|
�ڪqԥ�����w�C(j��)߀��С܇�ܾ��ԺK���x����һ���ƄәC(j��)���ˡ�ԭ���������c��1���w�C(j��)����̫��2���w�C(j��)�ՙC(j��)�o��DIY�����˘�Ȥ��3���������ޡ�4�����ҵČ��I(y��)�Y(ji��)�ϲ��o�ܡ�5��݆ʽ�(q��)�Ӻÿ��ơ� ���������S�����ɵĕr�g�����ԔD�D����˯�X�ĕr�g���˴�s3�ܻ������F(xi��n)�˙C(j��)���˵��Ƅӿ��ƣ�ҕ�l��ݔ�����Ժ�����ϙC(j��)е�ۣ����N������������п���߀��ŪŪҕ�X�R�e�� ֮�����f���ƄәC(j��)���ˣ�����鱾���Ķ�λ���^�ߣ��Ҳ�ϣ�������r�IJ�������һ��ԇ��͵�С܇����Ҫ���������õģ�һ����λ�ġ��X������ʲô���}��ÿ���µ��X�͉��I���ϵġ�ֻ�Ǻܶ��C(j��)е�Y(ji��)��(g��u)�]�Зl���Լ���������ֻ���ó�Ʒ���dȤ����õ��ώ��������^�̲��ڽY(ji��)���� �����B�ҵ�܇������������]���߀�кܶ��ĵط�����һ������Ҫ�Qһ�����L�ĵرP����6݆�(q��)�ӣ��Q��݆��
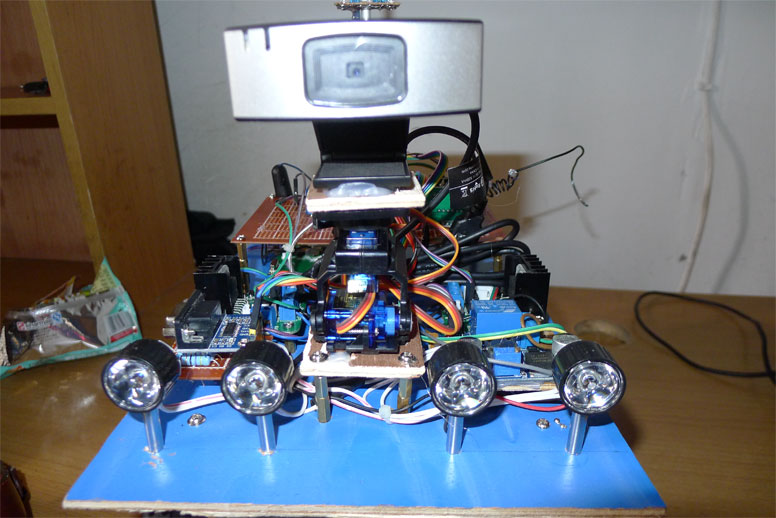
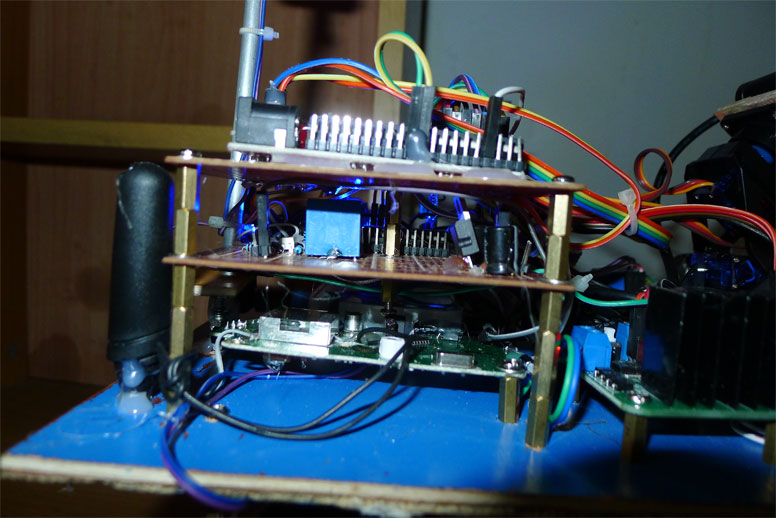
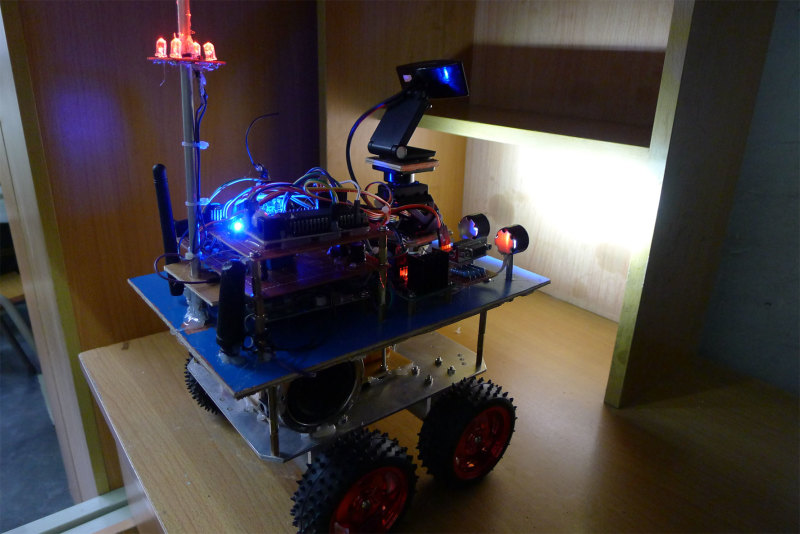
�����ǻ�����ɺ��С܇��

�����ҕ�l��ݔ?sh��)�С܇��ƽ����X������Կ���С܇�z���^�ĵ���ҕ�l��
�����Ǹ���������

1��TP-LINK ·���� ˢ�̼����Á��M(j��n)�ЈD���͔�(sh��)�����Ԍ��σr����150���ң��ѽ�(j��ng)ˢ���˹̼���

2��S606����z���^ USB���^���Ԍ��r��80����

3���b��2���ɶȶ�C(j��)���_�Ĕz���^
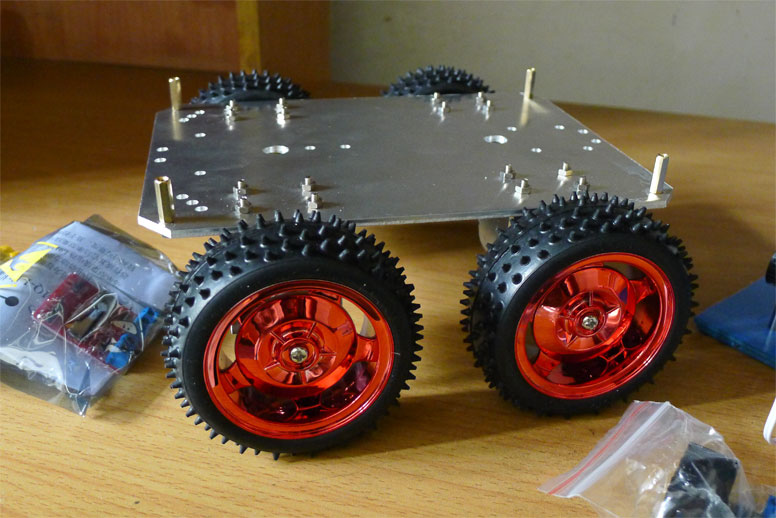
4���b�õ�С܇�ױP��85MM݆��37MM늙C(j��)��20X15CM�ױP��
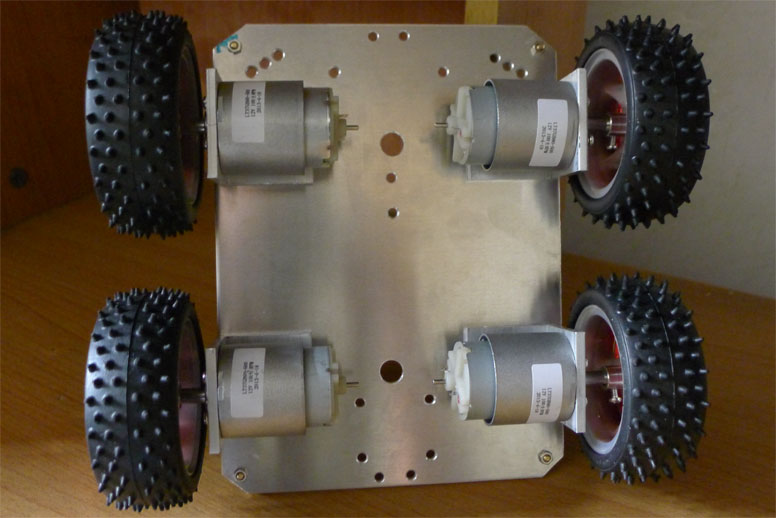
5��С܇�ױP��37����늙C(j��)������늙C(j��)24Ԫһ����݆12Ԫһ����

6��L298늙C(j��)�(q��)��ģ�K
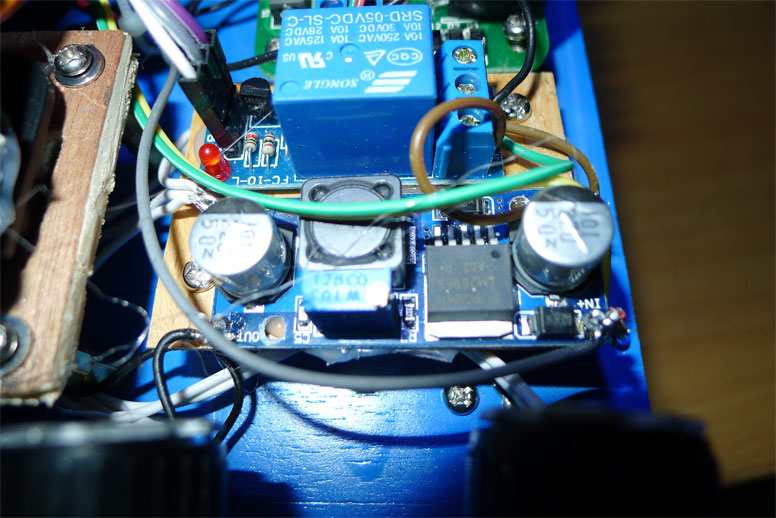
7�����b��늳غͱ��o(h��)�弰����·��
8���Ź�(ji��)18650���γɵ�늳ؽM��3��3����11.2V
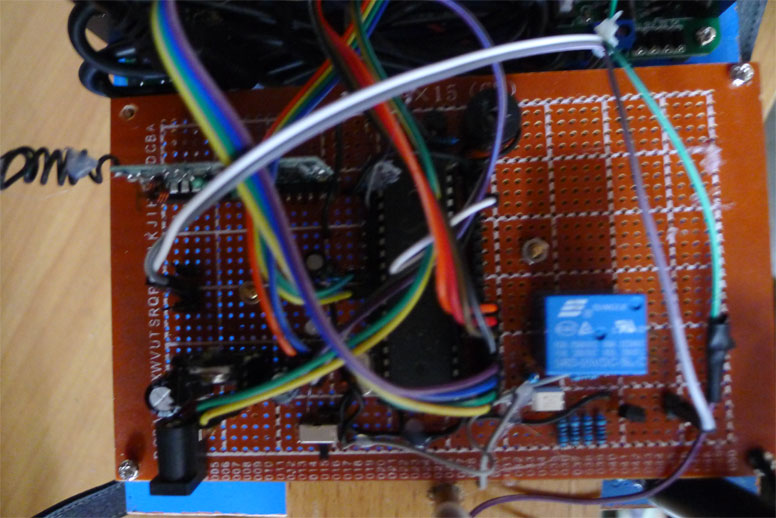
9�������·������STC89C52��Ƭ�C(j��)��
10���ϰ�ǰҕ�D�����Ă�LED���
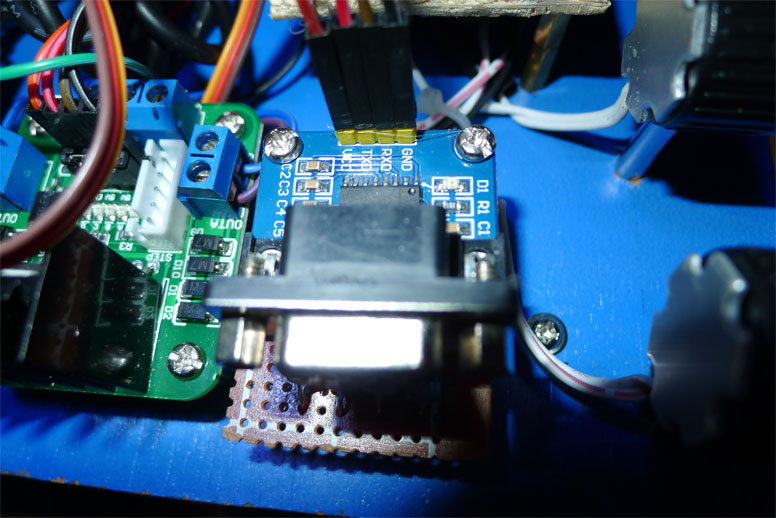
11��RS232�ƽ�D(zhu��n)�Qģ�K
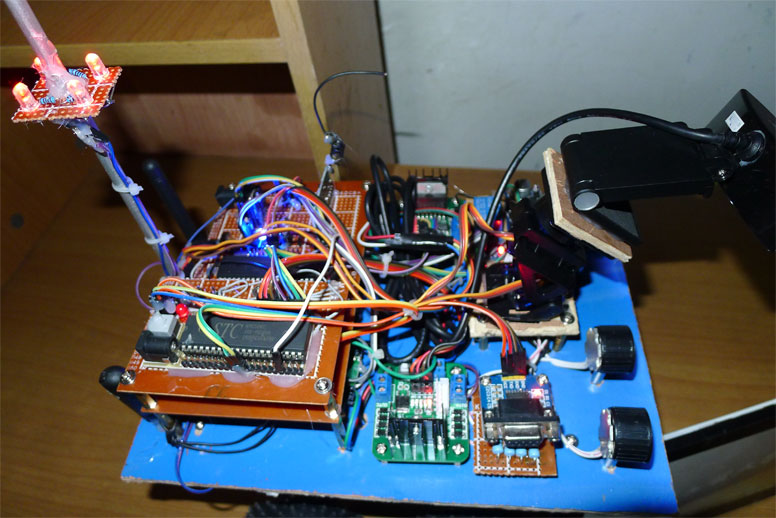
12�����C(j��)��ҕ�D
13���ϵװ����ӷeľ��(g��u)��
14���^�������������ģ�K��
15�����C(j��)�D
�����Bһ��С܇�Ļ���ԭ��
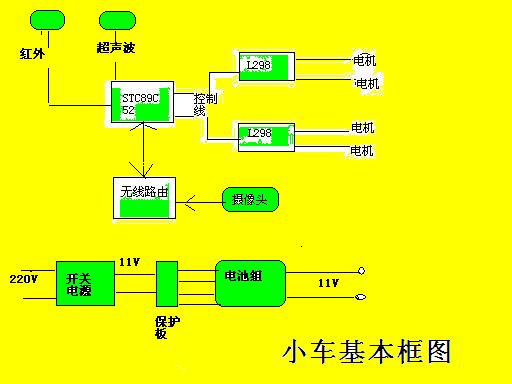
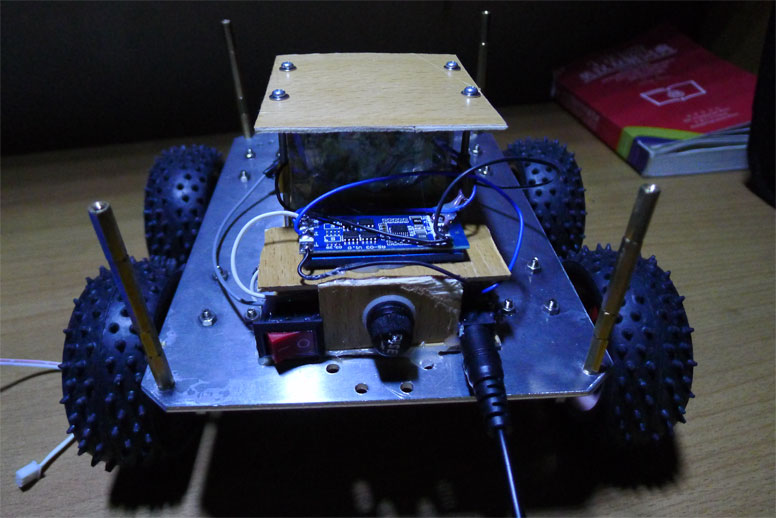
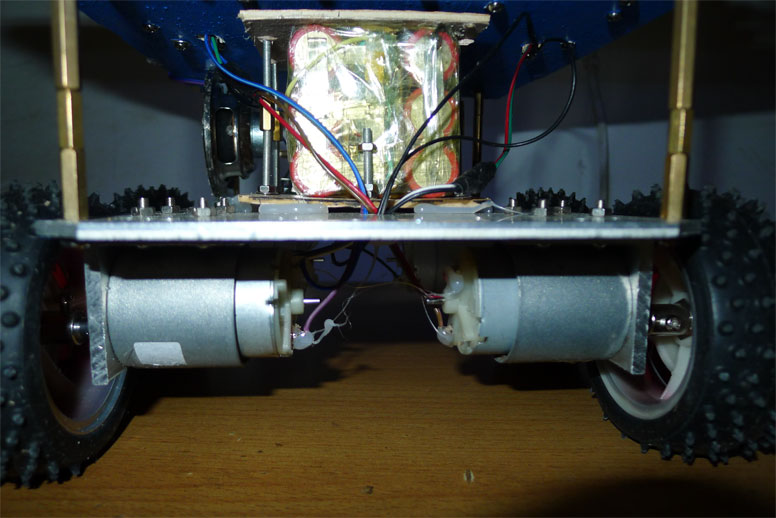
һ��С܇�ĈD���͔�(sh��)��ԭ���� ��С܇�����_Դ�ğo��·�����M(j��n)�ЈD���͔�(sh��)�����D����Ҫ�nj��z���^ҕ�lͨ�^·������ݔ?sh��)���λ�C(j��)�ϡ���(sh��)����Ҫ������λ�C(j��)ܛ���M(j��n)��С܇�Ŀ��ƣ������ߣ��D(zhu��n)���� �P(gu��n)��·�����Ĺ̼�ˢ�C(j��)�����վW(w��ng)ַ��http://www.wifi-robots.com/�� ����С܇����λ�C(j��)���Ʋ��֣� ����DIY��Ŀ�ģ�������51��Ƭ�C(j��)��L298늙C(j��)�(q��)�ӡ����w������STC89C52��Ƭ�C(j��)�����wCԴ�����ں���,��ͨ�^�yԇ�� ����С܇�ĵױP���֣� ����6061�X��37MM���ٜp��늙C(j��)��85MM݆��������݆�(q��)�ӡ� �ģ�С܇�Դ���֣� ����9��(ji��)18650�늡�ͨ�^���H�\(y��n)�Є�����(qi��ng)�ţ��m(x��)����(qi��ng)��늳ز���3X3�B�ӣ���11Vݔ�����Դ�����O(sh��)Ӌ�˳�늱��o(h��)���ݔ�����U�O(sh��)Ӌ�� �壬����·; �����Ă�����LED���^���ģ�K������ģ�K�� ��, �O(sh��)Ӌ�ˌ��v�C(j��)�· �ߣ�߀δ�O(sh��)Ӌ�t����ϣ������y���
��51��Ƭ�C(j��)Դ����: - #include<reg52.h>
- #include<math.h>
- #include<intrins.h>
- #define uchar unsigned char
- #define uint unsigned int
- uchar Buffer =0; //�Ĵ��ڽ��յĔ�(sh��)��(j��)
- uint URTAReceivedCount=0,n=1;
- uchar data Tempdatatable[5],CommandDatatable[5];//��(sh��)��(j��)��
- uchar serVal[2];
- uint pwm[]={1120,1190,1382,1382,1382,1382,1382,1382}; //��ʼ90��,�����H��1382.4��ȡ����1382��
- uchar pwm_flag=0;
- uint code ms0_5Con=461; //0.5msӋ��(sh��) �����H��460.8��ȡ����461��
- uint code ms2_5Con=2304; //2.5msӋ��(sh��)
-
-
- bit key_stime_ok;
- sbit StatusLight=P3^6; //��B(t��i)��
- sbit MainLight=P3^7; //�����
- sbit servo0=P0^0; //��C(j��)����
- sbit servo1=P0^1;
- sbit servo2=P0^2;
- sbit servo3=P0^3;
- sbit servo4=P0^4;
- sbit servo5=P0^5;
- sbit servo6=P0^6;
- sbit servo7=P0^7;
- /********************************************************************
- * ���Q : Delay_1ms()
- * ���� : �ӕr�ӳ����ӕr�r�g�� 1ms * x
- * ݔ�� : x (�ӕrһ����Ă���(sh��))
- * ݔ�� : �o
- ***********************************************************************/
- void Delay_1ms(uint i)//1ms�ӕr
- {
- uchar x,j;
- for(j=0;j<i;j++)
- for(x=0;x<=148;x++);
- }
-
- void TurnOnStatusLight()
- {
- StatusLight=0;
- }
- /********************************************************************
- * ���Q : Send_Data()
- * ���� : ����λ�C(j��)�����ַ�
- * ݔ�� : �o
- * ݔ�� : �o
- ***********************************************************************/
- void Send_Data(uchar type,uchar cmd,uchar dat)
- {
- uchar data Buffer[5];//��(g��u)����(sh��)��(j��)��
- uchar *p;
- uint Send_Count=0;
- p = Buffer;
- Buffer[0]=0XFF;
- Buffer[1]=type;
- Buffer[2]=cmd;
- Buffer[3]=dat;
- Buffer[4]=0XFF;
- while(1)
- {
- if(*p==0XFF)
- {
- Send_Count++; //0XFF��(bi��o)־�y(t��ng)Ӌλ
- }
- SBUF = *p; //�l(f��)��
- while(!TI) //����l(f��)���ꮅ��Ӳ������λTI���ȴ��l(f��)���ꮅ
- {
- _nop_();
- }
- p++;
- TI = 0;
- if(Send_Count == 2) //��(d��ng)�y(t��ng)Ӌ���ɴγ��F(xi��n)0XFF���t�J(r��n)��һ����(sh��)��(j��)���l(f��)���ꮅ������ѭ�h(hu��n)
- {
- TI = 0;
- break;
- }
- }
- }
- /********************************************************************
- �f(xi��)�hҎ(gu��)����
- ���^ ���λ ��(sh��)��(j��)λ ��(sh��)��(j��)λ �Y(ji��)��λ
- 0XFF 0X** OX** 0X** 0XFF
- �������f����
- ���λ ��(sh��)��(j��)λ ��(sh��)��(j��)λ ����
-
- 0X00 0X02 0X00 ǰ�M(j��n)
- 0X00 0X01 0X00 ����
- 0X00 0X03 0X00 ���D(zhu��n)
- 0X00 0X04 0X00 ���D(zhu��n)
- 0X00 0X00 0X00 ֹͣ
-
- 0X01 0X01 �Ƕ� ��C(j��)1
- 0X01 0X02 . ��C(j��)2
- 0X01 0X01 . ��C(j��)3
- 0X01 0X02 . ��C(j��)4
- 0X01 0X01 . ��C(j��)5
- 0X01 0X02 . ��C(j��)6
- 0X01 0X01 . ��C(j��)7
- 0X01 0X02 ��(sh��)��(j��) ��C(j��)8
-
- 0X02 0X01 ܇����
- 0X02 0X02 ܇����
-
- 0X03 ���_(d��)��(sh��)��(j��) �l(f��)�����_(d��)��(sh��)��(j��)
- ***********************************************************************/
- /********************************************************************
- * ���Q : Com_Int()
- * ���� : �����Д��Ӻ���(sh��)
- ***********************************************************************/
- void Com_Int(void) interrupt 4
- {
- uchar temp;
- ES=0; //�P(gu��n)������
- RI=0; //ܛ����������Д�
- temp=SBUF;
- if(temp==0XFF && URTAReceivedCount<3)
- {
- Tempdatatable[0]==0XFF; //���^
- URTAReceivedCount++;
- }
- else
- {
- Tempdatatable[n]=temp;
- n++;
- if(URTAReceivedCount==0&&n==2)
- n=1;
- }
-
- if(URTAReceivedCount==2)//��β
- {
- Tempdatatable[0]=0XFF;
- Tempdatatable[4]=0XFF;
- n=1;
- URTAReceivedCount=0; //�M���ꮅ
- temp="";
- // Send_Data(Tempdatatable[1],Tempdatatable[2],Tempdatatable[3]); //�l(f��)�ͽM�ɵĔ�(sh��)��(j��)����ȥ
- }
-
- CommandDatatable[0]=Tempdatatable[0];
- CommandDatatable[1]=Tempdatatable[1];
- CommandDatatable[2]=Tempdatatable[2];
- CommandDatatable[3]=Tempdatatable[3];
- CommandDatatable[4]=Tempdatatable[4];
-
- ES=1;//�_������
-
-
- }
-
- /********************************************************************
- * ���Q : Com_Init()
- * ���� : ���ڳ�ʼ��������11.0592,������9600��ʹ���˴����Д�
- ***********************************************************************/
- void Com_Init(void)
- {
- TMOD = 0x21;
- PCON = 0x00;
- SCON = 0x50;
- TH1 = 0xFd; //�O(sh��)���� 9600
- TL1 = 0xFd;
- TR1 = 1; //���Ӷ��r��1
- ES = 1; //�_������
- EA = 1; //�_����
- IT0=0;
- EX0=1;
- }
-
- /********************************************************************
- * ���Q :Moto_Forward()
- * ���� : 늙C(j��)1��2���ӣ�����ǰ�M(j��n)����܇���F(xi��n)��ǰ�M(j��n)��
- ***********************************************************************/
- void Moto_Forward()
- {
- P2= 0x55;
- Delay_1ms(100);
- }
- /********************************************************************
- * ���Q :Moto_Backward()
- * ���� : 늙C(j��)1��2���ӣ����Ǻ��ˣ���܇���F(xi��n)����ˡ�
- ***********************************************************************/
- void Moto_Backward()
- {
-
- P2= 0xaa;
- Delay_1ms(100);
- }
-
- /********************************************************************
- * ���Q :Moto_TurnLeft()
- * ���� : 늙C(j��)1���ˣ�늙C(j��)2ǰ�M(j��n)����܇���F(xi��n)�����D(zhu��n)��
- ***********************************************************************/
- void Moto_TurnLeft()
- {
- P2= 0x69;
- Delay_1ms(100);
- }
- /********************************************************************
- * ���Q :Moto_TurnRight()
- * ���� : 늙C(j��)1ǰ�M(j��n)��늙C(j��)2���ˣ���܇���F(xi��n)�����D(zhu��n)��
- ***********************************************************************/
- void Moto_TurnRight()
- {
- P2= 0x96;
- Delay_1ms(100);
- }
- /********************************************************************
- * ���Q :Moto_Stop()
- * ���� : 늙C(j��)1ֹͣ��늙C(j��)2ֹͣ����܇���F(xi��n)��ֹͣ��
- ***********************************************************************/
- void Moto_Stop()
- {
-
- P2= 0x00;
- Delay_1ms(100);
- }
- /********************************************************************
- * ���� : ��C(j��)PWM�Д��ʼ��
- ***********************************************************************/
- void Timer0Init()
- {
- /*0��=0.5ms, 45��=1ms, 90��=1.5ms, 135��=2ms, 180��=2.5ms
- /.5 ms��ʼֵ F700, (12n/11059200=2.5/1000, n=2304, X=65536-2304=63232 > F700)*/
- TMOD |= 0x01; //ʹ��ģʽ1��16λ���r����ʹ��"|"��̖������ʹ�ö������r���r����Ӱ�
- TH0=-ms2_5Con>>8; //�o����ֵ��17ms�Д�
- TL0=-ms2_5Con;
- EA=1; //������_
- ET0=1; //���r��0����_
- TR0=1; //���r��0�_�P(gu��n)���_
- }
- /********************************************************************
- * ���� : ��C(j��)PWM�Д�, //��C(j��)���ƺ���(sh��) ���ڞ�20ms һ��ѭ�h(hu��n)20MS = 8*2.5ms
- ***********************************************************************/
- void SteeringGear() interrupt 1
- {
- switch(pwm_flag)
- {
- case 1: servo0=1; TH0=-pwm[0]>>8; TL0=-pwm[0]; break;
- case 2: servo0=0; TH0=-(ms2_5Con-pwm[0])>>8; TL0=-(ms2_5Con-pwm[0]); break;
- case 3: servo1=1; TH0=-pwm[1]>>8; TL0=-pwm[1]; break;
- case 4: servo1=0; TH0=-(ms2_5Con-pwm[1])>>8; TL0=-(ms2_5Con-pwm[1]); break;
- case 5: servo2=1; TH0=-pwm[2]>>8; TL0=-pwm[2]; break;
- case 6: servo2=0; TH0=-(ms2_5Con-pwm[2])>>8; TL0=-(ms2_5Con-pwm[2]); break;
- case 7: servo3=1; TH0=-pwm[3]>>8; TL0=-pwm[3]; break;
- case 8: servo3=0; TH0=-(ms2_5Con-pwm[3])>>8; TL0=-(ms2_5Con-pwm[3]); break;
- case 9: servo4=1; TH0=-pwm[4]>>8; TL0=-pwm[4]; break;
- case 10: servo4=0; TH0=-(ms2_5Con-pwm[4])>>8; TL0=-(ms2_5Con-pwm[4]); break;
- case 11: servo5=1; TH0=-pwm[5]>>8; TL0=-pwm[5]; break;
- case 12: servo5=0; TH0=-(ms2_5Con-pwm[5])>>8; TL0=-(ms2_5Con-pwm[5]); break;
- case 13: servo6=1;TH0=-pwm[6]>>8; TL0=-pwm[6]; break;
- case 14: servo6=0;TH0=-(ms2_5Con-pwm[6])>>8; TL0=-(ms2_5Con-pwm[6]); break;
- case 15: servo7=1;TH0=-pwm[7]>>8; TL0=-pwm[7]; break;
- case 16: servo7=0;TH0=-(ms2_5Con-pwm[7])>>8; TL0=-(ms2_5Con-pwm[7]); break;
- default: TH0=0xff; TL0=0x80; pwm_flag=0;
- }
- pwm_flag++;
- }
-
- void SetSteeringGear(uchar i, uchar val)
- {
- uint a = (val+46)*10;
- if(a<ms0_5Con)
- a=ms0_5Con;
- if(a>ms2_5Con)
- a=ms2_5Con;
- pwm[ i]=a;
- CommandDatatable[2]=0xff; //�������
- }
-
- /********************************************************************
- * ���� : �����Д���Ք�(sh��)��(j��)
- ***********************************************************************/
- /*********************************************************************************
- ** ����(sh��)���� �� ������(sh��)
- *********************************************************************************/
- void main()
- {
- MainLight=0;
- Delay_1ms(200);
- Com_Init();//���ڳ�ʼ��
- Timer0Init();//��C(j��)PWM�Д��ʼ��
- while(1)
- {
- if(CommandDatatable[0]==0XFF && CommandDatatable[4]==0XFF)
- {
- switch (CommandDatatable[1]) //����(j��)�Iֵ��ͬ����(zh��)�в�ͬ�ă�(n��i)��
- {
- case 0X00: //���λ0X00�������ǿ��Ɣ�(sh��)��(j��)�����M(j��n)����Ɣ�(sh��)��(j��)case
- switch(CommandDatatable[2]) //����(j��)��(sh��)��(j��)λ��ֵ���M(j��n)���x���(zh��)�в�ͬ�Ą���
- {
- case 0X00:Moto_Stop();break;
- case 0X01:Moto_Forward();break;
- case 0X02:Moto_Backward();break;
- case 0X03:Moto_TurnLeft();break;
- case 0X04:Moto_TurnRight();break;
- default : break;
- }
- break;
- case 0X01: //���λ0X01�������Ƕ�C(j��)��(sh��)��(j��)�����M(j��n)���C(j��)case
- switch(CommandDatatable[2])
- {
- case 0x01:SetSteeringGear(0,CommandDatatable[3]);break;
- case 0x02:SetSteeringGear(1,CommandDatatable[3]);break;
- case 0x03:SetSteeringGear(2,CommandDatatable[3]);break;
- case 0x04:SetSteeringGear(3,CommandDatatable[3]);break;
- case 0x05:SetSteeringGear(4,CommandDatatable[3]);break;
- case 0x06:SetSteeringGear(5,CommandDatatable[3]);break;
- case 0x07:SetSteeringGear(6,CommandDatatable[3]);break;
- case 0x08:SetSteeringGear(7,CommandDatatable[3]);break;
- default : break;
- }
- break;
- case 0X02: //���λ0X02�������Ǵ����(sh��)��(j��)�����M(j��n)����case
- switch(CommandDatatable[2])
- {
- case 0X01:MainLight=1;break;
- case 0X02:MainLight=0;break;
- default : break;
- }
- break;
- default : break;
- }
- }
- }
- }
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��


