|
�l(f��)���r(sh��)�g: 2024-12-18 16:12
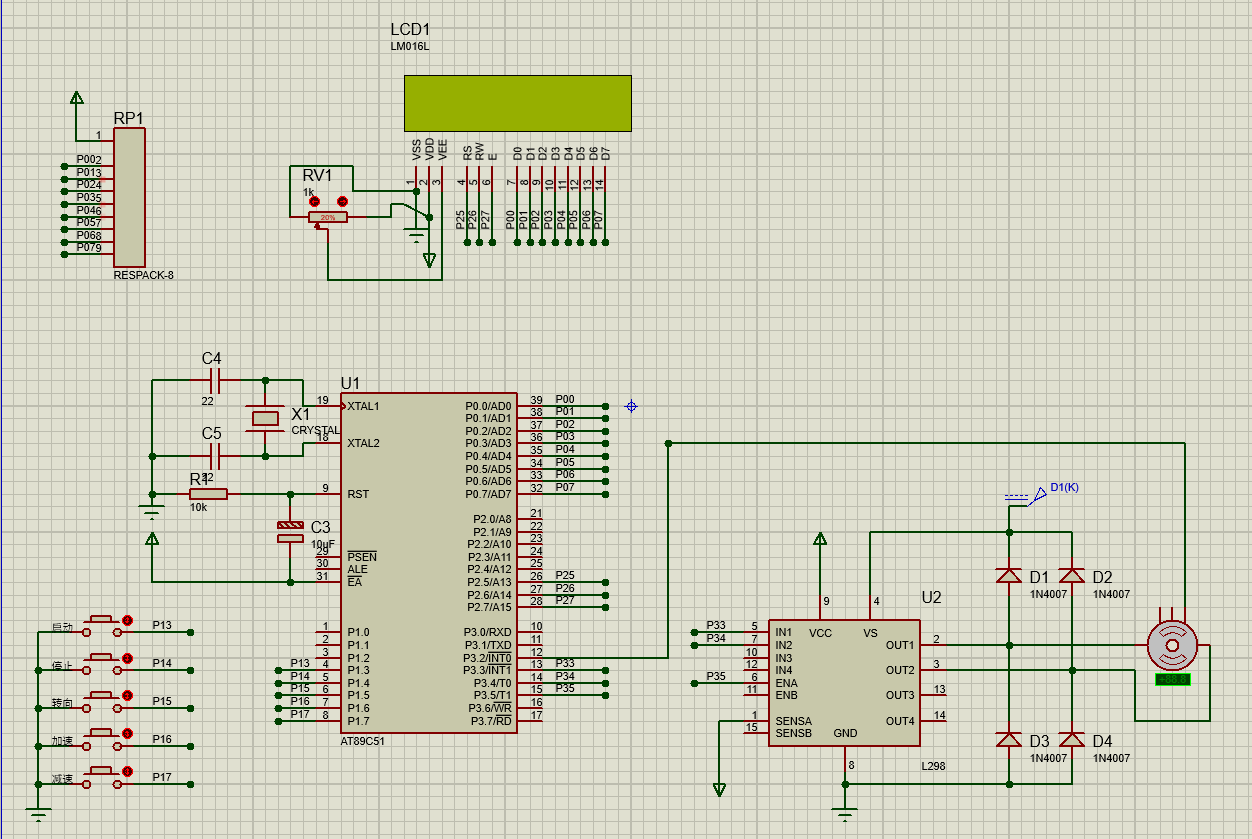
����ժҪ:�@��һ��(g��)Փ���ϸ磨 ID:171036��20�ꌑ����һ�����Ҳ���(hu��)�{(di��o)�ˣ�����늙C(j��)�Č�(sh��)�H�D(zhu��n)���cĿ��(bi��o)�D(zhu��n)��һ�� /*PID�ą���(sh��)�O(sh��)�ÿ��ԅ�������(l��i)�M(j��n)��: ����(sh��)��������ѣ���С��������; ���DZ����� ... |
|
1,���@��(g��)늙C(j��)���Ʋ�����ҪD�(xi��ng),PI���ƾ������ 2,I�(xi��ng)��Ҫ�� 3,�^�����Ʋ��^�dz��������ϵ���Ҫ����,���@��(g��)�·�����x���� |
| PID �ٶȿ��Ƶ�Ŀ�IJ���ʹ��(sh��)�Hݔ���ٶȵ���Ŀ��(bi��o)�ٶȆ ����������_���t���������ڱ������e�ֺ���ϵ��(sh��)ȱ���{(di��o)���� |
| ��ô�����{(di��o)��(ji��) ���M(j��n)늙C(j��)�IJ���(sh��)�� |
| �Ҝy(c��)ԇ��һЩ���džιܿ��ƣ��^�_���^��(y��n)�أ���ܾã������ǰ�e������ֵ���Ҿ��a��60�}�_��ֻ��һ��(g��)��̖(h��o)��0.1��һ��(g��)�y(c��)�����ڣ�ݔ���i����+��10�D(zhu��n)��������?y��n)�����e��ֵ��ʹ����׃�ı��^�������⣬���ǿ��Ԍ�(sh��)�F(xi��n)���d�r(sh��)�i���ٶȣ�200-3000֮�g�����ԣ�Ŀǰ�]�Мy(c��)ԇ���d��r����?y��n)����߀Ҫ���ƣ�Ŀǰ�]�кõ����������ð��� |
| �һ�� |
С����|51�����Փ��
|
 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664
Powered by ��Ƭ�C(j��)�̳̾W(w��ng)

 �ղ�
�ղ� �
� ��
��