|
|
���M늙C��һ�N����}�_��̖�D�Q�龀λ�ƻ��λ�Ƶ�늙C�������M늙C�Ŀ���ͨ�������ÅR���Z�Ի�C�Z���M��ܛ���_�l�����ĽY��SC3���M늙C��������ƽ���_�Ŀ����_�l��������B��һ�N�����Windowsƽ�_������Visual C++6.0�ṩ�Ĵ���ͨ�ſؼ�MSComm�팍�FPC�C�c���M늙C������֮�g�Ĕ���ͨӍ����K���F��PC�Cֱ�ӿ��Ʋ��M늙C�ķ�������Ԕ����B�˾�������ͨ�ų���Ļ������E�ͷ������{ԇ�Y���������OӋ�Ŀ��Ƴ��Ρ����������ɿ����Ҿ����Ѻõ��˙C�������档
���M늙C��һ�N����}�_�D�����λ�ƵęC�ʽ��ģ�D�Q�����ڿ���ϵ�y�о���ʮ�֏V������;�������y�IJ��M늙C�Ŀ���ͨ�������ÅR���Z�Ի�C�Z���M��ܛ���_�l����������VC++�ṩ�Ĵ���ͨ�ſؼ�MSComm���FPC�C�c���M늙C������֮�g�Ĵ���ͨ�ţ�1�ݡ��c DOS�´���ͨ�ų���ͬ���ǣ�Windows���ᳫ���ó���ֱ�ӿ���Ӳ��������ͨ�^Windows����ϵ�y�ṩ���O���ӳ�����M�Д������͡����п���Win32���������ļ����M��̎���ģ�������ֱ�ӌ��˿��M�в��������ڴ���ͨ�ţ�Win32�ṩ���������ļ�I/O�����cͨ�ź�����ͨ�^�˽��@Щ������ʹ�ã����Ծ��Ƴ����ϲ�ͬ��Ҫ��ͨ�ų���
���F����ͨ�ţ�2��һ����3�N������3�ݣ�ʹ��VC++�ṩ�Ĵ���ͨ�ſؼ�MSComm��4�ݣ��چξ����Ќ��F�Զ��x�Ĵ���ͨ����ྀ�����F����ͨ�š��Y�ό��H��r����ϵ�y����VC++�ṩ�Ĵ���ͨ�ſؼ�MSComm���M��ܛ�����̣����Ժܷ���ع����c����Ӌ��C���ڡ�
1��ϵ�y�M��
��PC�C���Ʋ��M늄әC��ϵ�y��D1��ʾ��
�D1 PC�C���Ʋ��M늙Cϵ�y��D
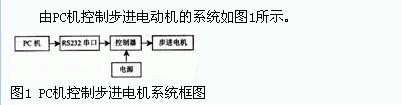
��ϵ�y��늙C���Ʋ���ͨ�õ�RS 232��5�ݴ��ڵĮ���ͨ�š�����RS 232�����Ǟ���M�����Ԓ�W�j�M�Д���ͨ�Ŷ��ƶ��Ę˜ʣ���߉�ƽ�����nj��Q�ģ��cTTL��MOS߉�ƽ��ȫ��ͬ��߉0�ƽҎ����+5��+15 V֮�g��߉1�ƽҎ����-5��-15 V֮�g����ˣ�RS 232�����cTTL�ƽ�B�ӱ�횽��^�ƽ�D�Q��
2������ܛӲ���ļ��g����
��ϵ�y�������h��x������˾���a��SC3���M늙C��������ƽ���_�����Fƽ���_�����S���ƣ�x��y��z��������RS 232���ڮ���ͨ����Ɍ����M늙C�Ćβ����B�m�Ƅӿ��ƣ����Ұ�늙C�Č��Hλ�Ô��������oPC�C̎����
늿�ƽ���_�ęCеָ�����£�
��1�� ����늿����D�_����̖RSA200����x�S���D�ӷ���>��40�㣻���ӱ�180��1��С����0.000 312 5�㣻�_��ֱ����200���ֱ���0.001 25�㣻�؏Ͷ�λ����<0.005�㣻����ٶ�25/s���������ؓ�d60 kg��
��2�� ���d��늿�ƽ���_����̖TSA300B������z�S����С����0.003 15 mm���؏Ͷ�λ����<0.005 mm���ӹ̶�ƽ���_��Ч�г̞�150 mm��
��3�� ������늿�ƽ���_����̖TSA30C������y�S����С������0.002 mm���؏Ͷ�λ����<0.005 mm����Ч�г�30 mm��SC3���M늙C�������O���քӺ��ӷ�ʽ���ք����O�õIJ����У��ٶ��O�����w������������O����λ�����O���ȣ��C��ʽ����ʹ늙C���\��ֱ���ܑ���ܛ�����ơ��������M�ж����_�l����ˑ��ó�����Ƕ��ԭ�������Ŀ���ָ��f�h��
ԓָ��ϵ�y��Ҫ�����חl��
�jָ��ָ���ʽ������R" & CHR$��13��
ԓָ��l��200 ms�ԃ�SC3���ͣ���OK��& CHR$��10������ʾ�j�ɹ���
��ԃָ��ָ���ʽ������V��& CHR$��13��
SC3�ӵ�ԓָ�����ͣ���V number�� & CHR$��10��������number��ASC�a��ʾ��SC3��ǰ�ٶ�ֵ������0��255��
���˲�ԃָ��ָ���ʽ������X��& CHR$��13�� ��Y��& CHR$��13����Z��& CHR$��13��
SC3�ӵ�ԓָ�����ͣ���X+number�� & CHR$��10������Xnumber�� & CHR$��10���������S��ơ�����number����ASC�a��ʾ��SC3��ǰ����ֵ����̖ؓ������ǰλ�����_�Cλ�ã�0λ������ؓ�����λ�á�
�ٶ��O��ָ��ָ���ʽ����V��& number & CHR$��13��
����number����ASC�a��ʾ���ٶ��O��ֵ������0��255��
�w��ָ��ָ���ʽ����HX��& CHR$��13�� ��HY��& CHR$��13�� ��HZ��& CHR$��13��
SC3�ӵ����ָ����M�Кw���������ɚw���������ͣ���OK��& CHR$��10������ʾSC3�w���ꮅ��
���B��ԃָ��ָ���ʽ������H��& CHR$��13��
SC3�ӵ����ָ�����ͣ���H000�� & CHR$��10��
����000��x��
��һλ��ֵ��1��ʾz�S�w��ɹ���0��ʾz�Sδ�w�㡣
�ڶ�λ��ֵ��1��ʾy�S�w��ɹ���0��ʾy�Sδ�w�㡣
����λ��ֵ��1��ʾx�S�w��ɹ���0��ʾx�Sδ�w�㡣
�\��ָ��ָ���ʽ����Xdirectionnumber��& CHR$��13����Y directionnumber��& CHR$��13����Z directionnumber��& CHR$��13��
3��ܛ�����F
3.1 ����VC++�ṩ�Ĵ���ͨ�ſؼ�MSComm���F����ͨ��
���ȣ���VC++��5�ݵČ�Ԓ���Є���ͨ�ſؼ�����Control���ߙ���ȱ��ԓ�ؼ�����ͨ�^�ˆ�Project��Add to��Project��Components and Control���뼴�ɣ��ٌ�ԓ�ؼ��Ĺ�����������Ԓ���С��˕r����ֻ��Ҫ�P�Ŀؼ��ṩ�Č�Windowsͨ���ӳ����API�����Ľӿڣ���ֻ��Ҫ�O�úͱOҕMSComm�ؼ��Č��Ժ��¼���
��ClassWizard�О��½���ͨ�ſؼ����x�ɆT����CMSComm m_Serial����ͨ�^ԓ�������Ԍ����ڌ����M���O�ã�MSComm�ؼ�����27�����ԣ�������Ҫ������
Commport���O�ò�����ͨ�Ŷ˿�̖��ȱʡ��COM1��
Settings�����ַ�������ʽ�O�ò����ز����ʡ���żУ����λ��ֹͣλ��
PortOpen���O�ò�����ͨ�Ŷ˿ڵĠ�B��Ҳ���Դ��_���P�]�˿ڡ�
Input���Ľ��վ��_�^���غ̈́h���ַ���
Output����l�;��_�^�����ַ�����
InputLen��ÿ���O��Input�x����ַ�������ȱʡֵ��0�������xȡ���վ��_�^�е�ȫ�����ݡ�
InBufferCount�����ؽ��վ��_�^���ѽ��յ����ַ�����������0����������վ��_�^��
InputMode�����xInput���ԫ@ȡ�����ķ�ʽ����0���ı���ʽ����1�����M�Ʒ�ʽ����
RThreshold��SThreshold���ԣ���ʾ��OnComm�¼��l��֮ǰ�����վ��_�^��l�;��_�^�пɽ��յ��ַ�����
������ͨ�^�O�ÿؼ����Ԍ������M�г�ʼ���Č�����
���_���贮�ں���Ҫ���]����ͨ�ŵĕr�C���ڽ��ջ�l�͔����^���У�������Ҫ�Oҕ��푑�һЩ�¼����e�`�������¼�����̎�����ж˿ڽ������õ�һ�N�dz���Ч�ķ�����ʹ��OnComm�¼���CommEvent���Բ����z��ͨ���¼����e�`��ֵ���l��ͨ���¼����e�`�r�����|�lOnComm�¼���CommEvent���Ե�ֵ������׃�����ó���z��CommEvent����ֵ�����������ķ������ڳ�������ClassWizard��CMSComm�ؼ�����OnComm��Ϣ̎��������
3.2 ϵ�y��ʼ��
�ڈ��Б��ó���r���ȱ���M�г�ʼ�������ʼ�������D��D2��ʾ��
�D2 ��ʼ�������D
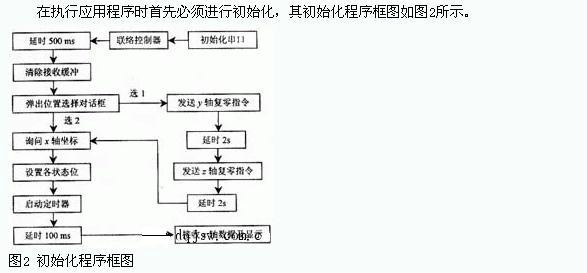
�\�г���r��ҕ�D���г�ʼ����������OnInitialUpdate������ԓ������Ҫ�ȴ��_����1��ͨ�^�O�Ì���m_ContrCom���ɆT�������O�úø�ͨ�Ņ�����
Ȼ���^һ��λ���x��Ԓ��ͨ���x������ԭ����λ�á���Ȼ��Ͱl��ԃ�����S������ֵ��ָ�������D2��ʾ����x�S��ֱ�Ӱl������ԃ��ָ��@�����˔����⣬����2���S����ͨ�^�B�m��2�����r����ԃ�����˵ģ����r��푑�����ЈD3�ij��˺���M����������档
3.3 �\�в����ľ���
��늙C�\�Ӳ����^�ĸ��ı����ݔ��ijһ�S���λ��ֵ���ٶ�ֵ�����¡��\�С����o���t�������λ��ֵ�D�����ַ��͵Č��HҪ�\�еIJ�����ͨ�^�����͵�SC3���M늙C�����������ƌ������S��늙C�\�������IJ������\�нY����SC3������һ����OK���ַ������ڣ�PC�C���ܵ��@���ַ���֪��늙C�\�нY����Ȼ���ڰl������ԃ��ָ�SC3���������P���˔�����PC�C�ӵ��@Щ�������M��̎���\�㲢���ı������@ʾ�������@�ӾͽY����һ���������\�в�����
������Ҫ��PC�C��SC3�����������P����ͨ�ų�����MSComm�ؼ��ȡ��������еĽ��ܡ��R�e�����ַ������S�����˵��\����@ʾ��
�����M�\���ꮅ���ص�PC�C�Ĕ����鲽�M늙C�ѽ��\�еIJ����������@������ҪӋ�����������ˣ����֪�����S���}�_���������M늙Cÿ��һ��������_��λ�Ƶ����}�_���������ֱ��ʡ�
����ֵ=��ʼ����+�\�в������}�_����
ƽ���_�}�_����=�z�܌���mm�������/��360�����֔���
���D�_��x�S�����}�_�������ȣ�=���M늙C�����/�����ӱȣ����֔���
���м��֔����ɿ����������ܴa�_�P�O�õġ�
���M늙C�IJ���Ƕ���1.8�㣬�v�S�Ľz�܌��̞�1 mm���M�S��4 mm�����D�S���ӱȞ�180��1�����֔���2���t�������Ϲ�ʽ�ɵó���
�v�S��z���}�_����=1/100
�M�S��y���}�_����=1/400
���D�S��x���}�_����=1/200
4���Y�Z
��PC�C�͆�Ƭ�C֮�g���F����ͨ�ſ����ǽ�������ܚgӭ���^�����еķ��������Ľ�B���\��MSComm�ؼ������Ƶ���PC�C�����M늙Cֱ�ӿ��Ƶđ���ܛ�������Ѻõ��˙C�������棬�Ҿ��̺��㡢�����ɿ�����һ�N�Ќ���Ч�ķ�����ͬ�r���@�N���п��Ʒ����ͼ��g߀���\���������Ĺ��I���ƈ��ϡ�
|
|


 ����TQQ:125739409;���g����QQȺ281945664
����TQQ:125739409;���g����QQȺ281945664


