//2015.09.06 于廈門軟二. 程序思想轉(zhuǎn)變
單片機(jī)已經(jīng)學(xué)了4、5年頭了,一直用慣了delay()函數(shù),意識(shí)到電子工程師們的硬件編程思想與PC機(jī)底層編程思想上的很多不同,引發(fā)了一些思考。
學(xué)單片機(jī)時(shí),老師都教我們用Delay()函數(shù)。
絕大多數(shù)8位的單片機(jī)程序,它們的單片機(jī)99.9%的工作時(shí)間都在打空轉(zhuǎn),(是否嚇了一跳,竟然讓單片機(jī)空轉(zhuǎn)以實(shí)現(xiàn)和外界同步,這怎么可能?試想,如果PC機(jī)CPU空轉(zhuǎn)一秒,那么音樂(lè)會(huì)斷一秒、畫(huà)面會(huì)停頓一秒、下載文件會(huì)斷一秒,這怎么可行?)這是一種教條的思想,把書(shū)讀死了。
99.9%大家可能感到有些危言聳聽(tīng),那就讓我們算一算:
已內(nèi)部8M頻的AVR單片機(jī)來(lái)說(shuō),單指令周期僅為1/8 = 0.125us,那一毫秒可以執(zhí)行多少個(gè)單周期指令? 1%0.125*1000 = 8000個(gè)而我看到論壇里下到的絕大多數(shù)程序,兩個(gè)延時(shí)函數(shù)之間代碼的執(zhí)行時(shí)間要遠(yuǎn)遠(yuǎn)小于8000個(gè)指令周期。
說(shuō)實(shí)話,很多16K以上的程序,把所有延時(shí)函數(shù)去掉,總體能執(zhí)行幾毫秒就不錯(cuò)了。換句話說(shuō),我說(shuō)單片機(jī)的利用率小于0.01%還是口下留情了。
要說(shuō)怎么解決問(wèn)題,就要先找到問(wèn)題,我問(wèn)問(wèn)大家,程序中,我們?yōu)槭裁囱訒r(shí)?原因很多,可能是外設(shè)速度太慢,也可能是為了躲過(guò)人眼視覺(jué)停留時(shí)間,等等。總之就是與外界不同步,而我們想要同步。
所以說(shuō)這些延時(shí)應(yīng)該是很有道理的,我不否定這一點(diǎn),但問(wèn)題的關(guān)鍵這些延時(shí)空轉(zhuǎn),我們?yōu)槭裁床荒馨堰@些時(shí)間回收起來(lái)做一些別的事呢?
試想,如果把這99.9%的時(shí)間回收,那可以一筆相當(dāng)巨大的資源。
有很多人有些特殊方法回收過(guò)這些空轉(zhuǎn)時(shí)間,比如說(shuō)在延時(shí)函數(shù)中做點(diǎn)事。
但這些往往都不通用,下面我說(shuō)一些我的兩種方法:
1.從點(diǎn)亮LED(發(fā)光二極管)開(kāi)始
在市面上眾多的單片機(jī)學(xué)習(xí)資料中,最基礎(chǔ)的實(shí)驗(yàn)無(wú)疑于點(diǎn)亮LED了,即控制單片機(jī)的I/O的電平的變化。
如同如下實(shí)例代碼一般
void main(void)
{
LedInit() ;
While(1)
{
LED = ON ;
DelayMs(500) ;
LED = OFF ;
DelayMs(500) ;
}
}
程序很簡(jiǎn)單,從它的結(jié)構(gòu)可以看出,LED先點(diǎn)亮500MS,然后熄滅500MS,如此循環(huán)下去,形成的效果就是LED以1HZ的頻率進(jìn)行閃爍。下面讓我們分析上面的程序有沒(méi)有什么問(wèn)題。
看來(lái)看出,好像很正常的啊,能有什么問(wèn)題呢?這個(gè)時(shí)候我們應(yīng)該換一個(gè)思路去想了。試想,整個(gè)程序除了控制LED = ON ; LED = OFF; 這兩條語(yǔ)句外,其余的時(shí)間,全消耗在了DelayMs(500)這兩個(gè)函數(shù)上。而在實(shí)際應(yīng)用系統(tǒng)中是沒(méi)有哪個(gè)系統(tǒng)只閃爍一只LED就其它什么事情都不做了的。因此,在這里我們要想辦法,把CPU解放出來(lái),讓它不要白白浪費(fèi)500MS的延時(shí)等待時(shí)間。寧可讓它一遍又一遍的掃描看有哪些任務(wù)需要執(zhí)行,也不要讓它停留在某個(gè)地方空轉(zhuǎn)消耗CPU時(shí)間。
從上面我們可以總結(jié)出
(1) 無(wú)論什么時(shí)候我們都要以實(shí)際應(yīng)用的角度去考慮程序的編寫(xiě)。
(2) 無(wú)論什么時(shí)候都不要讓CPU白白浪費(fèi)等待,尤其是延時(shí)(超過(guò)1MS)這樣的地方。
下面讓我們從另外一個(gè)角度來(lái)考慮如何點(diǎn)亮一顆LED。 先看看我們的硬件結(jié)構(gòu)是什么樣子的。
紅色的壓降為1.82-1.88V,電流5-8mA, 綠色的壓降為1.75-1.82V,電流3-5mA, 橙色的壓降為1.7-1.8V,電流3-5mA 蘭色的壓降為3.1-3.3V,電流8-10mA, 白色的壓降為3-3.2V,電流10-15mA, (供電電壓5V,LED直徑為5mm) | 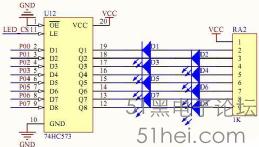
| 74HC573真值表如下: |
一般的LED的正常發(fā)光電流為10~20MA而低電流LED的工作電流在2mA以下(亮度與普通發(fā)光管相同)。在上圖中我們可知,當(dāng)Q1~Q8引腳上面的電平為低電平時(shí),LED發(fā)光。通過(guò)LED的電流約為(VCC - Vd)/ RA2 。其中Vd為L(zhǎng)ED導(dǎo)通后的壓降,約為1.7V左右。這個(gè)導(dǎo)通壓降根據(jù)LED顏色的不同,以及工作電流的大小的不同,會(huì)有一定的差別。下面一些參數(shù)是網(wǎng)上有人測(cè)出來(lái)的,供大家參考。
需要注意的是,通過(guò)74HC573的最大電流是有限制的,否則可能會(huì)燒壞74HC573這個(gè)芯片。 上面這個(gè)圖是從74HC573的DATASHEET中截取出來(lái)的,從上可以看出,每個(gè)引腳允許通過(guò)的最大電流為35mA 整個(gè)芯片允許通過(guò)的最大電流為75mA。在我們?cè)O(shè)計(jì)相應(yīng)的驅(qū)動(dòng)電路時(shí)候,這些參數(shù)是相當(dāng)重要的,而且是最容易被初學(xué)者所忽略的地方。同時(shí)在設(shè)計(jì)的時(shí)候,要留出一定量的余量出來(lái),不能說(shuō)單個(gè)引腳允許通過(guò)的電流為35mA,你就設(shè)計(jì)為35mA,這個(gè)時(shí)候你應(yīng)該把設(shè)計(jì)的上限值定在20mA左右才能保證能夠穩(wěn)定的工作。
(設(shè)計(jì)相應(yīng)驅(qū)動(dòng)電路時(shí)候,應(yīng)該仔細(xì)閱讀芯片的數(shù)據(jù)手冊(cè),了解每個(gè)引腳的驅(qū)動(dòng)能力,以及整個(gè)芯片的驅(qū)動(dòng)能力)
了解了相應(yīng)的硬件后,我們?cè)賮?lái)編寫(xiě)驅(qū)動(dòng)程序。
#include<reg52.h>
sbit LED_SEG = P1^4; //數(shù)碼管段選 sbit LED_DIG = P1^5; //數(shù)碼管位選 sbit LED_CS11 = P1^6; //led控制位 sbit ir=P1^7; //首先定義LED的接口然后為亮滅常數(shù)定義一個(gè)宏 #define LED P0 //定義LED接口 bit g_bSystemTime1Ms = 0 ; // 1MS系統(tǒng)時(shí)標(biāo) //下面到了重點(diǎn)了,究竟該如何釋放CPU,避免其做延時(shí)空等待這樣的事情呢。 很簡(jiǎn)單,我們?yōu)橄到y(tǒng)產(chǎn)生一個(gè)1MS的時(shí)標(biāo)。假定LED需要亮500MS,熄滅500MS,那么我們可以對(duì)這個(gè)1MS的時(shí)標(biāo)進(jìn)行計(jì)數(shù),當(dāng)這個(gè)計(jì)數(shù)值達(dá)到500時(shí)候,清零該計(jì)數(shù)值,同時(shí)把LED的狀態(tài)改變。 unsigned int g_u16LedTimeCount = 0 ; //LED計(jì)數(shù)器 unsigned char g_u8LedState = 0 ; //LED狀態(tài)標(biāo)志, 0表示亮,1表示熄滅 #define LED_ON() LED = 0x00 ; //所有LED亮 #define LED_OFF() LED = 0xff ; //所有LED熄滅 void Timer0Init(void) //定時(shí)器初始化 { TMOD &= 0xf0 ; TMOD |= 0x01 ; //定時(shí)器0工作方式1 TH0 = 0xfc ; //定時(shí)器初始值 TL0 = 0x66 ; TR0 = 1 ; ET0 = 1 ; } void LedProcess(void) //計(jì)時(shí)到_執(zhí)行LED動(dòng)作 { if(0 == g_u8LedState) //如果LED的狀態(tài)為亮,則點(diǎn)亮LED { LED_ON() ; } else //否則熄滅LED { LED_OFF() ; } } void LedStateChange(void) //1ms計(jì)時(shí)到_執(zhí)行動(dòng)作 { if(g_bSystemTime1Ms) //系統(tǒng)1MS時(shí)標(biāo)到 { g_bSystemTime1Ms = 0 ; //在我們的定時(shí)器中斷函數(shù)中對(duì)其置位,其它函數(shù)使用該變量后,應(yīng)該對(duì)其復(fù)位(清0) g_u16LedTimeCount++ ; //LED計(jì)數(shù)器加一 if(g_u16LedTimeCount >= 500) //計(jì)數(shù)達(dá)到500,即500MS到了,改變LED的狀態(tài)。 { g_u16LedTimeCount = 0 ; //LED計(jì)數(shù)器_清0 g_u8LedState = ! g_u8LedState; //LED狀態(tài)標(biāo)志, 0表示亮,1表示熄滅 } } } //因?yàn)長(zhǎng)ED的亮或者滅依賴于LED狀態(tài)變量(g_u8LedState)的改變,而狀態(tài)變量的改變,又依賴于LED計(jì)數(shù)器的計(jì)數(shù)值(g_u16LedTimeCount ,只有計(jì)數(shù)值達(dá)到一定后,狀態(tài)變量才改變)所以,兩個(gè)函數(shù)都沒(méi)有堵塞CPU的地方。 void main(void) { Timer0Init() ; EA = 1 ; LED_CS11 = 1 ; //74HC595輸出允許 LED_SEG = 0 ; //數(shù)碼管段選和位選禁止(因?yàn)樗鼈兒蚅ED共用P0口) LED_DIG = 0 ; while(1) { LedProcess() ; // LedStateChange() ; //計(jì)時(shí)到_執(zhí)行動(dòng)作 } } void Time0Isr(void) interrupt 1 { TH0=0xfc; //定時(shí)器重新賦初值 TL0=0x66; //每1ms溢出1次 g_bSystemTime1Ms=1; //1ms時(shí)標(biāo)“標(biāo)志位”置位 } |
因?yàn)長(zhǎng)ED的亮或者滅依賴于LED狀態(tài)變量(g_u8LedState)的改變,而狀態(tài)變量的改變,又依賴于LED計(jì)數(shù)器的計(jì)數(shù)值(g_u16LedTimeCount ,只有計(jì)數(shù)值達(dá)到一定后,狀態(tài)變量才改變)所以,兩個(gè)函數(shù)都沒(méi)有堵塞CPU的地方。讓我們來(lái)從頭到尾分析一遍整個(gè)程序的流程。
程序首先執(zhí)行LedProcess() ;函數(shù)因?yàn)間_u8LedState 的初始值為0 (見(jiàn)定義,對(duì)于全局變量,在定義的時(shí)候最好給其一個(gè)確定的值)所以LED被點(diǎn)亮,然后退出LedStateChange()函數(shù),執(zhí)行下一個(gè)函數(shù)LedStateChange()
在函數(shù)LedStateChange()內(nèi)部首先判斷1MS的系統(tǒng)時(shí)標(biāo)是否到了,如果沒(méi)有到就直接退出函數(shù),如果到了,就把時(shí)標(biāo)清0以便下一個(gè)時(shí)標(biāo)消息的到來(lái),同時(shí)對(duì)LED計(jì)數(shù)器加一,然后再判斷LED計(jì)數(shù)器是否到達(dá)我們預(yù)先想要的值500,如果沒(méi)有,則退出函數(shù),如果有,對(duì)計(jì)數(shù)器清0,以便下次重新計(jì)數(shù),同時(shí)把LED狀態(tài)變量取反,然后退出函數(shù)。
由上面整個(gè)流程可以知道,CPU所做的事情,就是對(duì)一些計(jì)數(shù)器加一,然后根據(jù)條件改變狀態(tài),再根據(jù)這個(gè)狀態(tài)來(lái)決定是否點(diǎn)亮LED。這些函數(shù)執(zhí)行所花的時(shí)間都是相當(dāng)短的,如果主程序中還有其它函數(shù),則CPU會(huì)順次往下執(zhí)行下去。對(duì)于其它的函數(shù)(如果有的話)也要采取同樣的措施,保證其不堵塞CPU,如果全部基于這種方法設(shè)計(jì),那么對(duì)于不是非常龐大的系統(tǒng),我們的系統(tǒng)依舊可以保證多個(gè)任務(wù)(多個(gè)函數(shù))同時(shí)執(zhí)行。系統(tǒng)的實(shí)時(shí)性得到了一定的保證,從宏觀上看來(lái),就是多個(gè)任務(wù)并發(fā)執(zhí)行。
好了,這一章就到此為止,讓我們總結(jié)一下,究竟有哪些需要注意的吧。
(1) 無(wú)論什么時(shí)候我們都要以實(shí)際應(yīng)用的角度去考慮程序的編寫(xiě)。
(2) 無(wú)論什么時(shí)候都不要讓CPU白白浪費(fèi)等待,尤其是延時(shí)(超過(guò)1MS)這樣的地方。
(3) 設(shè)計(jì)相應(yīng)驅(qū)動(dòng)電路時(shí)候,應(yīng)該仔細(xì)閱讀芯片的數(shù)據(jù)手冊(cè),了解每個(gè)引腳的驅(qū)動(dòng)能力,以及整個(gè)芯片的驅(qū)動(dòng)能力
(4) 最重要的是,如何去釋放CPU(參考本章的例子),這是寫(xiě)出合格程序的基礎(chǔ)。





 或許會(huì)有更好解決cpu堵塞的方法
或許會(huì)有更好解決cpu堵塞的方法
