熱門: 51單片機(jī) | 24小時(shí)必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
熱門: 51單片機(jī) | 24小時(shí)必答區(qū) | 單片機(jī)教程 | 單片機(jī)DIY制作 | STM32 | Cortex M3 | 模數(shù)電子 | 電子DIY制作 | 音響/功放 | 拆機(jī)樂園 | Arduino | 嵌入式OS | 程序設(shè)計(jì)
|
發(fā)布時(shí)間: 2015-3-20 06:27
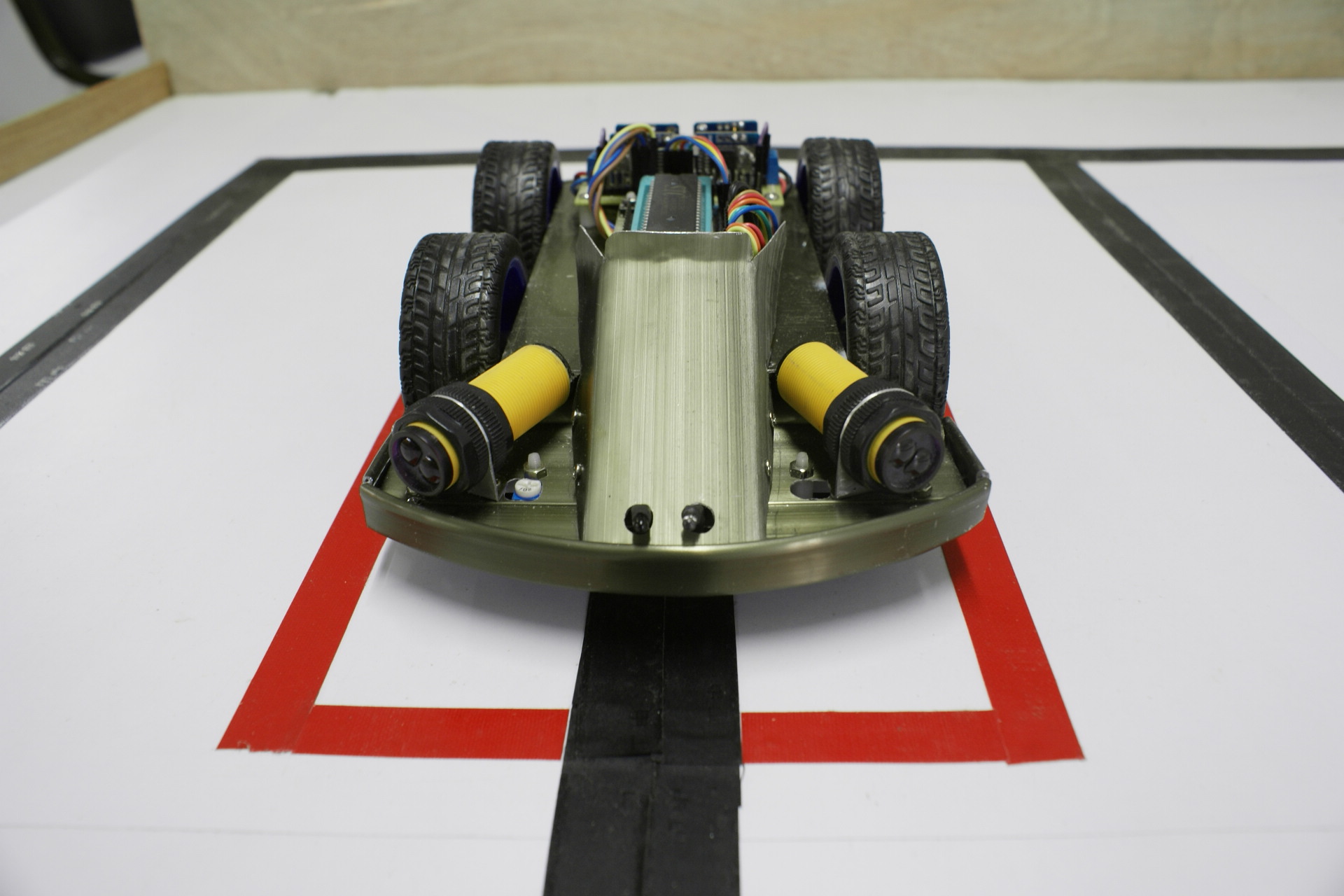
正文摘要:最近做了個(gè)能做“田”字的智能小車,但不盡如人意,就是不能高速在丁字路口轉(zhuǎn)彎。現(xiàn)在把它的照片與視頻發(fā)上,以向行家求教。 想求教的問題: 1.問題描述:當(dāng)車循跡到丁字路口時(shí),如果車速過高,就不能轉(zhuǎn)彎 ... |
| 你改變循跡傳感器的排列位置,中間放在前面,左右傳感器放在后面一條線上,就是三角排列試試,應(yīng)該會(huì)解決。 |
| 我也做智能小車,遇障礙物轉(zhuǎn)彎。由于采用的是一個(gè)單片機(jī)控制兩個(gè)步進(jìn)電機(jī),一個(gè)轉(zhuǎn)彎,一個(gè)直線,由于整體采用中斷控制原理所以出現(xiàn)了和你一樣的問題。由于單片機(jī)原理上是執(zhí)行主代碼時(shí),遇到中斷停止主代碼,轉(zhuǎn)向中斷程序,所以這個(gè)是運(yùn)行原理上的問題,要好的話采用兩個(gè)單片機(jī)控制,使這兩個(gè)單片機(jī)保持串口通信,這樣就不會(huì)出現(xiàn)轉(zhuǎn)彎時(shí)等于死機(jī)這種情況了。這就是思想,程序你自己寫吧。 |
Powered by 單片機(jī)教程網(wǎng)

 收藏
收藏 頂
頂 踩
踩
