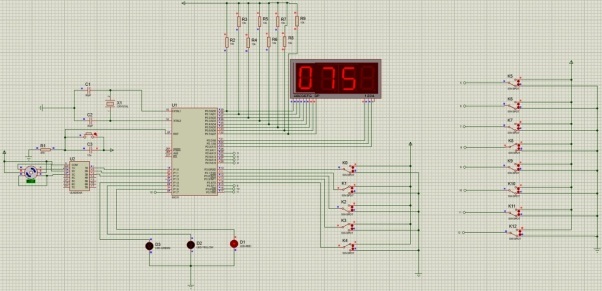
�D 4?6�����p���� �D 4?7�D 4?8�鲽�M(j��n)늙C(j��)�������������ģ��˕r(sh��)K0,K1�ӵ��ƽ,K2,K3�Ӹ��ƽ�� 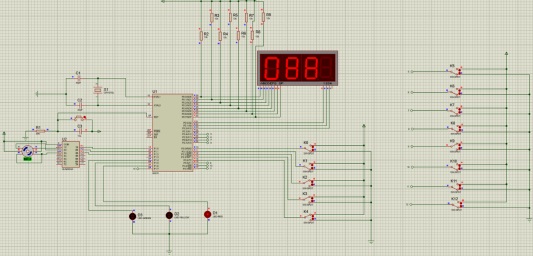
�D 4?7 �������� 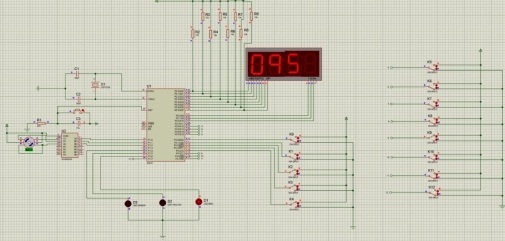
�D 4?8 �������� 4.3.2 ���D(zhu��n)�ͷ��D(zhu��n) �D 4?7�����ಽ�M(j��n)늙C(j��)���������D(zhu��n)��B(t��i)���˕r(sh��)K4�Ӹ��ƽ�� 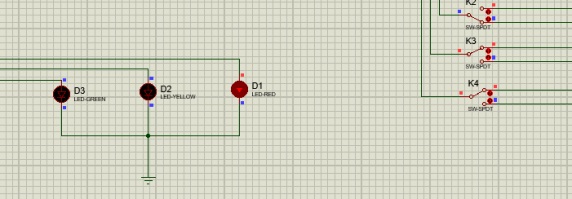
�D 4?9늙C(j��)���D(zhu��n) �D 4?8�����ಽ�M(j��n)늙C(j��)�����ڷ��D(zhu��n)��B(t��i)���˕r(sh��)K4���ƽ 
�D 4?10 늙C(j��)���D(zhu��n) 4.3.3 ָ������(sh��)�͔�(sh��)�a���@ʾ��(d��ng)����K5~K12���I�r(sh��)���քeָ������(sh��)ֵ��20��40��60��80��100��120��140��160����(d��ng)���M(j��n)늙C(j��)�\(y��n)�D(zhu��n)�r(sh��)��ÿ�\(y��n)�D(zhu��n)һ������?q��)������?sh��)�Ԝp1�����\(y��n)�Ô�(sh��)�a�ܺ͆�Ƭ�C(j��)�Ķ˿��B���@ʾʣ�ಽ��(sh��)����D 4?9��ʾ�� 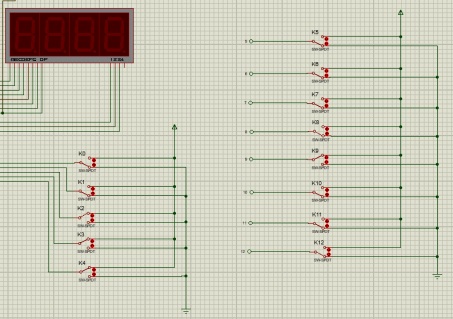
�D 4?11 ָ������(sh��)�͔�(sh��)�a���@ʾ
4.4 ���}�c�����ڱ����n�}�У�������һЩ���}���£� - ���ڌ�(du��)��Ƭ�C(j��)֪�R(sh��)���Ǻ���Ϥ�����O(sh��)Ӌ(j��)�^���г�����Ҫ����S�����P(gu��n)֪�R(sh��)������˼·����Ҫ����얹̺��\(y��n)��
- �ڌ�(du��)��(sh��)�a���M(j��n)���O(sh��)Ӌ(j��)�ĕr(sh��)����ӛ����������裬�����ڶ�η����\(y��n)�Еr(sh��)��(sh��)�a�ܶ����@ʾ
- ���M(j��n)�п��ƕr(sh��)���кܶ��r(sh��)���_�P(gu��n)���o��������(y��ng)�����ã��f������������`���Ҕ�(sh��)�a���@ʾ��ȫ����(du��)��(sh��)�a�ܵ��@ʾ�O(sh��)Ӌ(j��)���F(xi��n)���S������ϵ��e(cu��)�`��
- ���O(sh��)Ӌ(j��)�·���^���У��{(di��o)ԇ�����Լ����ƶ��o���_(d��)���A(y��)�ڵĠ�B(t��i)��ͨ�^Ո(q��ng)���ώ���ͬ�W(xu��)����(du��)�����ģ�һ��һ�����(y��n)�C�͜y(c��)ԇ���ώ�Ҳ�o�҂����O(sh��)Ӌ(j��)��������P(gu��n)���}��������
��(chu��ng)���c�U(ku��)չ�ڌ�(du��)���M(j��n)늙C(j��)�M(j��n)���O(sh��)Ӌ(j��)�ĕr(sh��)����ϵ�y(t��ng)�Ļ��A(ch��)�ϣ�߀���Գ�����ò��M(j��n)늙C(j��)�Ĺ��ܣ����Ϸ��Q������(du��)���M(j��n)늙C(j��)���ϕr(sh��)�M(j��n)�Ј�(b��o)�������Ԍ��@ʾ����(sh��)���_�P(gu��n)���ü����_�P(gu��n)�M(j��n)�п��ƣ��p�ٽӾ����@ʾʣ�ಽ��(sh��)���H����ʹ�Ô�(sh��)�a�ܣ�߀����ʹ��Һ���@ʾ����ʹ�Ñ��^�и��ѡ�ͬ�r(sh��)���M(j��n)늙C(j��)�����\(y��n)�õ������кܶ���(ch��ng)�ϣ��҂����Խ�(j��ng)�^AD�D(zhu��n)�Q����׃��B(t��i)
���һ �·�D
��Ƭ�C(j��)Դ��������: - #include <reg51.h>
- #include <stdio.h>
- void delay1(void);
- void delay2(void);
- void display(int);
- sbit green=P1^4;
- sbit red=P1^6;
- sbit yellow=P1^5;
- sbit K5=P2^4;
- sbit K6=P2^5;
- sbit K7=P2^6;
- sbit K8=P2^7;
- sbit K9=P3^5;
- sbit K10=P3^6;
- sbit K11=P3^7;
- sbit K12=P1^7;
- int bushu=0;
- void main()
- {
- char a,b,c,d,j,*q,
- done1[8]={0x01,0x02,0x04,0x00,0x01,0x04,0x02,0x00},
- done2[8]={0x03,0x06,0x05,0x00,0x03,0x05,0x06,0x00},
- done3[14]={0x01,0x03,0x02,0x06,0x04,0x05,0x00,0x01,0x05,0x04,0x06,0x02,0x03,0x00}; //늙C(j��)ͨ늷�ʽ��
- L:
- a=P3;
- while(!(a&0x08)) //�Д��Ƿ�(d��ng)�����]����(d��ng)�t�����Д�
- {
- green=1;
- red=0;
- yellow=0;
- delay1();
- a=P3;
- }
- if(a&0x01) //�Д�늙C(j��)������ʽ
- q=done1; //������
- else if(a&0x02)
- q=done2; //�p����
- else if(a&0x04)
- q=done3; //��������
- if(K5==1)
- {
- bushu=20; //�O(sh��)��bushu��ֵ���Կ��Ʋ���(sh��)
- }
- else if(K6==1)
- {
- bushu=40; //�O(sh��)��bushu��ֵ���Կ��Ʋ���(sh��)
- }
- else if(K7==1)
- {
- bushu=60; //�O(sh��)��bushu��ֵ���Կ��Ʋ���(sh��)
- }
- else if(K8==1)
- {
- bushu=80; //�O(sh��)��bushu��ֵ���Կ��Ʋ���(sh��)
- }
- else if(K9==1)
- {
- bushu=100; //�O(sh��)��bushu��ֵ���Կ��Ʋ���(sh��)
- }
- else if(K10==1)
- {
- bushu=120; //�O(sh��)��bushu��ֵ���Կ��Ʋ���(sh��)
- }
- else if(K11==1)
- {
- bushu=140; //�O(sh��)��bushu��ֵ���Կ��Ʋ���(sh��)
- }
- else if(K12==1)
- {
- bushu=160; //�O(sh��)��bushu��ֵ���Կ��Ʋ���(sh��)
- }
- if(a&0x10) //�Д�늙C(j��)�Ƿ����D(zhu��n)
- {
- green=0;
- red=1;
- yellow=0; //늙C(j��)���D(zhu��n)���t����
- b=0;
- }
- else
- {
- green=0;
- red=0;
- yellow=1; //늙C(j��)���D(zhu��n)���S����
- if(a&0x04) b=7; //���D(zhu��n)��b��λ��ͨ������
- else b=4;
- }
- d=b;
- while(1)
- {
- c=*(q+b);
- if(c==0) b=d; //����(sh��)���꣬b������λ
- else
- {
- P1=c; //��P3��ݔ��늙C(j��)������̖(h��o)
- b++;
- bushu--; //ʣ�ಽ��(sh��)
- display(bushu); //�@ʾ����(sh��)
- j=a;
- a=P3;
- if(a!=j&&bushu==0) //�Д�P3�ڠ�B(t��i)��̖(h��o)�Ƿ��׃
- if(!(a&0x08))
- bushu=0; //����ֹͣ��̖(h��o)��������(sh��)����
- goto L; //��B(t��i)��̖(h��o)��׃�����ص�L�������_ʼ�Д����
- }
- }
- }
- void display(int n) //����(sh��)�@ʾ����
- {
- unsigned char tab[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
- unsigned char i,k,t,num[3];
- num[0]=n%10;
- num[1]=(n/10)%10;
- num[2]=(n/100)%10;
- for(t=0;t<50;t++) //����50��
- {
- k=0x04; //λ�x�a�����λ
- for(i=0;i<3;i++)
- {
- P2=k; //P2��ݔ��λ�x�a
- P0=tab[num[i]]; //P0��ݔ���@ʾʣ�ಽ��(sh��)
- k=k>>1; //��һλλ�x�a
- delay2();
- }
- }
- }
- void delay1()
- {
- int i,j;
- for(i=0;i<200;i++)
- for(j=0;j<300;j++);
- }
- void delay2()
- {
- int i,j;
- for(i=0;i<10;i++)
- for(j=0;j<60;j++);
- }
�����Y��51hei�ṩ���d:
| 




 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664






 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��