
#include "msp430G2553.h"
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
//毫秒延遲函數
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
//納米延遲函數
void delayns(int ns)
{
while(ns--);
}
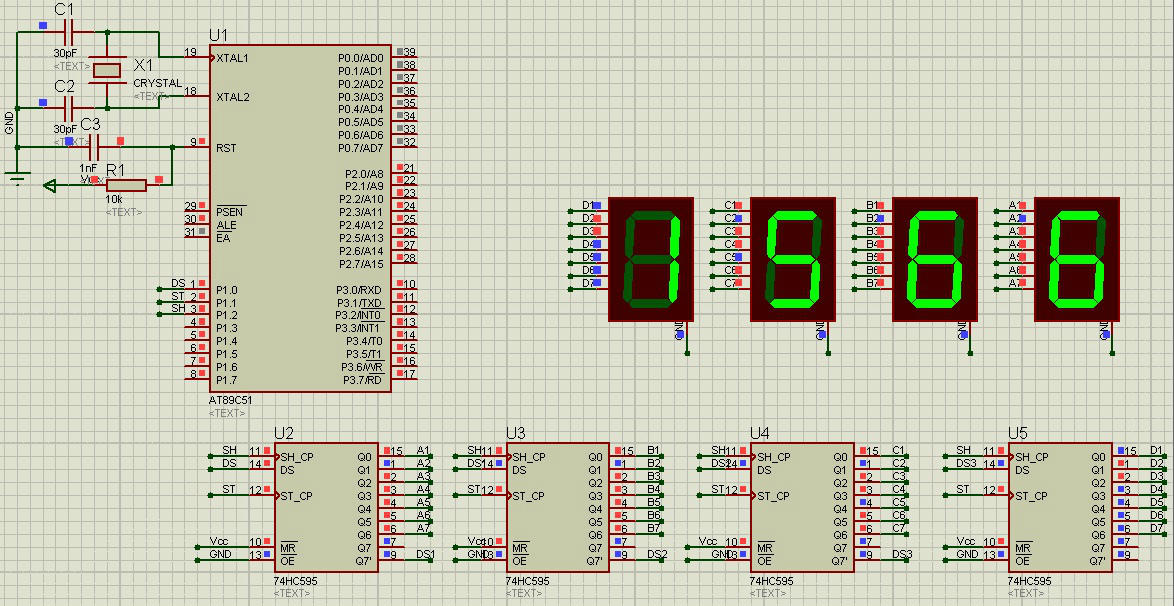
void display(temp)//現實位置P2.0=SH;P2.1=ST;P2,2=DS
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
P2OUT |=BIT2;
}
else
{
P2OUT &=~BIT2;
}
P2OUT &=~BIT0;
delayns(10);
P2OUT |=BIT0;
}
P2OUT &=~BIT1;
delayns(10);
P2OUT |=BIT1;
}
int main( void )
{
// Stop watchdog timer to prevent time out reset
WDTCTL = WDTPW + WDTHOLD;
P2DIR |=0x07;
int m,time,temp;
while(1)
{
m=P1IN;
//顯示
temp=tab[(2*m)%10];//個位
display(temp);
temp=tab[(2*m)/10];//十位
display(temp);
//脈寬
if(m<=9) time +=10;
if(m>15) time -=30;
P2OUT |=BIT3;
delay(time);
P2OUT &=~BIT3;
delay(20);
}
}
#include"reg51.h"
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
//毫秒延遲函數
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
//納米延遲函數
void delayns(int ns)
{
while(ns--);
}
void display(temp)//現實位置P2.0=SH;P2.1=ST;P2,2=DS
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
P2OUT |=BIT2;
}
else
{
P2OUT &=~BIT2;
}
P2OUT &=~BIT0;
delayns(10);
P2OUT |=BIT0;
}
P2OUT &=~BIT1;
delayns(10);
P2OUT |=BIT1;
}
int main( void )
{
// Stop watchdog timer to prevent time out reset
WDTCTL = WDTPW + WDTHOLD;
P2DIR |=0x07;
int m,time,temp;
while(1)
{
m=P1IN;
//顯示
temp=tab[(2*m)%10];//個位
display(temp);
temp=tab[(2*m)/10];//十位
display(temp);
//脈寬
if(m<=9) time +=10;
if(m>15) time -=30;
P2OUT |=BIT3;
delay(time);
P2OUT &=~BIT3;
delay(20);
}
}
#include"reg51.h"
sbit DS_595= P1^0;
sbit CT_595= P1^1;
sbit CH_595= P1^2;
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
void delayns(int ns)
{
while(ns--);
}
void WR_595(void)
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
DS_595=1;
}
else
{
DS_595=0;
}
CH_595=0;
delayns(10);
CH_595=1;
}
}
void main()
{
int m;
for(m=0;m<10000;m++)
{
temp=tab[m/1000];
WR_595();
CT_595=0;
delayns(10);
CT_595=1;
temp=tab[(m%1000)/100];
WR_595();
CT_595=0;
delayns(10);
CT_595=1;
temp=tab[((m%1000)%100)/10];
WR_595();
CT_595=0;
delayns(10);
CT_595=1;
temp=tab[((m%1000)%100)%10];
WR_595();
CT_595=0;
delayns(10);
CT_595=1;
delay(200);
}
}
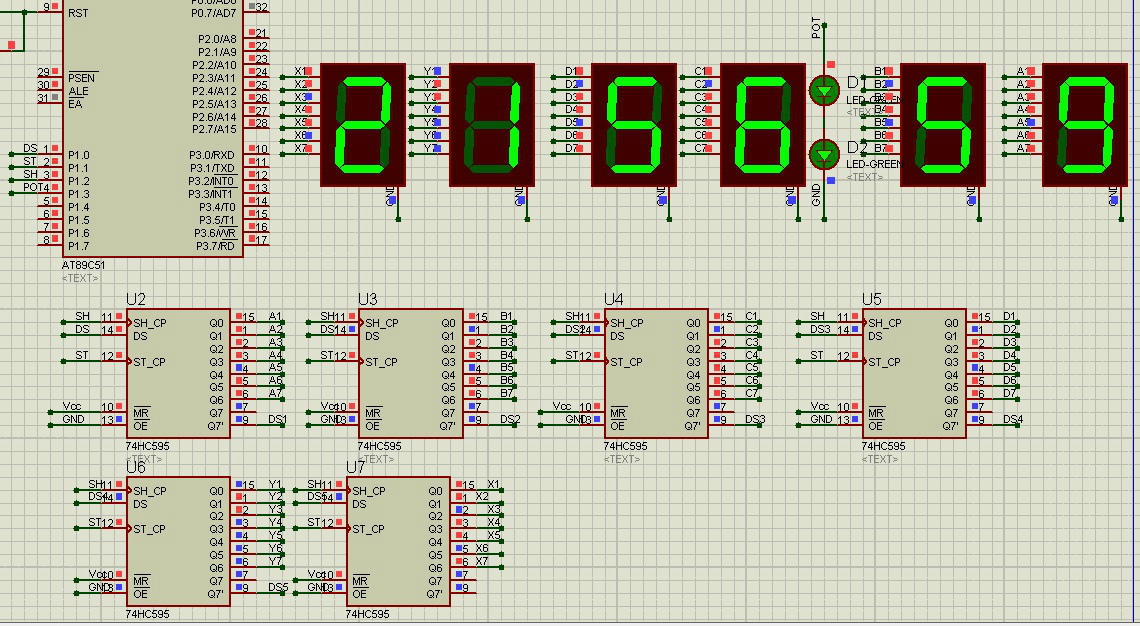
串行通信時鐘程序
串行通信時鐘程序
#include"reg51.h"
sbit DS_595= P1^0;
sbit CT_595= P1^1;
sbit CH_595= P1^2;
sbit POT =P1^3;
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
void delayns(int ns)
{
while(ns--);
}
void WR_595(void)
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
DS_595=1;
}
else
{
DS_595=0;
}
CH_595=0;
delayns(10);
CH_595=1;
}
}
void main()
{
int hour,min,sec;
while(1)
{
sec++;
if(sec==60)
{
sec=0;
min++;
if(min==60)
{
min=0;hour++;
if(hour==24)hour=0;
}
}
temp=tab[hour/10];
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[hour%10];//245959
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[min/10];//5900
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[min%10];
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[sec/10];
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[sec%10];
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
delay(300);
POT=~POT;
delay(300);
POT=~POT;
}
74HC595芯片是一種串入并出的芯片,在電子顯示屏制作當中有廣泛的應用。
74HC595是8位串行輸入/輸出或者并行輸出移位寄存器,具有高阻、關、斷狀態。
三態。特點 8位串行輸入 8位串行或并行輸出 存儲狀態寄存器,三種狀態 輸出寄存器可以直接清除 100MHz的移位頻率 輸出能力 并行輸出,總線驅動 串行輸出;
標準 中等規模集成電路應用 串行到并行的數據轉換 Remote control holding register. 描述 595是告訴的硅結構的CMOS器件, 兼容低電壓TTL電路,遵守JEDEC標準。
595是具有8位移位寄存器和一個存儲器,三態輸出功能。 移位寄存器和存儲器是分別的時鐘。數據在SCHcp的上升沿輸入,在STcp的上升沿進入的存儲寄存器中去。如果兩個時鐘連在一起,則移位寄存器總是比存儲寄存器早一個脈沖。 移位寄存器有一個串行移位輸入(Ds),和一個串行輸出(Q7’),和一個異步的低電平復位,存儲寄存器有一個并行8位的,具備三態的總線輸出,當使能OE時(為低電平),存儲寄存器的數據輸出到總線。
CPD決定動態的能耗, PD=CPD×VCC×f1+∑(CL×VCC2×f0) F1=輸入頻率,CL=輸出電容 f0=輸出頻率(MHz) Vcc=電源電壓 引腳說明符號引腳描述
內部結構
結合引腳說明就能很快理解 595的工作情況
74HC595引腳圖,管腳圖
______________________
QB--|1 16|--Vcc
QC--|2 15|--QA
QD--|3 14|--SI(DS)
QE--|4 13|--/G(/OE)
QF--|5 12|--RCK(ST_CP)
QG--|6 11|--SRCK(SH_CP)
QH--|7 10|--/SRCLR(/MR)
GND- |8 9|--QH'
________________________
74595的數據端:
QA--QH: 八位并行輸出端,可以直接控制數碼管的8個段。
QH': 級聯輸出端。我將它接下一個595的SI端。
SI: 串行數據輸入端。
74595的控制端說明:
/SRCLR(10腳): 低點平時將移位寄存器的數據清零。通常我將它接Vcc。
SRCK(11腳):上升沿時數據寄存器的數據移位。QA-->QB-->QC-->...-->QH;下降沿移位寄存器數據不變。(脈沖寬度:5V時,大于幾十納秒就行了。我通常都選微秒級)
RCK(12腳):上升沿時移位寄存器的數據進入數據存儲寄存器,下降沿時存儲寄存器數據不變。(通常我將RCK置為低電平,) 當移位結束后,在RCK端產生一個正脈沖(5V時,大于幾十納秒就行了。我通常都選微秒級),更新顯示數據。
/G(13腳): 高電平時禁止輸出(高阻態)。如果單片機的引腳不緊張,用一個引腳控制它,可以方便地產生閃爍和熄滅效果。比通過數據端移位控制要省時省力。
注:
1)74164和74595功能相仿,都是8位串行輸入轉并行輸出移位寄存器。74164的驅動電流(25mA)比74595(35mA)的要小,14腳封裝,體積也小一些。
2)74595的主要優點是具有數據存儲寄存器,在移位的過程中,輸出端的數據可以保持不變。這在串行速度慢的場合很有用處,數碼管沒有閃爍感。
1)74164和74595功能相仿,都是8位串行輸入轉并行輸出移位寄存器。74164的驅動電流(25mA)比74595(35mA)的要小,14腳封裝,體積也小一些。
2)74595的主要優點是具有數據存儲寄存器,在移位的過程中,輸出端的數據可以保持不變。這在串行速度慢的場合很有用處,數碼管沒有閃爍感。
與164只有數據清零端相比,595還多有輸出端時能/禁止控制端,可以使輸出為高阻態。
3)595是串入并出帶有鎖存功能移位寄存器,它的使用方法很簡單,在正常使用時SCLR為高電平, G為低電平。從SER每輸入一位數據,串行輸595是串入并出帶有鎖存功能移位寄存器,它的使用方法很簡單,如下面的真值表,在正常使用時SCLR為高電平, G為低電平。從SER每輸入一位數據,串行輸入時鐘SCK上升沿有效一次,直到八位數據輸入完畢,輸出時鐘上升沿有效一次,此時,輸入的數據就被送到了輸出端。入時鐘SCK上升沿有效一次,直到八位數據輸入完畢,輸出時鐘上升沿有效一次,此時,輸入的數據就被送到了輸出端。
3)595是串入并出帶有鎖存功能移位寄存器,它的使用方法很簡單,在正常使用時SCLR為高電平, G為低電平。從SER每輸入一位數據,串行輸595是串入并出帶有鎖存功能移位寄存器,它的使用方法很簡單,如下面的真值表,在正常使用時SCLR為高電平, G為低電平。從SER每輸入一位數據,串行輸入時鐘SCK上升沿有效一次,直到八位數據輸入完畢,輸出時鐘上升沿有效一次,此時,輸入的數據就被送到了輸出端。入時鐘SCK上升沿有效一次,直到八位數據輸入完畢,輸出時鐘上升沿有效一次,此時,輸入的數據就被送到了輸出端。
其實,看了這么多595的資料,覺得沒什么難的,關鍵是看懂其時序圖,說到底,就是下面三步(引用):
第一步:目的:將要準備輸入的位數據移入74HC595數據輸入端上。
方法:送位數據到 P1.0。
方法:送位數據到 P1.0。
第二步:目的:將位數據逐位移入74HC595,即數據串入
方法:P1.2產生一上升沿,將P1.0上的數據移入74HC595中.從低到高。
方法:P1.2產生一上升沿,將P1.0上的數據移入74HC595中.從低到高。
第三步:目的:并行輸出數據。即數據并出
方法:P1.1產生一上升沿,將由P1.0上已移入數據寄存器中的數據
送入到輸出鎖存器。
方法:P1.1產生一上升沿,將由P1.0上已移入數據寄存器中的數據
送入到輸出鎖存器。
說明: 從上可分析:從P1.2產生一上升沿(移入數據)和P1.1產生一上升沿
(輸出數據)是二個獨立過程,實際應用時互不干擾。即可輸出數據的
同時移入數據。
(輸出數據)是二個獨立過程,實際應用時互不干擾。即可輸出數據的
同時移入數據。
而具體編程方法為
如:R0中存放3FH,LED數碼管顯示“0”
;*****接口定義:
DS_595 EQU P1.0 ;串行數據輸入(595-14)
CH_595 EQU P1.2 ;移位時鐘脈沖(595-11)
CT_595 EQU P1.1 ;輸出鎖存器控制脈沖(595-12)
DS_595 EQU P1.0 ;串行數據輸入(595-14)
CH_595 EQU P1.2 ;移位時鐘脈沖(595-11)
CT_595 EQU P1.1 ;輸出鎖存器控制脈沖(595-12)
;*****將移位寄存器內的數據鎖存到輸出寄存器并顯示
OUT_595:
CALL WR_595 ;調用移位寄存器接收一個字節數據子程序
CLR CT_595 ;拉低鎖存器控制脈沖
NOP
NOP
SETB CT_595 ;上升沿將數據送到輸出鎖存器,LED數碼管顯示“0”
NOP
NOP
CLR CT_595
RET
OUT_595:
CALL WR_595 ;調用移位寄存器接收一個字節數據子程序
CLR CT_595 ;拉低鎖存器控制脈沖
NOP
NOP
SETB CT_595 ;上升沿將數據送到輸出鎖存器,LED數碼管顯示“0”
NOP
NOP
CLR CT_595
RET
;*****移位寄存器接收一個字節(如3FH)數據子程序
WR_595:
MOV R4,#08H ;一個字節數據(8位)
MOV A,R0 ;R0中存放要送入的數據3FH
LOOP:
;第一步:準備移入74HC595數據
RLC A ;數據移位
MOV DS_595,C ;送數據到串行數據輸入端上(P1.0)
;第二步:產生一上升沿將數據移入74HC595
CLR CH_595 ;拉低移位時鐘
NOP
NOP
setb CH_595 ;上升沿發生移位(移入一數據)
WR_595:
MOV R4,#08H ;一個字節數據(8位)
MOV A,R0 ;R0中存放要送入的數據3FH
LOOP:
;第一步:準備移入74HC595數據
RLC A ;數據移位
MOV DS_595,C ;送數據到串行數據輸入端上(P1.0)
;第二步:產生一上升沿將數據移入74HC595
CLR CH_595 ;拉低移位時鐘
NOP
NOP
setb CH_595 ;上升沿發生移位(移入一數據)
DJNZ R4,LOOP ;一個字節數據沒移完繼續
RET
RET
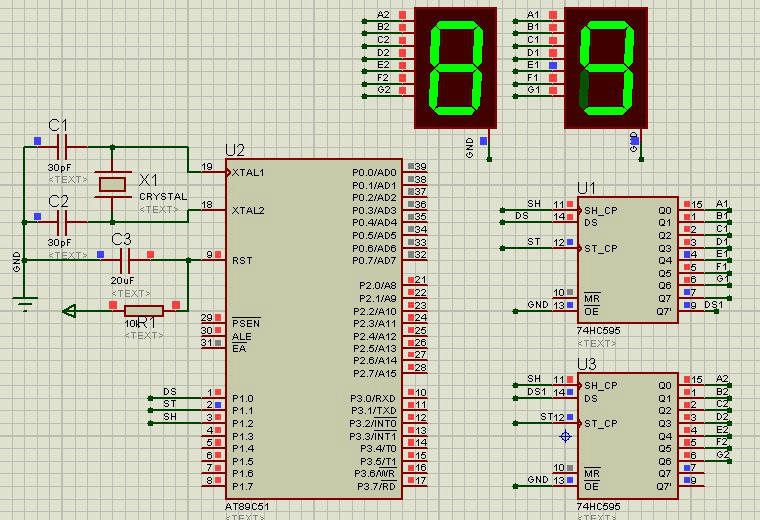
而其級聯的應用
74HC595主要應用于點陣屏,以16*16點陣為例:傳送一行共二個字節(16位)
如:發送的是06H和3FH。其方法是:
1.先送數據3FH,后送06H。
2.通過級聯串行輸入后,3FH在IC2內,06H在IC1內。應用如圖二
3.接著送鎖存時鐘,數據被鎖存并出現在IC1和IC2的并行輸出口上顯示。
74HC595主要應用于點陣屏,以16*16點陣為例:傳送一行共二個字節(16位)
如:發送的是06H和3FH。其方法是:
1.先送數據3FH,后送06H。
2.通過級聯串行輸入后,3FH在IC2內,06H在IC1內。應用如圖二
3.接著送鎖存時鐘,數據被鎖存并出現在IC1和IC2的并行輸出口上顯示。
編程方法:
數據在30H和31H中
;MOV 30H,#3FH
;MOV 31H,#06H
;*****接口定義:
DS_595 EQU P1.0 ;串行數據輸入(595-14)
CH_595 EQU P1.2 ;移位時鐘脈沖(595-11)
CT_595 EQU P1.1 ;輸出鎖存器控制脈沖(595-12)
DS_595 EQU P1.0 ;串行數據輸入(595-14)
CH_595 EQU P1.2 ;移位時鐘脈沖(595-11)
CT_595 EQU P1.1 ;輸出鎖存器控制脈沖(595-12)
;*****串行輸入16位數據
MOV R0,30H
CALL WR_595 ;串行輸入3FH
nop
NOP
MOV R0,31H
CALL WR_595 ;串行輸入06H
NOP
NOP
SETB CT_595 ;上升沿將數據送到輸出鎖存器,顯示
NOP
NOP
CLR CT_595
RET
MOV R0,30H
CALL WR_595 ;串行輸入3FH
nop
NOP
MOV R0,31H
CALL WR_595 ;串行輸入06H
NOP
NOP
SETB CT_595 ;上升沿將數據送到輸出鎖存器,顯示
NOP
NOP
CLR CT_595
RET
MC74HC595A包括一個8位移位寄存器和一個8位D型鎖存器和三態并行輸出。移位寄存器接受串行數據并提供串行輸出。移位寄存器也提供并行數據輸出和8位鎖存器。移位寄存器和鎖存器都有獨立的時鐘輸入。這個IC還具有異步復位的功能。
HC595A可以直接和CMOS MPU的和MCU的SPI接口進行連接。

#include"reg51.h"
sbit DS_595= P1^0;
sbit CT_595= P1^1;
sbit CH_595= P1^2;
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
void WR_595(void)
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
DS_595=1;
}
else
{
DS_595=0;
}
CH_595=0;
delay(2);
CH_595=1;
}
}
void main()
{
int m;
for(m=0;m<16;m++)
{
temp=tab[m];
WR_595();
CT_595=0;
delay(2);
CT_595=1;
delay(2);
CT_595=0;
delay(500);
}
}
#include"reg51.h"
sbit DS_595= P1^0;
sbit CT_595= P1^1;
sbit CH_595= P1^2;
sbit AA=P1^3;
sbit BB=P1^4;
int yu[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp,court,gg,ss,m,n,j;
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
void WR_595(void)
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
DS_595=1;
}
else
{
DS_595=0;
}
CH_595=0;
delay(2);
CH_595=1;
}
}
void display(m)
{
temp=yu[m];
WR_595();
CT_595=0;
delay(1);
CT_595=1;
delay(1);
}
void main()
{
for(m=0;m<1000;m++)
{
n=m/1000;
BB=1;AA=1;
P2=0x80;
display(n);
n=(m%1000)/100;
BB=1;AA=0; P2=0x40;
display(n);
n=((m%1000)%100)/10;
BB=0;AA=1; P2=0x20;
display(n);
n=m%10;
AA=0;BB=0; P2=0x01;
display(n);
delay(600);
}
}
